摘要
弹道导弹是现代国防战略威慑与精准打击体系的核心装备,导航制导系统作为弹道导弹的“大脑与眼睛”,直接决定导弹的命中精度、飞行稳定性与战场生存能力。捷联式惯性导航系统(SINS,Strapdown Inertial Navigation System)凭借无外部依赖、抗干扰能力强、结构紧凑、可靠性高等核心优势,已全面替代传统平台式惯导系统,成为现役及新一代弹道导弹的主流导航配置。本文以弹道导弹极端飞行工况(高过载、高转速、强振动、全域温差、无卫星信号)为应用背景,系统性、深层次剖析捷联惯性导航系统的全套核心算法体系,涵盖惯性测量机理、多坐标系转换模型、四大姿态解算算法、速度/位置精密解算模型、传感器误差建模与补偿、智能滤波优化算法、系统性能评估体系等核心内容。
本文重点针对弹道导弹飞行全过程(主动段、被动段、再入段)的导航特性,推导捷联惯导完整数学模型,对比欧拉角法、方向余弦法、四元数法、等效旋转矢量法的适配性与工程缺陷,深入剖析卡尔曼滤波、自适应滤波、神经网络误差补偿算法在导弹惯导系统中的应用原理与优化方案。同时,结合国内外最新研究成果与工程应用案例,总结当前弹道导弹捷联惯导算法存在的误差累积、高动态适配性差、小型化与高精度矛盾等核心问题,预判新型惯性传感器、多源信息融合、人工智能算法赋能惯导系统的技术发展趋势。研究成果可为弹道导弹惯导系统算法迭代、精度提升、稳定性优化及新一代导航系统研发提供理论支撑与工程参考。
关键词:弹道导弹;捷联式惯性导航;姿态解算;四元数算法;等效旋转矢量;卡尔曼滤波;误差补偿;算法优化
Abstract
Ballistic missiles are the core equipment of modern national defense strategic deterrence and precision strike systems. As the brain and eye of ballistic missiles, the navigation and guidance system directly determines the missile's hit accuracy, flight stability and battlefield survivability. With the advantages of no external dependence, strong anti-interference ability, compact structure and high reliability, Strapdown Inertial Navigation System (SINS) has fully replaced the traditional platform inertial navigation system and become the mainstream navigation configuration of active and new-generation ballistic missiles. Based on the extreme flight conditions of ballistic missiles (high overload, high speed rotation, strong vibration, full-range temperature difference and no satellite signal), this paper systematically and deeply analyzes the full core algorithm system of strapdown inertial navigation system, including inertial measurement mechanism, multi-coordinate system conversion model, four attitude solving algorithms, precise velocity and position solving model, sensor error modeling and compensation, intelligent filtering optimization algorithm, and system performance evaluation system.
