导读:全球卫星导航系统(GNSS)与捷联惯性导航系统(SINS)具有天然的优势互补性,两者组合后可形成全球厘米级高精度定位定姿系统(POS),是空间移动基准、参考真值系统的核心技术,已成为全球地理信息采集、全域空间信息感知、无人系统自主运动的基础性配置。加拿大Applanix公司POSAV 620代表了当前商用POS系统的最高水平,而以POSPac和Inertial Explorer为代表的进口商业软件,长期垄断国内外市场。随着我国北斗芯片与惯性器件的技术突破,组合导航硬件可以摆脱国外产品限制,而定位定姿软件系统成为关键。为此,团队在原有自主研制的精密定位定姿软件系统POSMind基础上,进一步融入最新研究成果与先进技术,以期逐步实现下一代定位定姿系统的全新升级。GNSS/SINS融合后处理可以生成高精度、高频次的全局位姿信息,维持着整个移动测量过程中的坐标系统,使得各类地理信息直接表达在全局坐标系下,实现无控制测绘。当前,主流商业软件(如IE)普遍采用“卡尔曼滤波+RTS平滑+正反向融合”的后处理框架,但在复杂环境下仍然存在精度不足的工程实际问题。因此,团队探索了滑窗数据优化、基函数运动重建、观测方差智能学习、多轮迭代处理等系列新方法,并以IE软件作为参考,通过大量实测数据对比验证新方法在定位定姿精度提升上的优势。
“Satellite Navigation2026-青年科学家研讨会于2026年3月27-28日在北京市召开。本文为团队成员吕嘉睿博士的成果分享,介绍了PLANET团队在北斗/多源融合智能导航方面的科研
精密定位定姿技术主要应用于移动测量的高精度空间基准维持,通过集成定位定姿和测量测图传感器,叠加空间基准信息与精准测绘信息,完成现实世界向数字世界的映射。
