【关注公众号后台发送“模板”】
【可获取PPT源文件分享方式】
案例解析
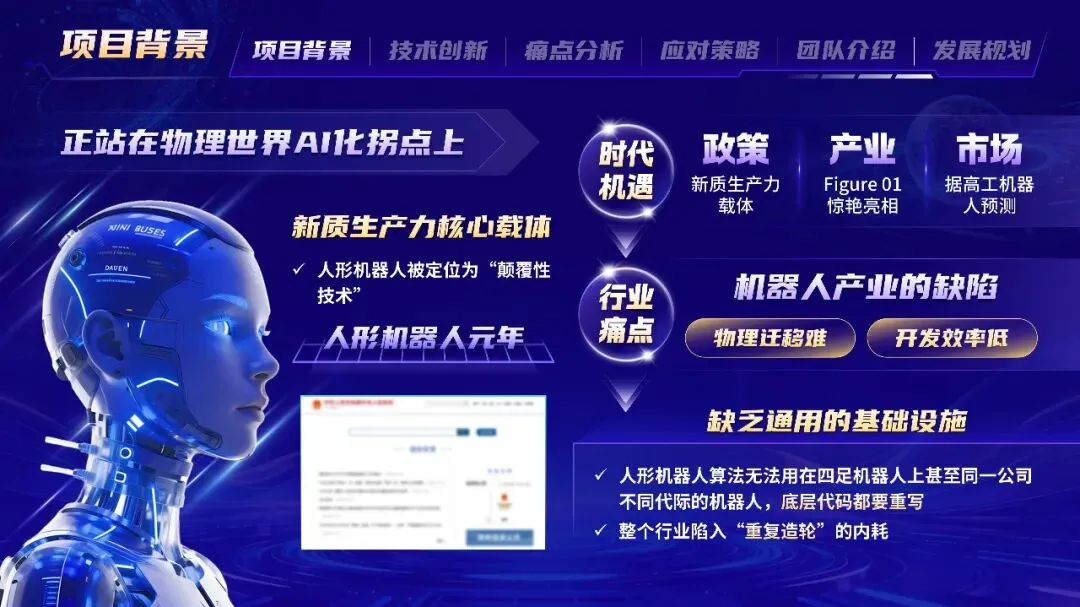
本项目为全国大学生创新创业大赛参赛成果,聚焦“人形机器人运动控制算法复用率低、仿真到现实迁移困难”的行业痛点,系统构建软硬解耦、算法定义、即插即控的技术架构,实现核心代码100%自主可控,为机器人产业突破“重复造轮”内耗困境提供通用解决方案与关键技术支撑。
1.大赛定位瞄准新质生产力核心载体——人形机器人这一“颠覆性技术”领域,以大模型时代“大脑”已突破、但“小脑”仍割裂的产业痛点为切入点,以技术创新与产业应用深度融合为导向,契合国家人工智能与机器人产业发展战略。
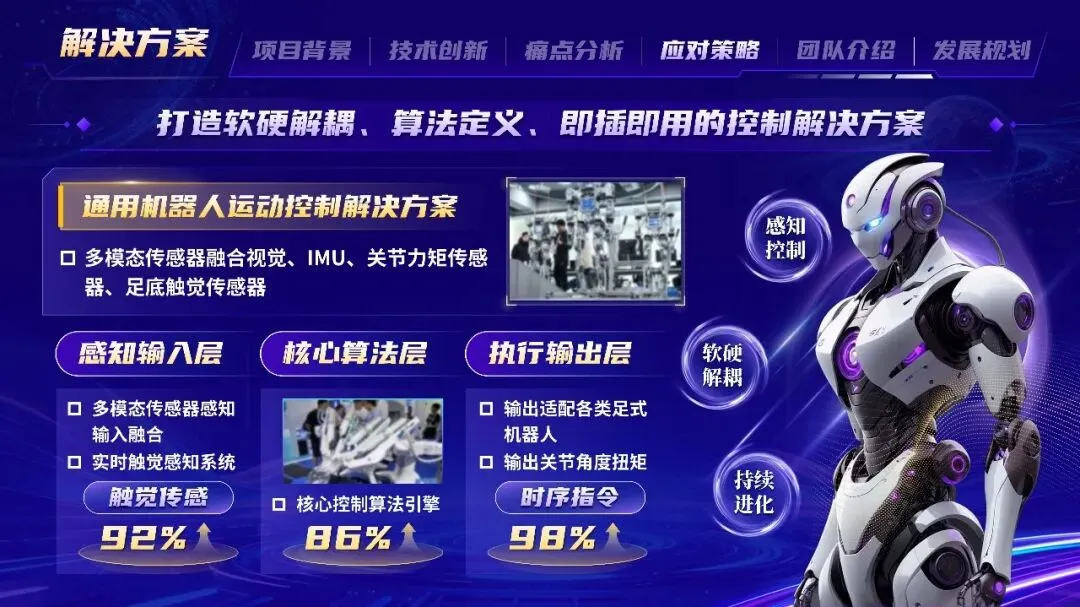
2.核心创新围绕机器人运动控制系统通用化这一核心命题,系统构建三大维度算法创新,从底层逻辑重构运动控制范式:通过多模态传感器融合(视觉、IMU、关节力矩、足底触觉)构建感知闭环,研发核心控制算法引擎,打造跨平台复用的通用控制解决方案。