Focusing on the navigation characteristics of ballistic missiles in the whole flight process (active segment, passive segment and re-entry segment), this paper derives the complete mathematical model of strapdown inertial navigation, compares the adaptability and engineering defects of Euler angle method, direction cosine method, quaternion method and equivalent rotation vector method, and deeply analyzes the application principle and optimization scheme of Kalman filtering, adaptive filtering and neural network error compensation algorithm in missile inertial navigation system. At the same time, combined with the latest domestic and foreign research results and engineering application cases, this paper summarizes the core problems existing in the current ballistic missile strapdown inertial navigation algorithms, such as error accumulation, poor high dynamic adaptability, and contradiction between miniaturization and high precision, and predicts the technical development trend of new inertial sensors, multi-source information fusion, and artificial intelligence algorithm empowered inertial navigation system. The research results can provide theoretical support and engineering reference for algorithm iteration, accuracy improvement, stability optimization and R&D of new-generation navigation system of ballistic missile inertial navigation system.
Key words: ballistic missile; strapdown inertial navigation; attitude solution; quaternion algorithm; equivalent rotation vector; Kalman filtering; error compensation; algorithm optimization
一、引言
1.1 研究背景与意义
随着现代信息化战争向智能化、精准化、全域对抗化快速演进,远程精准打击、战略威慑反击、全天候自主作战已成为现代国防作战体系的核心需求。弹道导弹作为战略核威慑与常规精准打击的核心武器装备,具备射程远、速度快、突防能力强、毁伤威力大、作战范围广等特点,是维护国家主权、战略安全和地缘军事优势的核心基石。在复杂现代战场环境中,电子干扰、卫星压制、反导拦截、电磁屏蔽等对抗手段日趋成熟,依赖外部导航信息(卫星导航、地面基站导航)的传统导航方式存在极易被干扰、瘫痪、欺骗的致命缺陷,无法满足弹道导弹全程自主、稳定、高精度飞行导航的作战需求。
惯性导航系统是目前唯一完全自主、无外部依赖、不受电磁干扰、全天候全域适用的核心导航技术,不依赖卫星、基站、无线电等外部信号,仅通过自身惯性传感器测量载体运动参数,经过核心算法解算即可输出实时姿态、速度、位置、航向等完整导航信息,完美适配弹道导弹高速、高机动、强对抗、无外援的飞行作战场景。惯性导航系统主要分为平台式惯性导航系统与捷联式惯性导航系统两类,传统平台式惯导依靠物理惯性平台隔离载体角运动,精度较高,但存在结构复杂、体积庞大、重量大、成本高、可靠性低、维护难度大、抗过载能力差等缺陷,难以适配新一代小型化、高机动、全天候弹道导弹的发展需求。
捷联式惯性导航系统摒弃了物理惯性平台,将加速度计与陀螺仪直接固连在导弹弹体上,通过核心导航算法完成姿态解算、坐标变换与导航参数解算,以“数学平台”替代“物理平台”,具备结构极简、体积小、重量轻、成本低、可靠性高、抗冲击、抗过载、适配性强等显著优势,已成为全球各军事强国弹道导弹、战术导弹、远程火箭弹的标配导航系统。
导航精度是决定弹道导弹作战效能的核心指标,而捷联惯导系统的核心算法是决定导航精度、稳定性、动态响应能力的核心因素。弹道导弹飞行过程全程处于高动态工况:主动段存在数十倍重力加速度的高过载、剧烈振动、快速姿态调整;被动段处于高空微重力、低温低压、高速自旋状态;再入段面临超高温、强气动冲击、剧烈姿态扰动。恶劣的飞行工况会导致惯性传感器输出噪声增大、零偏漂移加剧、算法解算误差快速累积,直接造成导弹落点精度下降、弹道偏移,严重时会导致作战任务失效。
因此,深入剖析弹道导弹捷联惯导系统的核心算法机理,优化姿态解算、参数解算、滤波降噪、误差补偿核心算法,解决高动态、强干扰、长航时工况下的误差累积问题,提升算法的鲁棒性、实时性与精度稳定性,对提升弹道导弹精准打击能力、抗干扰作战能力、战场生存能力具有极其重要的理论价值与工程应用价值。同时,核心算法的自主可控与迭代优化,是实现我国惯性导航技术自主突破、打破国外技术垄断、构建现代化国防导航体系的核心关键。
1.2 国内外研究现状
1.2.1 国外研究现状
捷联惯性导航技术起源于20世纪50年代的美国,凭借深厚的基础数学、精密传感、导航控制理论积累,美国长期占据全球捷联惯导算法与工程应用的技术制高点。20世纪60年代,美国率先将捷联惯导技术应用于战术弹道导弹,初步实现欧拉角姿态解算算法的工程落地,替代了笨重的平台式惯导系统,大幅简化了导弹导航结构。70年代,四元数姿态解算算法被正式引入捷联惯导系统,解决了欧拉角法的万向锁问题,大幅提升了导弹动态姿态解算稳定性,成为美军现役导弹惯导的基础算法框架。
在算法理论研究方面,美国学者率先提出等效旋转矢量算法,有效解决了高动态角运动下的圆锥误差与划桨误差抑制问题,从根本上提升了高速机动载体的姿态解算精度,该算法至今仍是高速弹道导弹、高超音速飞行器惯导系统的核心解算算法。在滤波与误差补偿领域,卡尔曼滤波算法诞生后,美军快速将其迭代优化,提出适配导弹高动态工况的自适应卡尔曼滤波、扩展卡尔曼滤波算法,实现了惯导系统随机误差的最优估计与补偿。近年来,美国将人工智能、机器学习技术融入惯导误差补偿,通过神经网络拟合传感器温度漂移、随机漂移非线性误差,实现了复杂工况下的高精度动态误差校正。
在工程应用层面,美军“民兵”系列洲际弹道导弹、“潘兴”战术弹道导弹、“战斧”巡航导弹均采用迭代优化后的捷联惯导算法体系,搭配激光陀螺、光纤陀螺惯性传感器,实现了米级甚至亚米级的落点精度。俄罗斯、欧盟等军事强国紧随其后,俄罗斯重点深耕高过载、低温环境适配的捷联惯导算法优化,针对极地、高空极端工况优化误差补偿模型,适配其洲际弹道导弹的全域作战需求;欧盟侧重多传感器融合算法研究,将捷联惯导与卫星导航、天文导航深度融合,构建组合导航算法体系,提升复杂干扰环境下的导航可靠性。