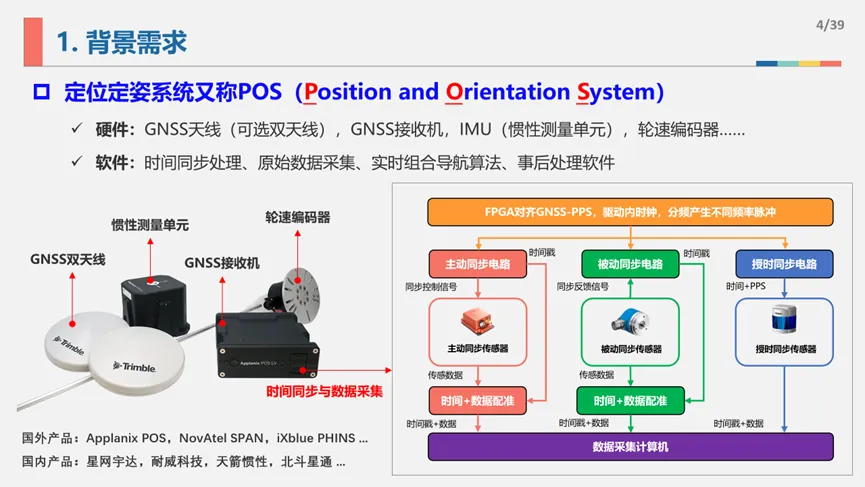
定位定姿系统又称为POS系统,由GNSS天线、接收机、IMU、轮速编码器等设备构成,通过时间同步,将各类数据采集下来进行后处理,得到高精度的位置和姿态信息。

对于移动测量应用来说,位置精度要求厘米到分米级,而姿态精度可以使用误差公式 𝑥=𝜌sin𝛼=𝜌∙𝛿𝛼 进行概算,当目标点位精度确定的前提下,测量距离越远,姿态精度要求就越高。
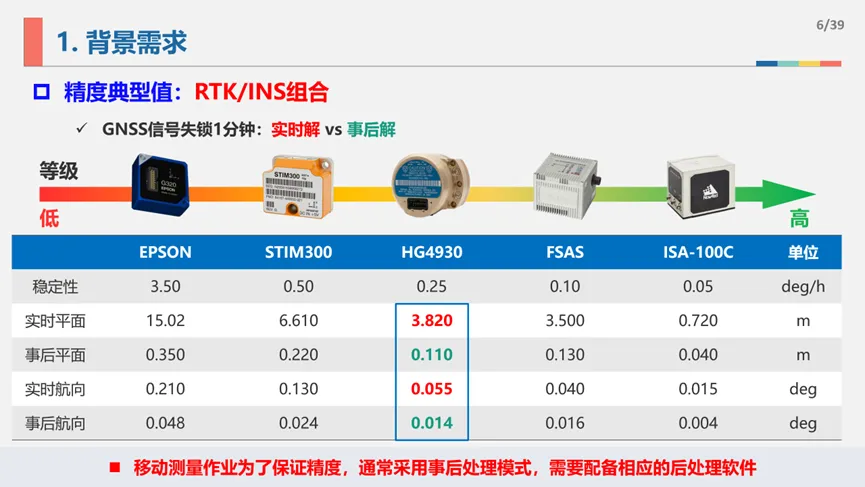
这里展示了五款不同等级惯导在GNSS信号失锁1分钟条件下的实时解和事后解,可以看到事后处理可以大幅度提升位姿精度,因此移动测量作业为了保证精度,通常采用事后处理模式,因此需要配备相应的后处理软件。
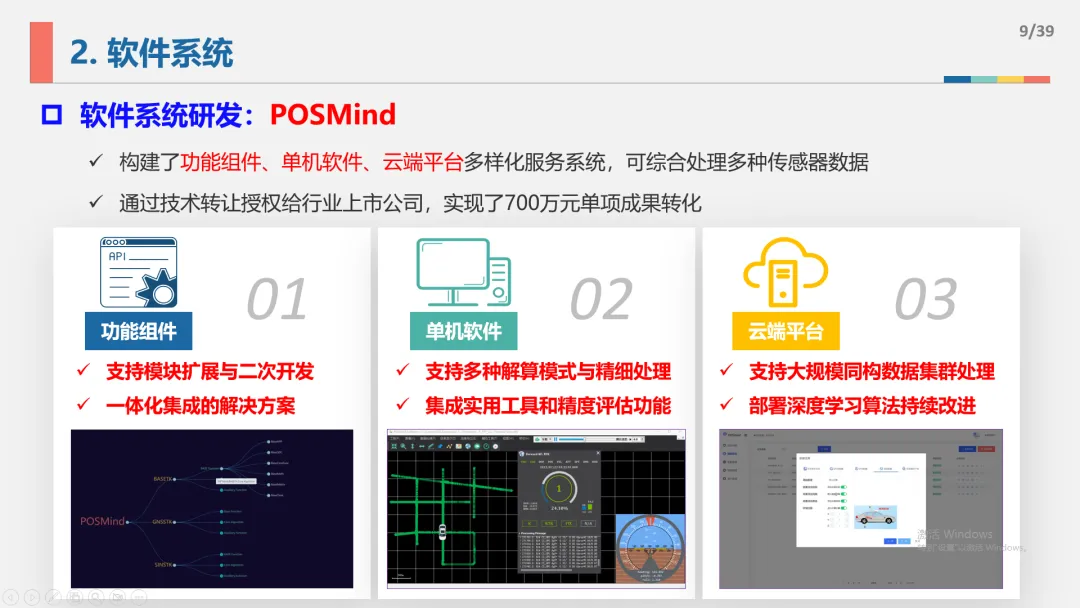
当前,后处理软件以POSPac和IE为主,占据了国内大部分应用市场,但是无法实现自主可控,国产软件迫切需要进一步发展并超越。为此,团队开发了精密定位定姿软件POSMind。

POSMind软件系统包含功能组件、单机软件、云端平台等多样化服务模式,可综合处理多种传感器数据。已通过技术转让授权给行业上市公司,实现了700万元单项成果转化。此外,团队在Kaggle网站上开源了一批组合导航数据(https://www.kaggle.com/datasets/fengzhusgg/smartpnt-pos),已经有很多研究团队都在使用,里面包含不同场景、不同惯导的数据,同时提供了参考真值。另外,网站上会定期更新POSMind软件许可,并逐步增加多样化数据集,供广大学者使用,当然请大家引用上文章或者网站地址。

