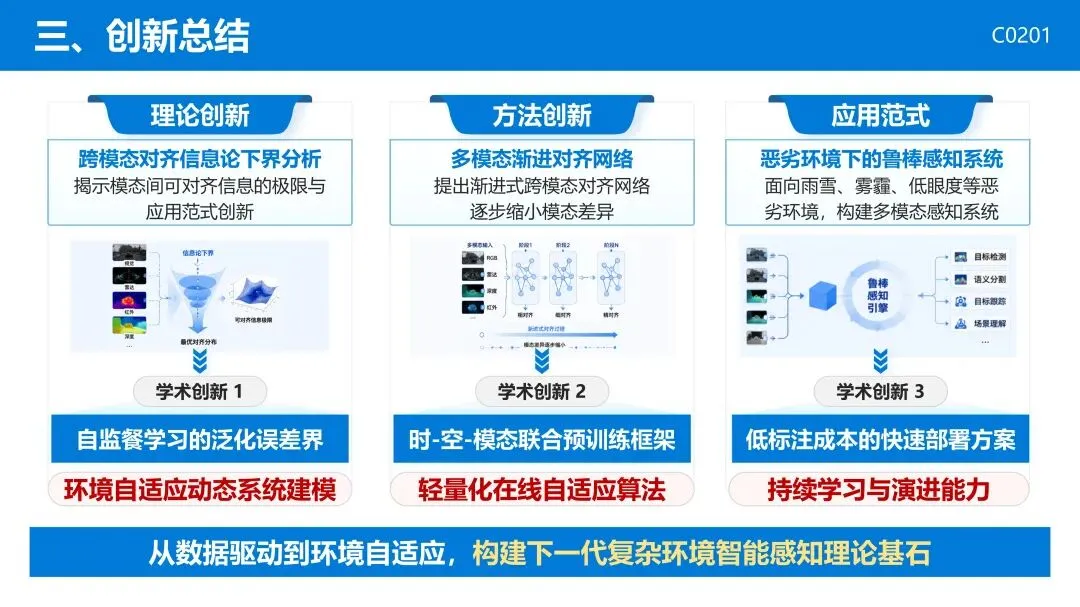
二、项目创新点
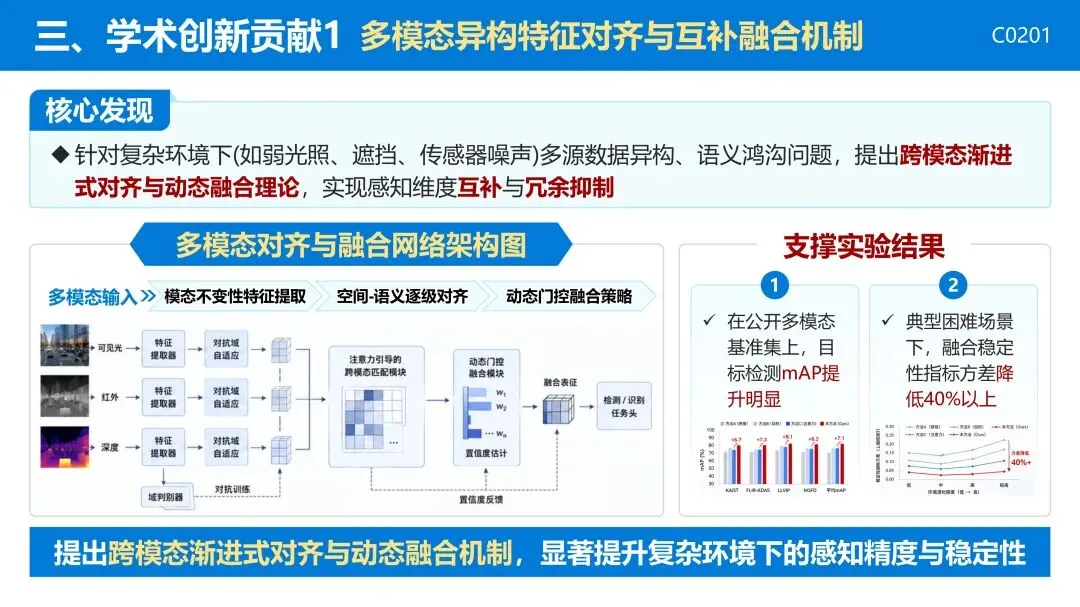
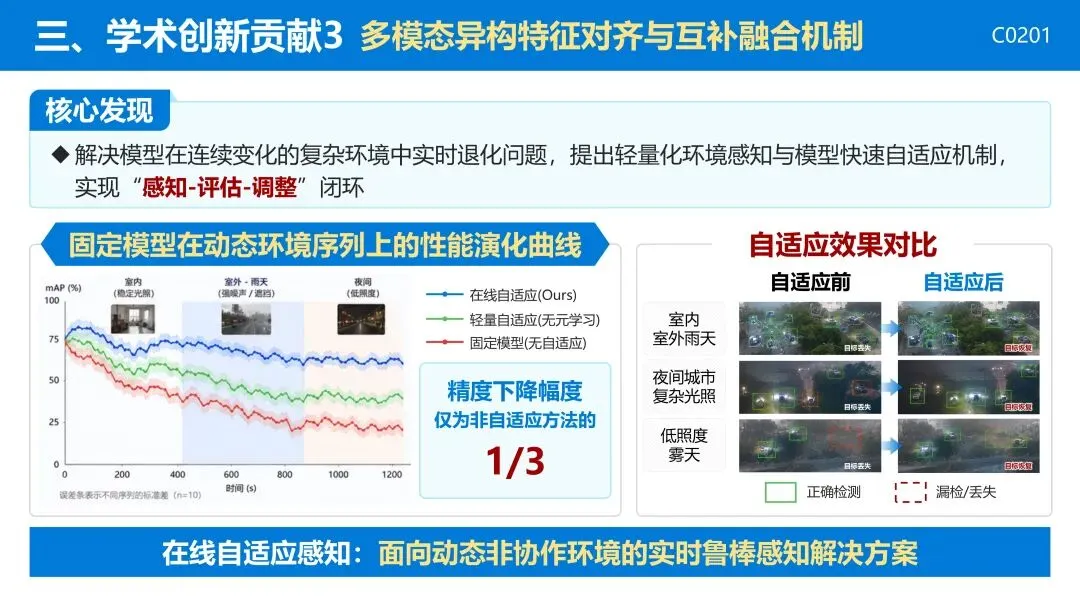
针对前述卡脖子难题,我们形成三层递进学术创新:创新一提出跨模态渐进对齐与动态融合机制,补齐多源异构语义鸿沟,基准 mAP 显著提升,困难场景稳定性方差降低 