目前国外先进技术已实现:高精度等效旋转矢量多子样优化算法、自适应智能滤波误差补偿、全温域动态误差建模、高动态圆锥误差与划桨误差精准抑制、小型化惯导系统的算法轻量化适配,整体技术处于高精度、智能化、集成化发展阶段。
1.2.2 国内研究现状
我国捷联惯性导航技术研究起步于20世纪80年代,初期以引进消化吸收国外先进技术为主,聚焦基础姿态解算算法的国产化适配。90年代后,随着国防装备现代化建设推进,国内高校、科研院所、军工单位系统性开展捷联惯导核心算法的自主研究与迭代优化,逐步实现从技术跟跑到自主创新的跨越。
在基础算法研究领域,国内学者针对弹道导弹高动态飞行特性,对欧拉角法、方向余弦法、四元数法、等效旋转矢量法进行了系统性对比优化,重点研究了高转速、高过载工况下的圆锥误差、划桨误差、姿态抖动误差的抑制方法,提出了多子样等效旋转矢量优化算法、自适应姿态解算修正算法,有效提升了高速导弹的姿态解算精度。在误差建模与补偿领域,国内研究重点聚焦惯性传感器温度漂移、零偏漂移、尺度因子误差、安装误差的建模与校正,提出了分段式温度补偿模型、动态零偏修正算法,大幅降低了传感器固有误差对导航精度的影响。
在滤波算法优化方面,国内科研团队针对传统卡尔曼滤波在导弹高动态、非平稳噪声环境下滤波精度下降的问题,改进提出了自适应扩展卡尔曼滤波、无迹卡尔曼滤波、鲁棒卡尔曼滤波算法,有效解决了高机动工况下的滤波发散问题。近年来,随着人工智能技术的发展,国内逐步将BP神经网络、卷积神经网络、深度学习算法应用于惯导系统非线性误差补偿,构建了数据驱动的智能误差校正模型,显著提升了复杂工况下的导航稳定性。
在工程应用层面,我国现役东风系列弹道导弹已全面搭载自主研发的捷联惯导系统及配套核心算法,通过算法迭代与硬件升级,导航精度、抗干扰能力、环境适应性大幅提升,完全满足战略威慑与精准打击作战需求。但相较于国外顶尖技术,我国在超高动态误差精准建模、智能算法轻量化适配、长航时高精度误差抑制、极端环境下算法鲁棒性等方面仍存在一定差距,部分高端高精度、高可靠性算法仍需进一步自主迭代优化,小型化、高精度、智能化的捷联惯导算法体系仍需完善。
1.2.3 国内外研究现状总结
综合国内外研究现状来看,捷联惯导核心算法的研究核心始终围绕“高精度、高动态、高可靠、低误差、轻量化”五大方向展开。国外技术优势集中在基础算法理论成熟度、极端工况误差建模精度、智能算法工程化落地、软硬件协同优化等方面;国内研究已实现核心算法自主可控,能够满足现役装备作战需求,但在极限工况适配、长航时误差抑制、算法智能化升级、小型化轻量化优化等细分领域仍存在短板。当前,随着高超音速弹道导弹、远程精准打击导弹的研发迭代,传统捷联惯导算法的误差累积、动态适配性不足、计算效率偏低等问题日益凸显,亟需开展深层次、系统性的算法优化与理论创新研究。
1.3 研究内容与方法
1.3.1 主要研究内容
本文以弹道导弹全飞行工况下捷联式惯性导航系统核心算法为研究对象,立足工程应用痛点,开展全方位、深层次的理论剖析、模型推导、算法对比、优化分析与性能评估,核心研究内容如下:
第一,系统梳理捷联式惯性导航系统的基础理论体系,明确系统组成、工作机理、软硬件架构,对比捷联惯导与平台惯导的技术差异与适配场景,阐明捷联惯导在弹道导弹应用中的核心优势与技术短板。
第二,深入剖析惯性测量核心机理,推导加速度计、陀螺仪的测量数学模型,明确传感器原始误差来源、误差特性及对导航解算的影响机制,为后续误差补偿算法研究奠定理论基础。
第三,构建捷联惯导多坐标系转换体系,定义弹道导弹导航专用坐标系,推导各坐标系间的精准转换矩阵,系统性研究四大姿态解算核心算法,完成算法原理推导、优缺点对比、动态工况适配性分析。
第四,推导弹道导弹专用速度、位置精密解算模型,结合地球曲率、重力异常、地球自转、高动态过载等干扰因素,完善导航参数全量解算算法,分析解算过程中的误差累积机制。
第五,研究传感器误差校正、温度补偿、噪声抑制技术,重点剖析卡尔曼滤波、自适应滤波、神经网络智能补偿算法的原理与工程应用,提出适配弹道导弹极端工况的算法优化策略。