目前,POSMind软件系统已应用于高精地图生产、实景三维模型构建、航空重力测量、高铁轨道检测、天绘卫星测姿、自动驾驶参考真值验证等工程应用领域,在多个单位实现了国产化替代,产生了显著的经济价值和社会效益。
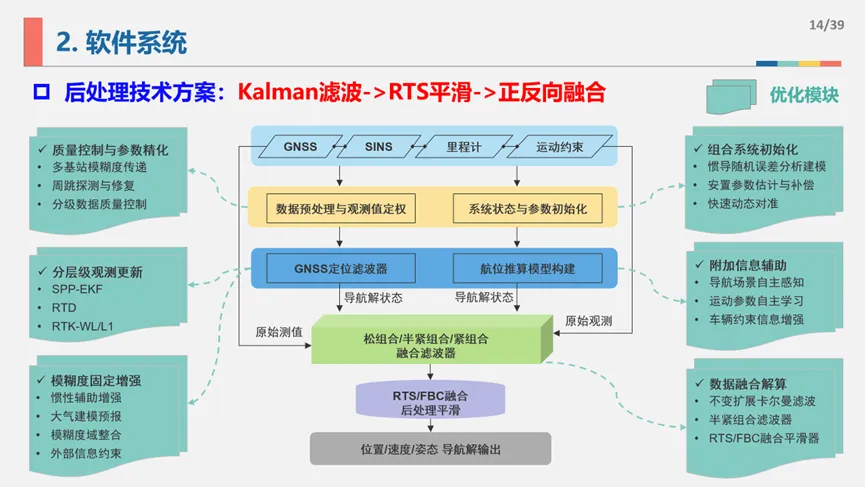
整个软件系统采用当前主流的后处理技术方案,即卡尔曼滤波加RTS平滑,再进行正反向融合处理,IE软件也同样基于这一框架。在此基础上,系统集成了一些优化模块以增强处理性能。但在复杂场景下,该方案仍面临诸多挑战,如何进一步提升定位定姿性能,一直是团队持续探索的研究方向。
首先,以单历元数据进行观测更新的Kalman滤波,在抗差能力上存在局限性。复杂环境下,当前历元所有卫星数据都会受到影响,导致可用观测卫星少,方程结构弱,以时间方向进行递推更新的Kalman滤波,无法享受到后续高质量观测信息的红利,因此,当前历元的抗差能力弱,未被探测出来的粗差将被状态估值吸收,影响后续定位解算。
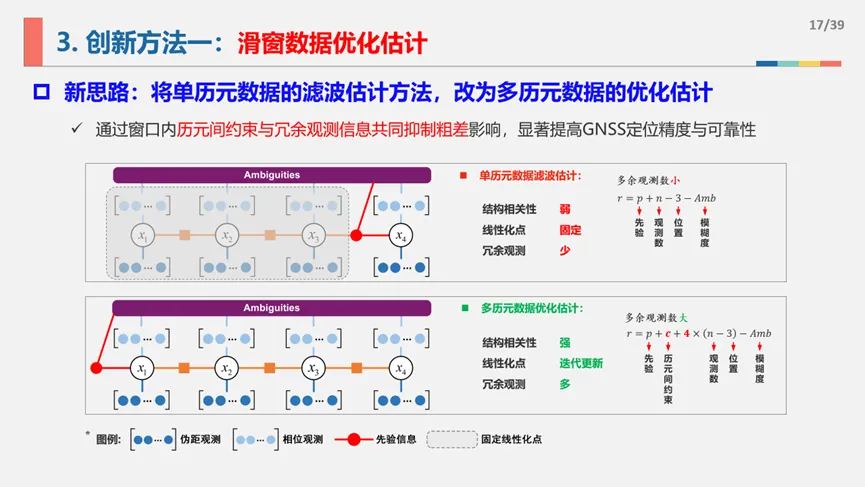
新思路是将单历元数据的滤波估计方法,改为多历元数据的优化估计,通过窗口内历元间约束与冗余观测信息共同抑制粗差影响,显著提高GNSS定位精度与可靠性。
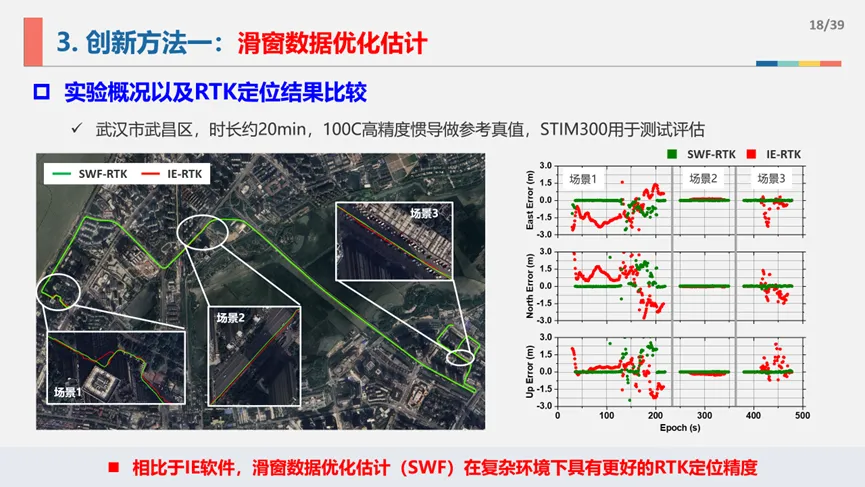
在武汉市武昌区复杂城市环境下进行了实验,其中100C高精度惯导通过后处理做参考真值,STIM300用于测试评估。可以看到,滑窗数据优化估计在复杂环境下具有更好的RTK定位精度。
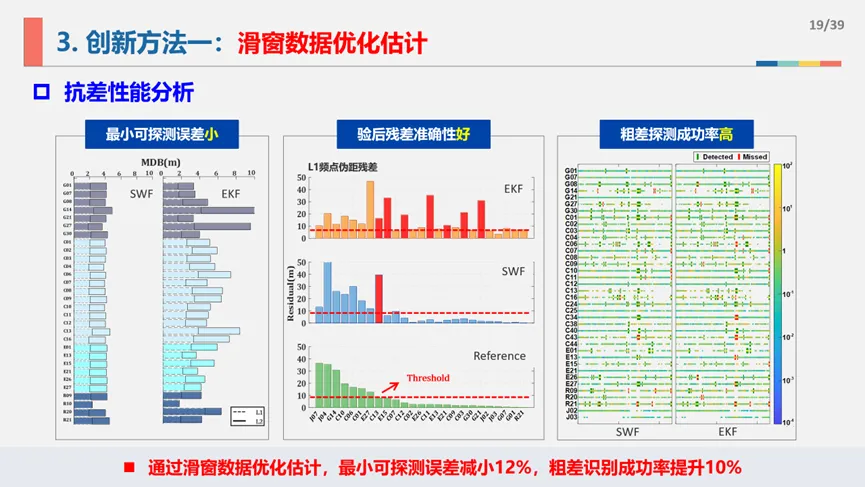