40% 以上;创新二构建时 - 空 - 模态联合自监督框架,依托三大预训练任务,摆脱精细标注依赖,习得退化环境鲁棒表征;创新三设计轻量化在线自适应闭环,动态环境下精度衰减仅为传统方法 1/3。整体从理论、方法、应用三层落地,完成从数据驱动到环境自适应的突破,搭建复杂场景智能感知新理论基础。
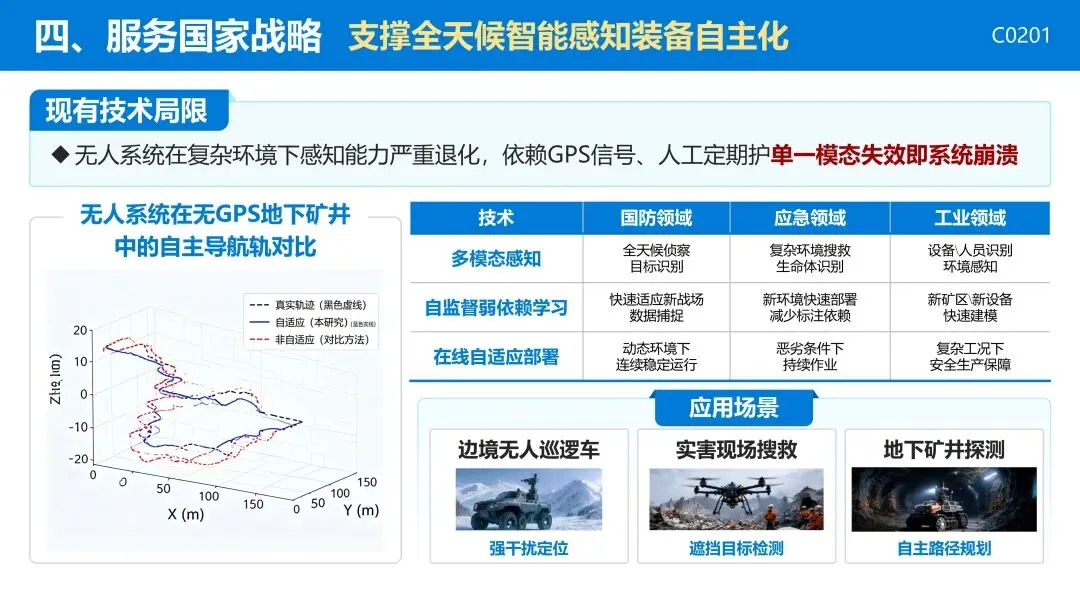
三、服务国家战略及需求