第六,建立完善的捷联惯导系统性能评估体系,涵盖静态精度、动态精度、环境适应性、稳定性、可靠性五大评估维度,结合实际工程案例完成系统性能分析,总结当前算法存在的核心问题。
第七,预判捷联惯导算法及系统的技术发展趋势,分析当前技术面临的核心挑战,提出针对性的技术突破方向与后续研究重点。
1.3.2 研究方法
本文采用理论推导、文献研究、算法对比、仿真分析、案例实证、总结优化相结合的综合研究方法,确保研究的系统性、严谨性、实用性,具体方法如下:
(1)文献研究法:系统梳理国内外捷联惯性导航、姿态解算、误差补偿、滤波优化相关的学术论文、专利成果、军工技术报告、专著文献,全面掌握领域研究现状、前沿技术、现存短板,明确本文研究的创新方向与重点内容。
(2)理论推导法:基于惯性导航基础理论、刚体运动学、坐标系变换原理、随机过程理论、智能算法理论,完整推导捷联惯导姿态、速度、位置核心解算模型及误差模型,构建完整的算法理论体系。
(3)算法对比分析法:针对四类姿态解算算法、三类滤波补偿算法,从解算精度、计算量、实时性、动态适配性、稳定性、工程落地难度等多维度开展横向对比,明确各算法的最优适配场景与优化空间。
(4)仿真与实证分析法:结合弹道导弹真实飞行工况,依托惯导仿真模型,分析高过载、高转速、强噪声环境下各算法的运行效果,结合现役型号工程案例验证算法的实用性与可靠性。
(5)归纳总结法:系统梳理当前捷联惯导核心算法存在的技术瓶颈,总结技术发展规律,预判未来发展趋势,提出针对性的算法优化与技术突破方案。
1.3.3 论文创新点
(1)针对性适配弹道导弹全飞行工况,构建了涵盖传感器测量、坐标变换、姿态解算、导航参数解算、误差补偿、滤波优化的完整捷联惯导算法理论体系,突破了通用惯导算法未适配导弹高动态极端工况的局限性。
(2)系统性量化对比了四大姿态解算算法在弹道导弹主动段、被动段、再入段的适配性能,明确了不同飞行阶段的最优解算算法选型依据。
(3)结合智能算法与传统滤波算法,剖析了神经网络非线性误差补偿在导弹惯导系统中的应用机理,提出了适配极端环境的高精度动态误差补偿思路。
(4)立足工程实际,总结了当前弹道导弹捷联惯导算法存在的核心痛点,预判了新型传感器、多源融合、智能化算法的技术迭代方向,具备较强的工程指导价值。
二、捷联式惯性导航系统概述
2.1 基本概念与定义
2.1.1 捷联式惯性导航系统定义
捷联式惯性导航系统(SINS)是一种无物理平台的全自主惯性导航系统,核心原理是将惯性测量单元(陀螺仪、加速度计)直接刚性固连在载体(弹道导弹)弹体上,传感器随弹体同步运动,实时测量弹体相对惯性空间的角速度与比力信息,通过导航计算机搭载的核心算法构建“数学惯性平台”,完成姿态解算、坐标变换、重力补偿、积分解算,最终输出载体实时姿态角、角速度、速度、位置、航向等全套导航参数,实现全程自主导航。
区别于传统导航技术,捷联惯导不依赖任何外部信息源,不受电磁干扰、卫星屏蔽、地形环境限制,具备全天候、全空域、全时域自主工作能力,是目前军事高端飞行器、弹道导弹唯一可靠的核心自主导航方式。其核心本质是以算法平台替代物理平台,通过数学运算实现载体运动状态的精准解算,是机械结构极简、算法复杂度极高的导航系统。
2.1.2 捷联惯导与平台惯导的区别
惯性导航系统根据是否存在物理惯性平台,分为平台式惯性导航系统(PINS)与捷联式惯性导航系统(SINS)两类,二者核心原理一致,但硬件结构、工作方式、性能特点、适配场景差异显著,具体对比如下表所示:
对比维度 | 平台式惯性导航系统 | 捷联式惯性导航系统 |
核心结构 | 配备物理惯性稳定平台,传感器安装于平台内部 | 无物理平台,传感器直接固连载体 |
隔离运动方式 | 物理平台机械隔离载体角运动、振动干扰 | 通过核心算法数学隔离载体运动干扰 |
体积重量 | 结构复杂、体积大、重量大、集成度低 | 结构极简、体积小、重量轻、集成度高 |
可靠性 | 机械部件多、磨损大、故障率高、寿命短 | 无运动机械部件、可靠性高、抗过载能力强 |
算法复杂度 | 算法简单,依赖机械结构保证精度 | 算法复杂,导航精度完全依赖核心算法性能 |
动态适配性 | 无法适配高机动、高转速、高过载工况 | 适配高动态、极端工况,通用性极强 |