同时进行了抗差性能分析,结果表明,通过滑窗数据优化估计,最小可探测误差减小12%,粗差识别成功率提升10%。因此,系统在复杂环境下具备较好的抗差能力。
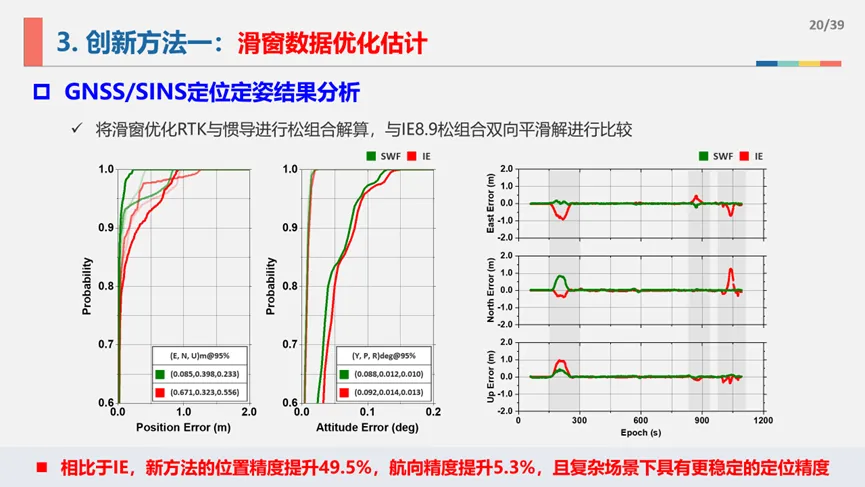
在此基础上,将滑窗优化RTK与惯导进行松组合解算,与IE8.9松组合双向平滑解进行比较,新方法的位置精度提升49.5%,航向精度提升5.3%,且复杂场景下具有更稳定的定位精度。
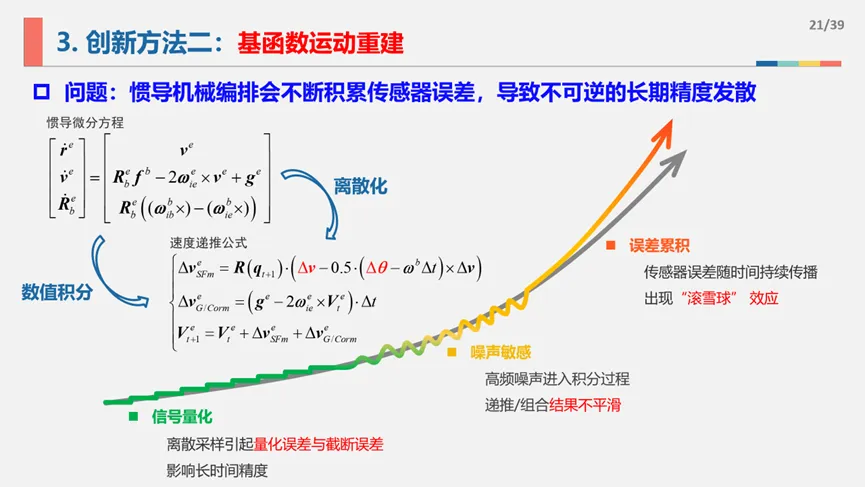
第二,惯导机械编排会不断积累传感器误差,导致不可逆的长期精度发散。其中信号量化、噪声敏感、误差累积是现有惯导机械编排方法无法克服的难题。
新思路是,通过基函数重建惯导运动轨迹,利用惯导离散数据反求轨迹参数。具体而言,使用时间样条函数分别拟合位置轨迹和姿态轨迹,通过二阶求导建立与惯导加速度观测的函数方程,通过一阶求导建立与惯导角速度观测的函数方程。
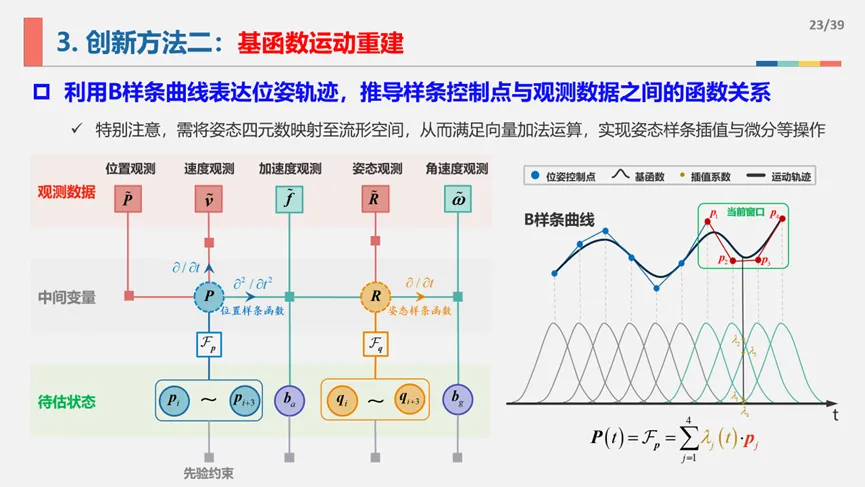
这里采用了B样条曲线来表达位姿轨迹。如果使用松组合模式解算,那么待估状态只有B样条曲线的控制点参数和惯导零偏。这些控制点参数由B样条函数表达成位置连续函数P,这个P求两次导得到加速度,再联合旋转矩阵,惯导加计零偏,就可以建立角速度观测方程,姿态也一样。在联立所有状态和各类观测之间的函数方程后,使用最小二乘优化估计得到所有状态参数。
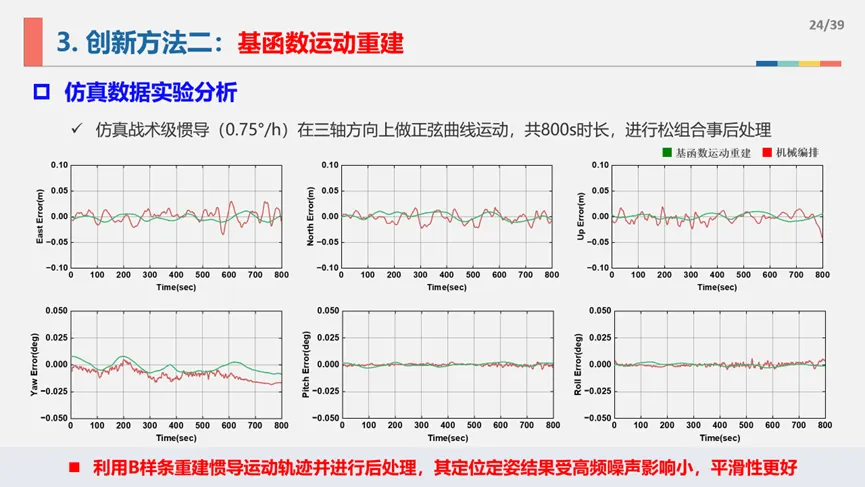
由于模拟仿真可以提供绝对真值,这里仿真了战术级惯导在三轴方向上做正弦曲线运动,共800s时长,进行松组合事后处理,来分析新方法的性能。可以看到,利用B样条重建惯导运动轨迹并进行后处理,其定位定姿结果受高频噪声影响小,平滑性更好。