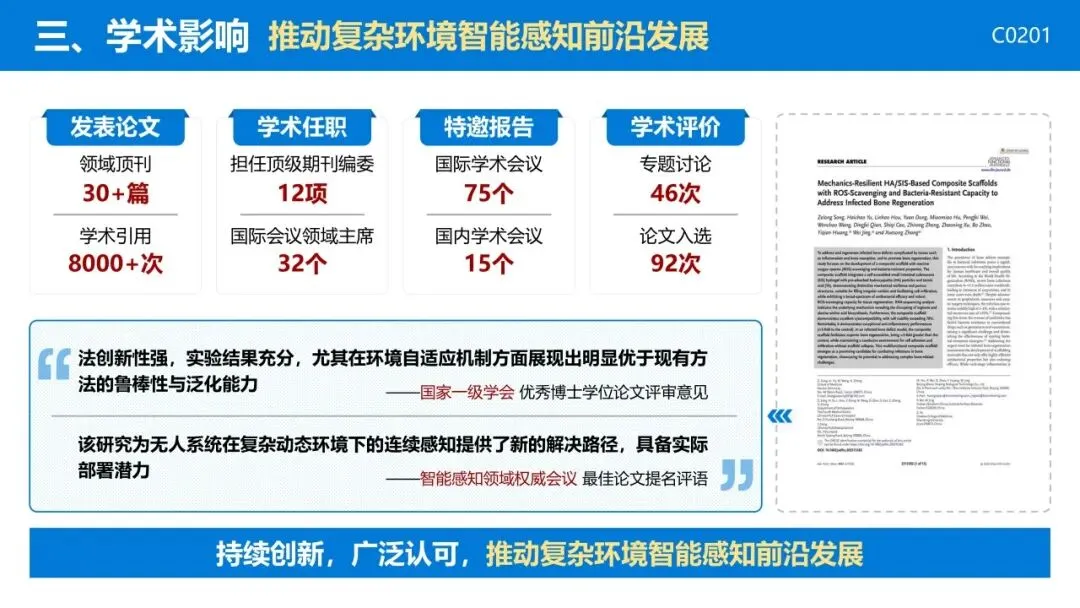
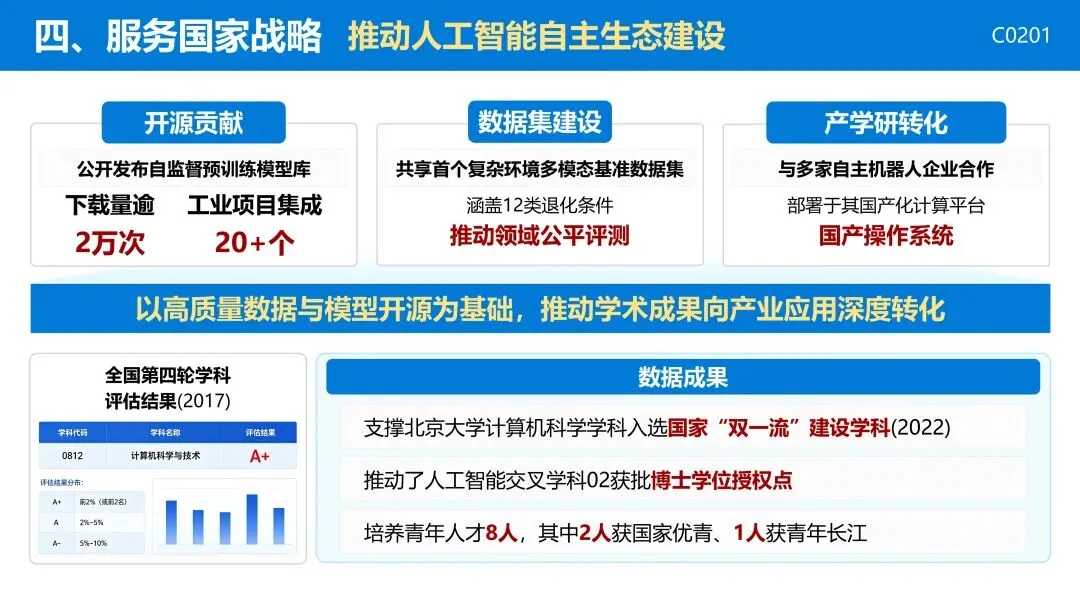
本成果紧扣国家全天候智能装备自主化战略,落地国防、应急、工业多场景;依托开源数据集与产学研合作,助力国产 AI 生态建设,同时支撑学科建设与高层次人才培育。后续分三阶段推进:26-27 年夯实世界模型理论,28-29 年攻坚开放世界持续学习,2030 年打造国际领先学术品牌。