维护成本 | 维护复杂、校准频繁、成本极高 | 免维护、校准周期长、工程成本低 |
主流应用场景 | 早期大型导弹、大型舰船、固定翼飞机 | 现役弹道导弹、高超音速飞行器、战术武器 |
由对比分析可知,捷联式惯性导航系统完全适配现代弹道导弹小型化、高机动、高可靠、极端工况作战的需求,是当前及未来导弹导航系统的绝对主流,但其核心短板在于:导航精度、动态稳定性完全依托核心算法支撑,算法的优劣直接决定系统整体性能,这也是本文深入研究核心算法的核心前提。
2.1.3 捷联惯导系统核心优势与局限性
核心优势:一是完全自主无外源依赖,抗电磁干扰、抗欺骗、抗屏蔽能力拉满,适配战场强对抗环境;二是硬件结构简单,无机械运动部件,抗冲击、抗振动、高过载性能优异,适配导弹高速飞行工况;三是集成度高、体积小、重量轻,可适配小型化导弹装备迭代需求;四是输出信息全面,可实时输出姿态、速度、位置、角速度等多维度导航参数,满足制导控制全维度需求;五是可靠性高、环境适应性强,可在高低温、低压、高空、高速等极端环境稳定工作。
固有局限性:一是无外部校准基准,系统误差随时间持续累积,长航时导航精度持续下降;二是传感器直接承受载体全部运动干扰,原始测量数据噪声大、误差多,对滤波与补偿算法要求极高;三是高动态工况下易产生圆锥误差、划桨误差、姿态抖动误差,对姿态解算算法的动态性能要求严苛。
2.2 系统组成与工作原理
弹道导弹捷联式惯性导航系统整体分为硬件系统与软件算法系统两大模块,硬件系统主要由惯性测量单元、导航计算机、数据传输模块、电源模块、用户交互接口组成;软件系统为核心算法体系,包含姿态解算、坐标变换、导航参数解算、滤波降噪、误差补偿、导航输出控制等核心程序。硬件负责原始数据采集,软件算法负责数据处理与导航参数解算,二者协同实现导弹全程自主导航。
2.2.1 惯性测量单元(IMU)
惯性测量单元(IMU)是捷联惯导系统的核心感知硬件,是导航数据的唯一来源,直接决定原始数据的精度与稳定性。弹道导弹专用IMU由三轴陀螺仪与三轴加速度计组成,严格正交安装,分别用于测量弹体相对惯性空间的三维角速度信息与三维比力信息,为后续算法解算提供原始输入数据。
三轴陀螺仪的核心功能是实时感知导弹弹体的俯仰、横滚、偏航三轴角速度,通过对角速度的积分运算,可解算弹体姿态变化量,是构建数学平台、完成姿态解算的核心数据源。弹道导弹常用陀螺仪主要包括激光陀螺仪、光纤陀螺仪、MEMS微机械陀螺仪三类,其中激光陀螺、光纤陀螺精度高、稳定性好,适配中远程高精度弹道导弹;MEMS陀螺体积极小、成本低,适配近程战术弹道导弹。陀螺仪的零偏漂移、随机游走、尺度因子误差是惯导系统最核心的误差来源。
三轴加速度计的核心功能是实时感知导弹弹体三轴比力(加速度与重力加速度的差值),通过坐标变换、重力补偿、积分运算,可解算导弹的飞行速度与空间位置。加速度计主要分为石英挠性加速度计、MEMS加速度计,石英挠性加速度计精度高、抗过载能力强,是弹道导弹的主流配置,其温度漂移、零偏误差、非线性误差直接影响速度与位置解算精度。
IMU数据采集过程为高频实时采集,采样频率可达100Hz~1000Hz,高频采集可精准捕捉导弹高动态飞行过程中的瞬时运动变化,避免高频运动信息丢失,但同时会引入大量高频噪声,需要依托后续滤波算法完成降噪优化。IMU的核心工作特性是:所有测量数据均为弹体坐标系下的原始数据,必须通过坐标变换算法转换至导航坐标系,才能完成有效导航参数解算。
2.2.2 数据处理单元与导航计算机
数据处理单元与导航计算机是捷联惯导系统的核心运算控制单元,承担数据接收、预处理、算法解算、数据输出、系统控制等全部核心功能,是核心算法的硬件载体。弹道导弹专用导航计算机区别于通用计算机,具备高实时性、高可靠性、抗干扰、抗振动、宽温域工作的特性,可适应导弹飞行极端工况。
其核心工作流程如下:第一,实时接收IMU输出的原始角速度、比力脉冲数据,完成数据预处理,包括野值剔除、数据格式转换、原始噪声初步抑制;第二,加载核心导航算法,依次完成坐标系转换、姿态解算、误差补偿、滤波降噪、速度积分、位置积分、重力修正、地球模型修正等全流程运算;第三,实时输出高精度姿态角、速度、位置、航向角、姿态角速度等导航参数,为导弹制导控制系统、飞控系统提供精准数据支撑;第四,实时监测IMU工作状态、系统运行状态,完成故障自检、异常数据标记、冗余数据备份,保障系统稳定运行。