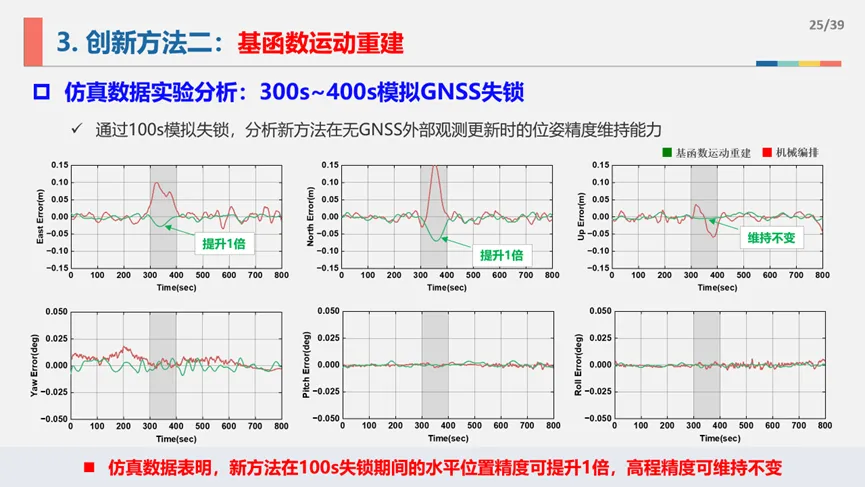
接着,在300s到400s处模拟GNSS失锁,分析新方法在无GNSS外部观测更新时的位姿精度维持能力。仿真数据表明,新方法在100s失锁期间的水平位置精度可提升1倍,高程精度可维持不变,具有较好的精度维持能力。
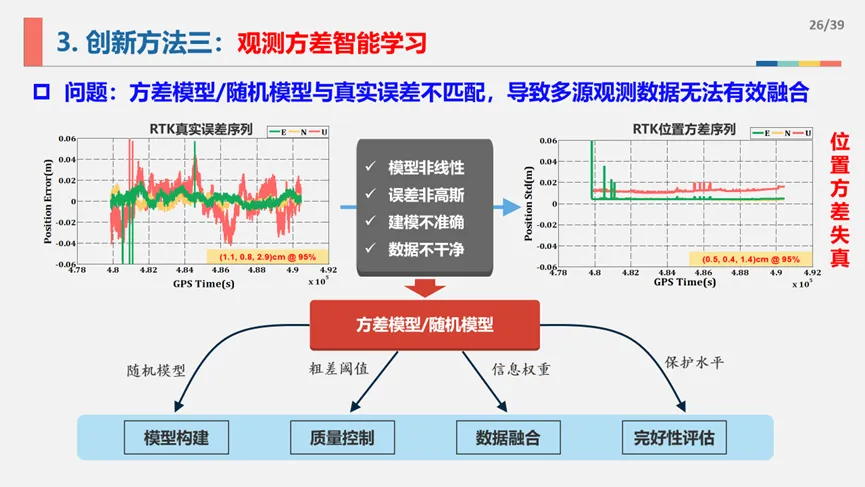
第三,方差模型/随机模型与真实误差不匹配,导致多源观测数据无法有效融合。例如RTK定位方差无法反映其真实误差及其波动情况,出现方差失真现象。这主要来源于模型非线性、误差非高斯、建模不准确、数据不干净等多种因素。

因此,新思路是采用数据驱动方法建立GNSS位置方差自主调整模型。基于移动测量积累的海量同质化数据,通过数据间信息交互共享,实现位置方差的自主训练与学习。得益于移动测量作业中的同构化设备、重复化环境、专业化采集,为深度学习提供了极为丰富的高质量大样本数据。
这里最重要的是解决如何自主生成标签数据,而不依赖外部参考真值系统。新方法是,首先构建质量评价指标优选高质量RTK位置,然后惯导短时高精度航位推算生成参考轨迹,最后利用剩余低精度位置计算真误差生成标签数据。有了标签数据后,通过构建融合注意力机制的CNN-LSTM深度神经网络,学习信噪比、PDOP等多维精度表征因子和位置真误差之间的映射关系。
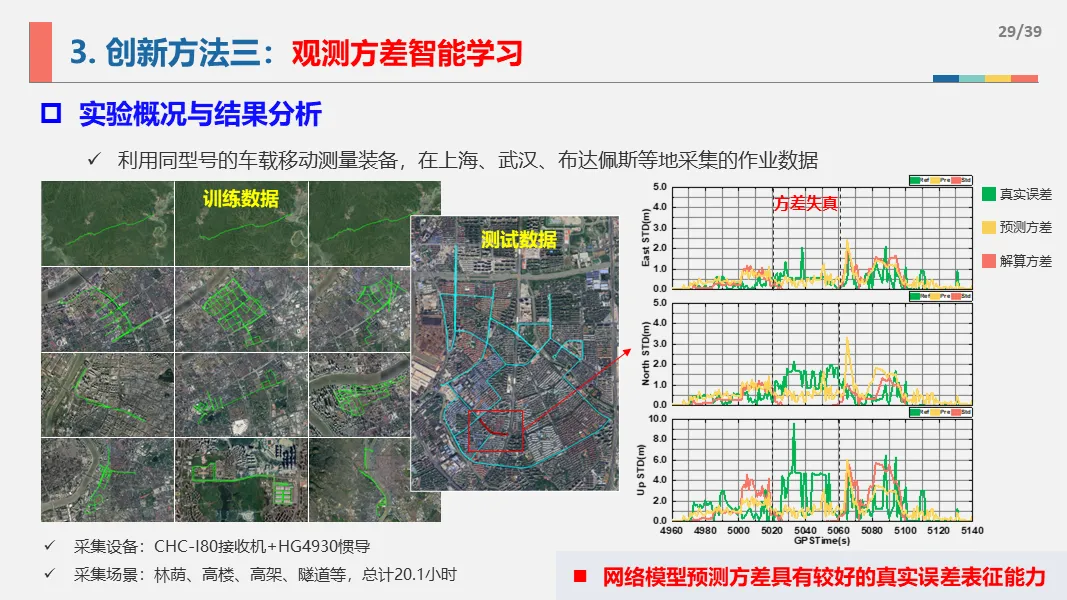
利用同型号的车载移动测量装备,在上海、武汉、布达佩斯等地采集了大量数据作为训练集,其中上海一组作为测试数据。可以看到,黄色的预测方差更加贴合绿色的真实误差,网络模型预测方差具有较好的真实误差表征能力。