3.团队优势汇聚兼具技术深度、产业经验和创业基因的硬核团队,在顶尖导师指导下,形成“核心技术研发—产品原型验证—产业合作推广”的完整链条,保障技术方案的创新性与落地可行性。
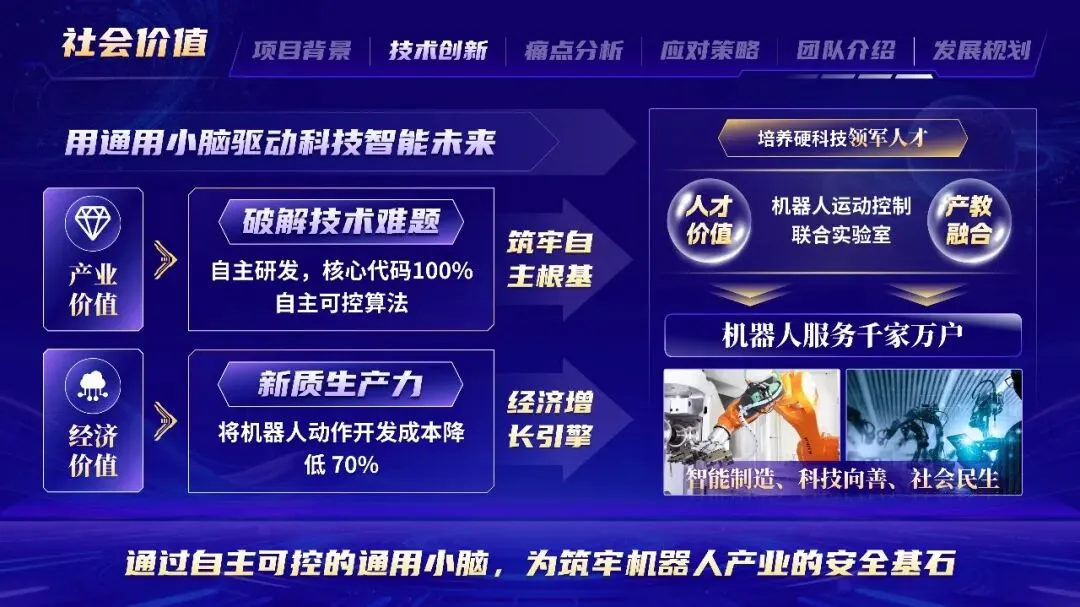
4.应用价值该通用运动控制系统可服务500余家客户、累计50万台机器人,与本体厂商建立合作,有望成为机器人领域的操作系统并定义行业标准,形成完整产业生态,以“通用小脑”驱动科技智能未来,推动我国机器人产业从“跟随”走向“引领”。
【PPT共计12页,源文件均可编辑和修改】
【专注拆解各类竞赛金奖作品PPT】
【教学创新大赛|教师技能大赛|说课比赛|青教赛】
【大创赛|职业规划大赛|挑战杯等】
【有PPT设计需求的同学或老师,私信了解更多~】
【需要ppt模板或定制服务后台回复“模板”即可】
#全国大学生创新创业大赛#互联网加#挑战杯#职业生涯规划大赛#大学生比赛