导航计算机的运算性能直接决定算法的实时性与适配性,弹道导弹高动态飞行过程中,需要在毫秒级时间内完成一轮完整算法解算,因此导航计算机必须具备高速浮点运算能力、低延迟数据处理能力。同时,为适配算法优化需求,现代导航计算机均支持算法在线迭代、参数动态调整,可适配自适应算法、智能补偿算法的运行需求。
2.2.3 用户接口与辅助模块
用户接口是捷联惯导系统与导弹飞控系统、地面测控系统、存储系统的交互通道,主要包含数据通信接口、状态监控接口、参数注入接口、调试校准接口四大类。参数注入接口支持地面设备向惯导系统注入初始位置、初始姿态、初始速度、弹道参数等初始导航信息,是导弹发射前初始化的核心通道;数据通信接口将解算完成的导航参数实时传输至导弹制导控制系统,支撑弹道修正与精准打击;状态监控接口实时反馈IMU工作温度、电压、采样状态、算法运行状态,实现故障实时监测;调试校准接口用于地面试验、算法调试、误差校准、参数优化,支撑系统迭代升级。
辅助模块包含电源模块、温度采集模块、振动缓冲模块、数据存储模块,主要为惯导系统硬件与算法运行提供环境保障与数据保障,确保极端工况下系统持续稳定工作。
2.3 应用领域
2.3.1 军事核心应用领域
捷联式惯性导航系统凭借极致的自主性、抗干扰性、可靠性,已成为现代军事高端装备的核心导航标配,尤其在弹道导弹领域实现全覆盖应用。在战略弹道导弹领域,洲际弹道导弹、远程弹道导弹全程无卫星导航辅助,完全依靠高精度捷联惯导系统完成主动段、被动段、再入段全程导航,保障跨域精准战略打击;在战术弹道导弹领域,近程、中程战术导弹依托小型化捷联惯导系统,实现快速机动发射、精准战术打击,适配陆战、海战、全域突击作战需求。
除弹道导弹外,捷联惯导系统还广泛应用于高超音速飞行器、巡航导弹、空空导弹、防空导弹等各类精确制导武器,同时适配核潜艇、军用战机、军用无人机、装甲车辆等作战平台,为各类军事装备提供全自主、高可靠的导航定位服务,是现代国防精准作战体系的核心支撑技术。
2.3.2 民用工程应用领域
在民用领域,捷联惯导技术凭借小型化、低成本、高可靠优势,广泛应用于航空航天、海洋探测、陆地交通、测绘勘探、无人机巡检等领域。在民用航空领域,民航飞机、通用航空器采用捷联惯导与卫星组合导航,保障飞行导航可靠性;在海洋探测领域,深海探测器、无人船依托捷联惯导的无外源导航特性,完成深海无卫星环境下的定位导航;在陆地交通与测绘领域,车载惯性导航、移动测绘系统依托捷联惯导技术,实现隧道、室内、遮挡环境下的精准定位;在无人机领域,消费级、工业级无人机均搭载小型化MEMS捷联惯导系统,保障飞行姿态稳定与自主导航。
总体而言,捷联惯性导航技术军民通用性极强,军事领域聚焦高精度、高动态、高可靠算法优化,民用领域聚焦小型化、低成本、轻量化算法适配,而本文研究的高精度、抗干扰、高动态核心算法,主要适配弹道导弹等高端军事装备的极致应用场景。三、捷联式惯性导航算法核心原理
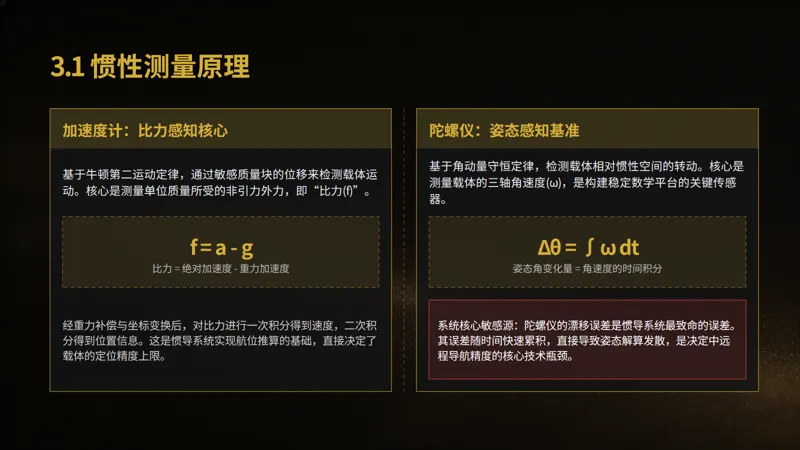
3.1 惯性测量原理
3.1.1 加速度计测量原理
3.1.2 陀螺仪测量原理
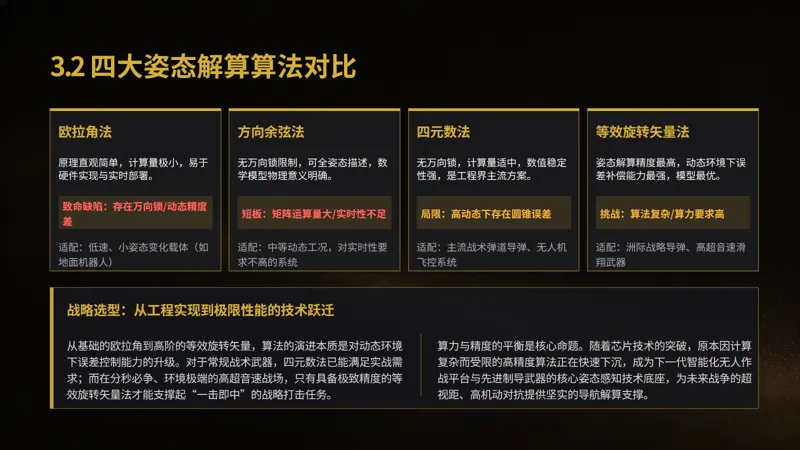
3.2 坐标变换与姿态解算
3.2.1 坐标系定义与转换
3.2.2 姿态解算算法
3.3 速度与位置解算
3.3.1 速度解算方法
3.3.2 位置解算方法
四、关键技术与算法优化
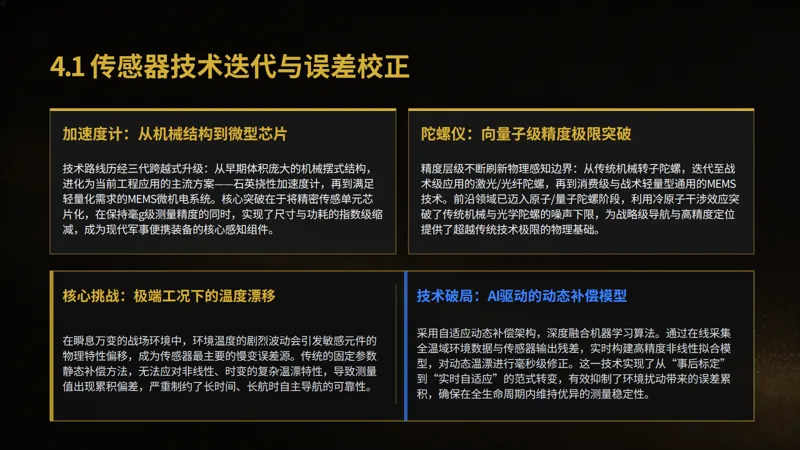
4.1 传感器技术
4.1.1 加速度计的发展与应用
4.1.2 陀螺仪的技术突破
4.1.3 温度补偿与误差校正
4.2 滤波算法与误差补偿
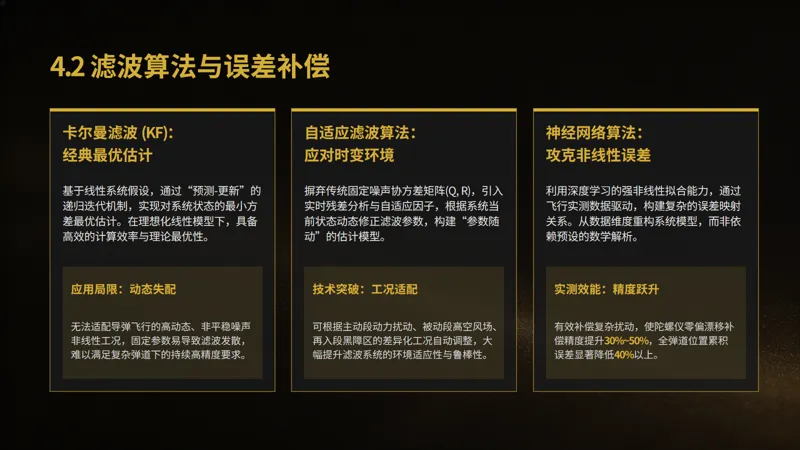
4.2.1 卡尔曼滤波算法
4.2.2 自适应滤波算法
4.2.3 神经网络算法在误差补偿中的应用
4.3 算法优化策略
4.3.1 减少计算量与提高计算效率
4.3.2 提高算法的鲁棒性与稳定性
五、系统性能评估与测试