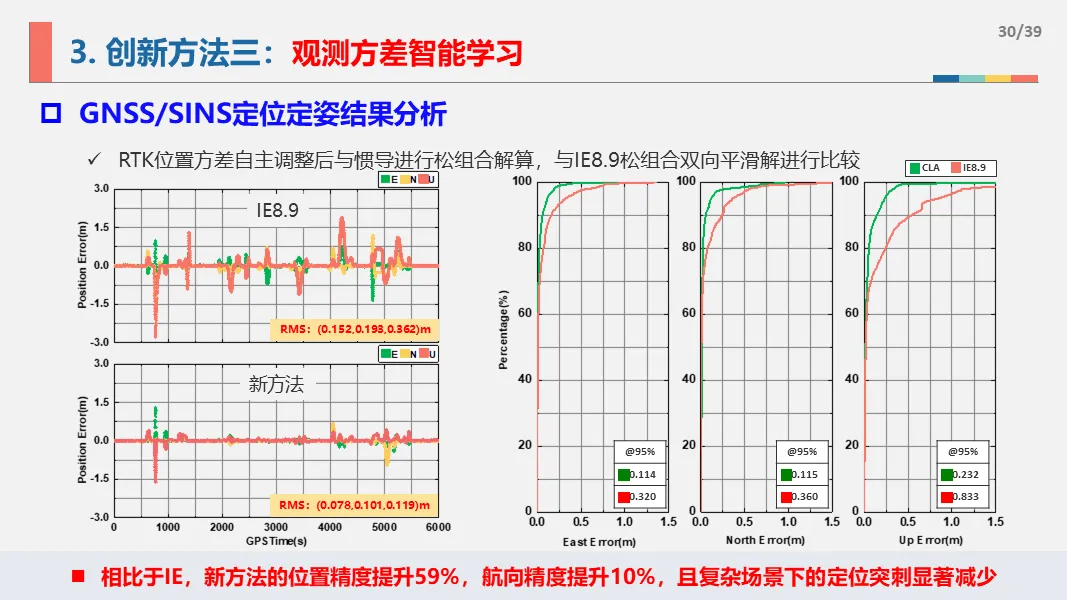
RTK位置方差自主调整后与惯导进行松组合解算,相比于IE,新方法的位置精度提升59%,航向精度提升10%,且复杂场景下的定位突刺显著减少。
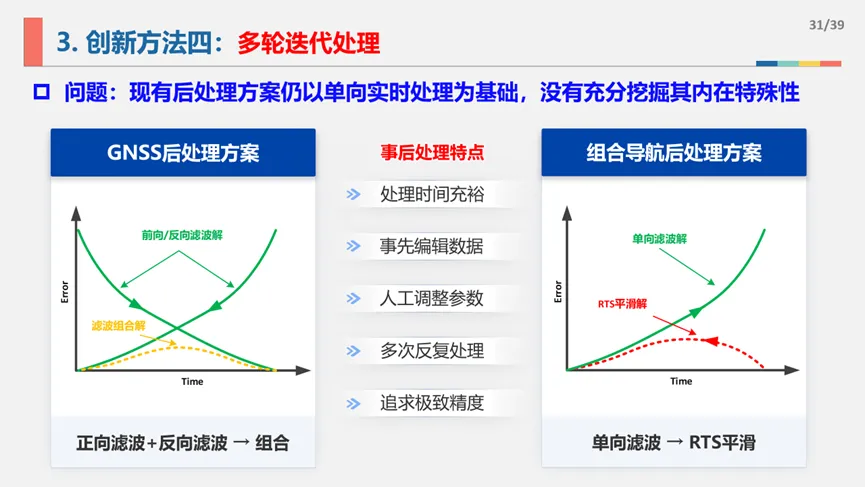
第四,现有后处理方案仍以单向实时处理为基础,没有充分挖掘其内在特殊性,比如事后处理的时间充裕,可以事先编辑数据,人工调整参数,多次反复处理,最终是追求极致的精度,也就是说事后处理,十八般武艺都可以上。
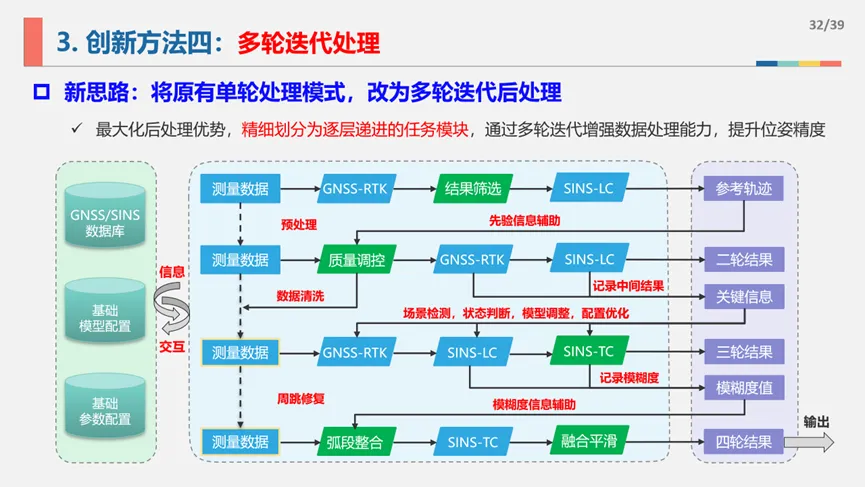
因此,新思路是将原有单轮处理模式,改为多轮迭代后处理,最大化后处理优势,精细划分为逐层递进的任务模块,通过多轮迭代增强数据处理能力,提升位姿精度。比如通过挑选高精度RTK结果进行松组合,生成参考轨迹,可以用来辅助后续数据质量控制,此外,还可以记录所有模糊度信息,然后进行弧段整合,把正确固定的模糊度值赋予整个弧段。
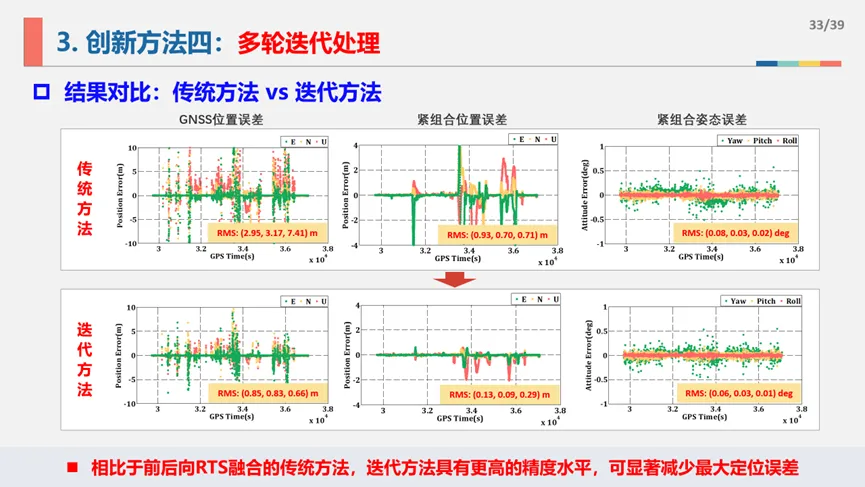
相比于前后向RTS融合的传统方法,迭代方法具有更高的精度水平,可显著减少最大定位误差,无论是GNSS定位解,还是组合导航解,都有明显的精度提升。
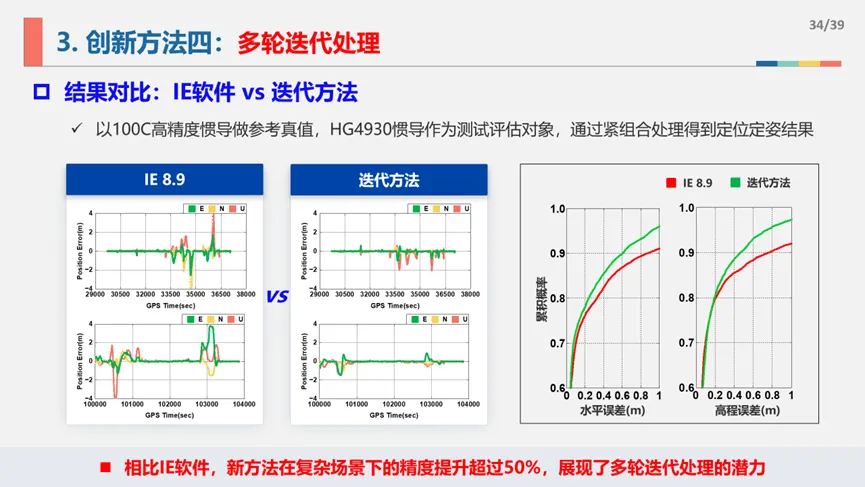
另外,以100C高精度惯导做参考真值,HG4930惯导作为测试评估对象,通过紧组合处理得到定位定姿结果。相比IE软件,新方法在复杂场景下的精度提升超过50%,展现了多轮迭代处理的潜力。
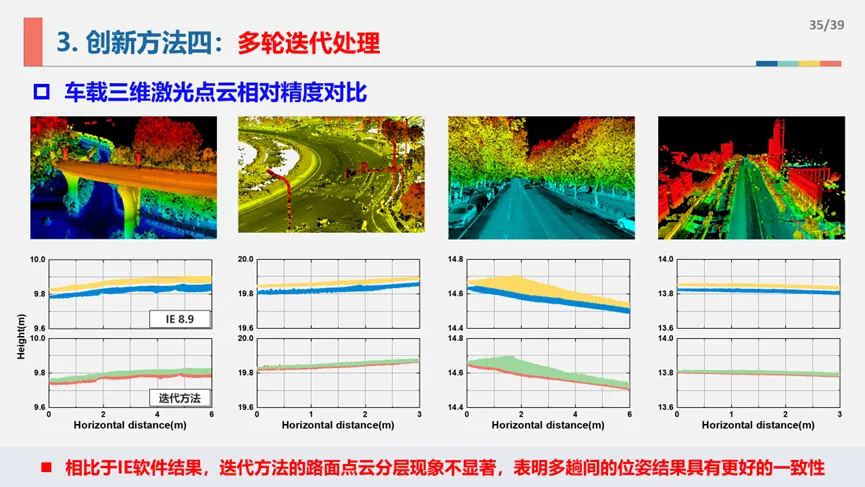