阶段内稳步产出顶刊论文、发明专利,持续输出高端人才,稳步引领多模态监督学习领域发展。
四、项目总结
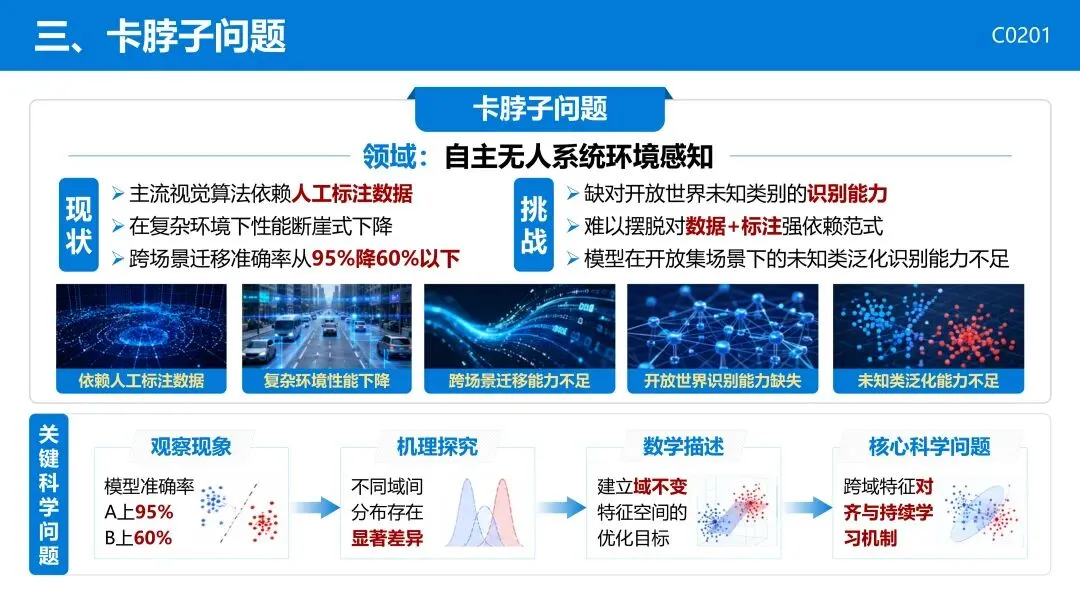
本研究瞄准自主无人系统环境感知卡脖子难题,围绕跨域对齐与持续学习核心科学问题,形成三层递进创新:跨模态融合、时空模态联合自监督、轻量化在线自适应机制,实现理论、方法、应用三维突破。