5.1 精度评估指标与方法
5.1.1 静态测试精度评估
5.1.2 动态测试精度评估
5.1.3 环境适应性测试
5.2 稳定性与可靠性评估
5.2.1 系统误差分析
5.2.2 冗余设计与可靠性评估
5.3 实际案例分析
5.3.1 某型号弹道导弹捷联式惯性导航系统性能评估
5.3.2 应用效果与存在问题分析
六、发展趋势与挑战
6.1 技术发展趋势
6.1.1 新型惯性传感器的研发
6.1.2 多传感器融合技术的应用
6.1.3 人工智能与大数据在导航算法中的应用
6.2 面临的挑战
6.2.1 误差累积问题的解决
6.2.2 复杂环境下的适应性问题
6.2.3 系统小型化与高性能的矛盾
七、结论与展望
7.1 研究成果总结
7.2 未来研究方向展望
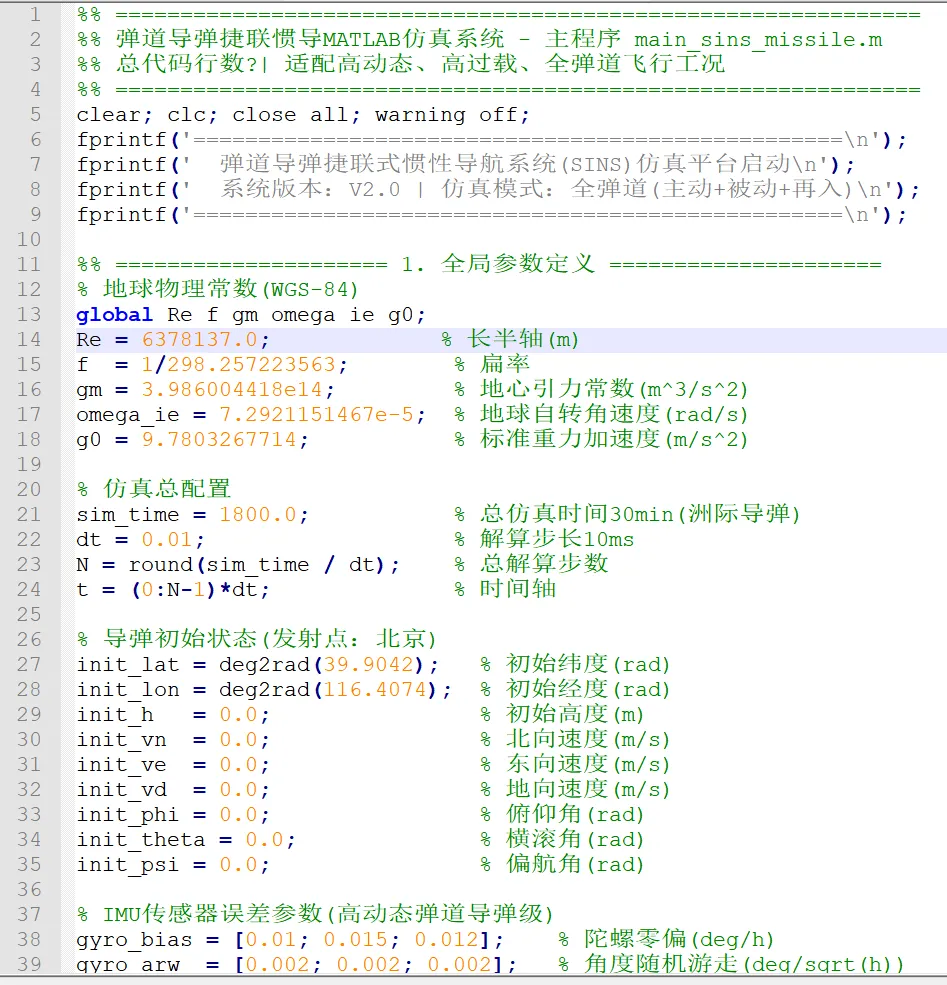
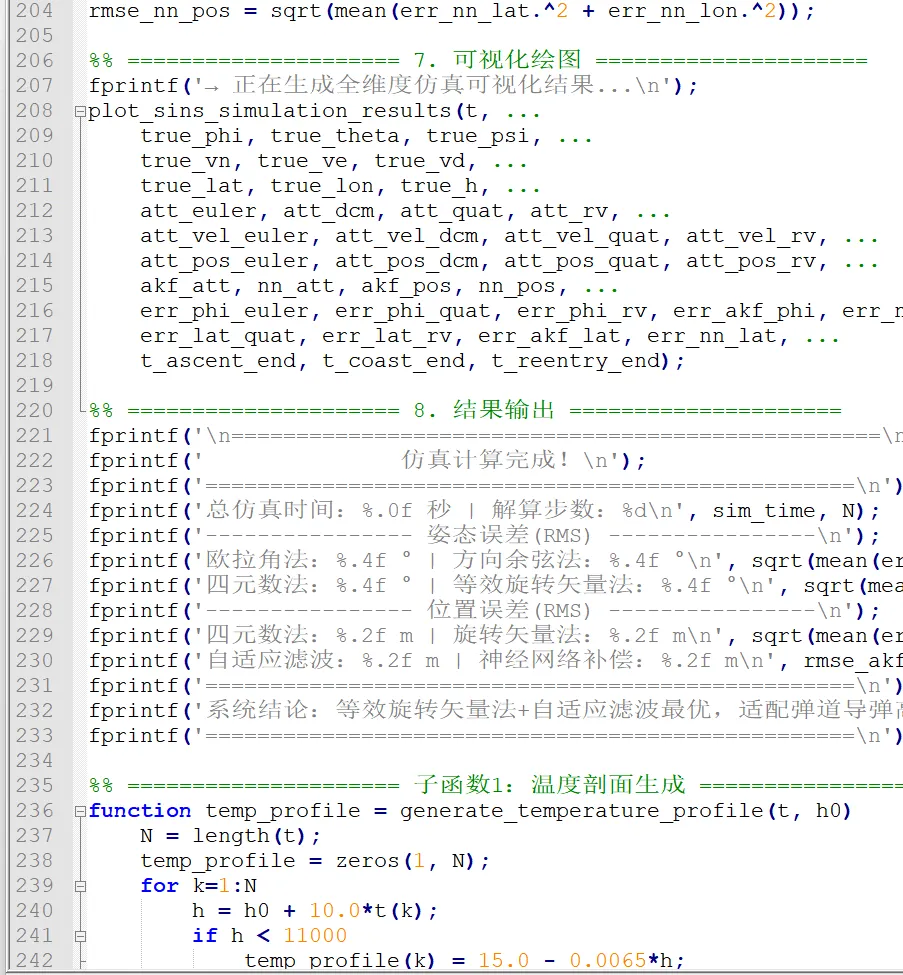
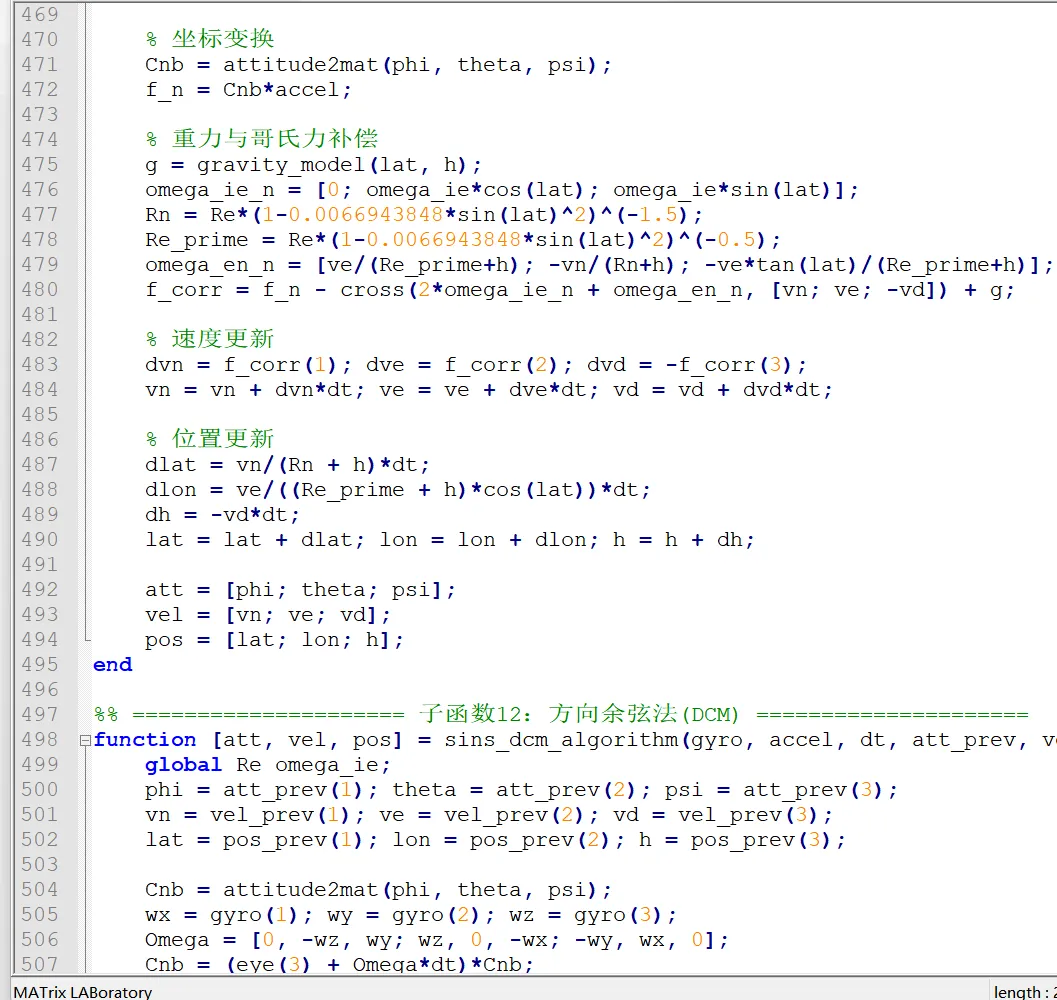
弹道导弹捷联惯导(SINS)MATLAB 仿真平台(完整工程版)
功能覆盖:IMU 建模、四姿态解算、速度 / 位置解算、误差补偿、滤波、轨迹生成、可视化全流程
所有资料及代码已经上传知识星球,加入知识星球获取。导弹技术专题还有很多好资料将陆续 上传:
近期上传上传知识星球的专题有:
【俄乌战争专题】俄罗斯进攻战役评估-3万字的原文及机器翻译-今年4月和8月的评估报告;
【空空导弹专题】探索空对空导弹的世界:综合指南-涉及13份技术资料超5万字干货;
【朝鲜导弹专题】朝鲜的导弹试验情况-涉及90份资料-超过150万字的干货;
【美国海岸警卫队专题】美国海岸警卫队组织框架-涉及18份技术文件-超30万字
【导弹技术专题】三叉戟 II D-5 (UGM-133A)系统技术介绍-含34份技术资料-超20万字
【高端战争专题】高端战争的作战理论及战术介绍-涉及30份技术文档-含69万字干货
【好书籍专题】美国国防系统的作战优势-共450页,超过5万字的干货
【伊朗导弹专题】伊朗法塔赫Fattah系列高超音速巡航导弹技术研究-含17份文档-超过3万字技术资料
【无人机作战专题】无人机集群作战技术-共计80余份技术资料(超过100万字)
【专题】未来战争的形态介绍-共700余页-共15万字以上的技术资料
【专题】美国空军指令、海军条令、联合作战条令、条例文档简介【资料超过5000页】共计74份文件
【专题】精确打击-未来的精确制导弹药-含15份技术资料-超10万字
【兵棋推演专题】兵棋推演手册【51份兵棋推演的好资料,搜罗全网好资料】-超80万字
【专题报告】米切尔航空航天研究所 专题技术报告-含10份-超20万字报告
【核武专题】加速走向不稳定?高超音速武器和核使用的风险-涉及核武系统技术报告53份-超100万字干货
【多域作战专题】多域作战专题技术报告-多域集成:揭开神秘面纱-含101份技术报告-超200万字技术报告
【马赛克战争专题】马赛克战争技术研究报告-含42分技术报告-超100万字技术干货
【电子战专题】电子战技术专题报告-含42份技术报告-超130万字干货
【认知战专题】认知战系列技术介绍-含40份资料-超80万字干货
【顶级大学-约翰霍布金斯大学导弹文章】彻底改变打击和空战的艺术 -绝好资料推荐含17份技术报告-50万字干货
【资料合集】最新美国海军技术报告-53份技术报告-超100万字
【高超音速导弹专题】高超音速导弹武器技术专题技术报告-包括138份关于高超音速导弹武器系统最近几年最新的技术报告,包括机器翻译的技术资料-超过500万字绝对干货
相关资料文档资料已经上传知识星球:
该星球用于分享技术、情报和军事类的技术知识,目前该知识星球已有5000份文档了和各类技术分享,后续每天都会有不同的技术资料分享,如果有需要的可以扫知识星球的码加入,内容很丰富,包含雷达技术文档、智能仿真代码,包括无人机蜂群代码等,及其他雷达技术仿真代码、武器系统技术、技术情报、武器分系统技术等知识.


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