最后,进行车载三维激光点云相对精度对比,迭代方法的路面点云分层现象不显著,表明多趟间的位姿结果具有更好的一致性,从外符合精度检验的角度,验证了新方法的潜力。
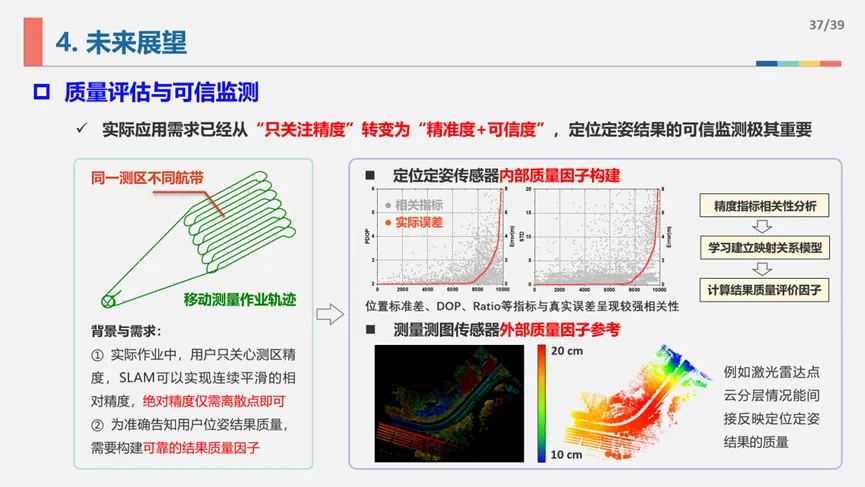
首先,实际应用需求已经从只关注精度转变为精准度+可信度,因此,后处理中的定位定姿结果质量评估与可信监测极其重要。

第二,利用人工智能优化数据处理,在替代经验建模与人工调参部分的工作,具有很大的潜力,如进行导航场景感知、观测数据调控、虚拟信息判断、模型参数学习、处理策略优化和结果质量决策等。
最后,未来能否创建AI智能体,学习人类数据处理经验,实现规模化全自动数据处理。例如通过接入deepseek,可以实现对话式软件处理,这个是最初级的智能体应用,但它能帮助我们降低软件使用难度。
未来,自动驾驶汽车、无人机、无人船、室内移动机器人等都将成为智能测量机器人,全时全域的泛在测绘必将产生更加海量丰富的时空大数据。传统后处理方法多采用人工干预和经验调参来优化结果,容易受到样本不足、环境变化、分析简化等众多因素的影响,不具备泛化和自适应的能力,无法满足批量化、协同化和智能化的处理需求。得益于人工智能技术的迅猛发展,在AI智能体的赋能下,实现大规模定位定姿数据的自动化、集群化处理将成为可能。
[1] Zhu F, Cai Q, Tao X, et al. POSMind: developing a hierarchical GNSS/SINS post-processing service system for precise position and attitude determination[J]. GPS Solutions, 2024, 28(3): 142. https://doi.org/10.1007/s10291-024-01683-x
[2] Zhu F, Chen X, Cai Q, et al. A large-scale diverse GNSS/SINS dataset: Construction, publication, and application[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 1-13. https://doi.org/10.1109/TIM.2024.3488156
[3] Zhu F, Lv J, Chen W, et al. Self-Learning Position Variance Using Crowdsourcing Data for Adaptive GNSS/SINS Integrated Navigation[J]. IEEE Transactions on Intelligent Transportation Systems, 2025. https://doi.org/10.1109/TITS.2025.3576987
[4] Cheng J, Zhu F, Hu J, et al. Enhance Pose Accuracy of GNSS/INS Integration by Fusing LiDAR Structure Features Based on Continuous-Time State Representation[J]. IEEE Robotics and Automation Letters, 2025. https://doi.org/10.1109/LRA.2025.3597859