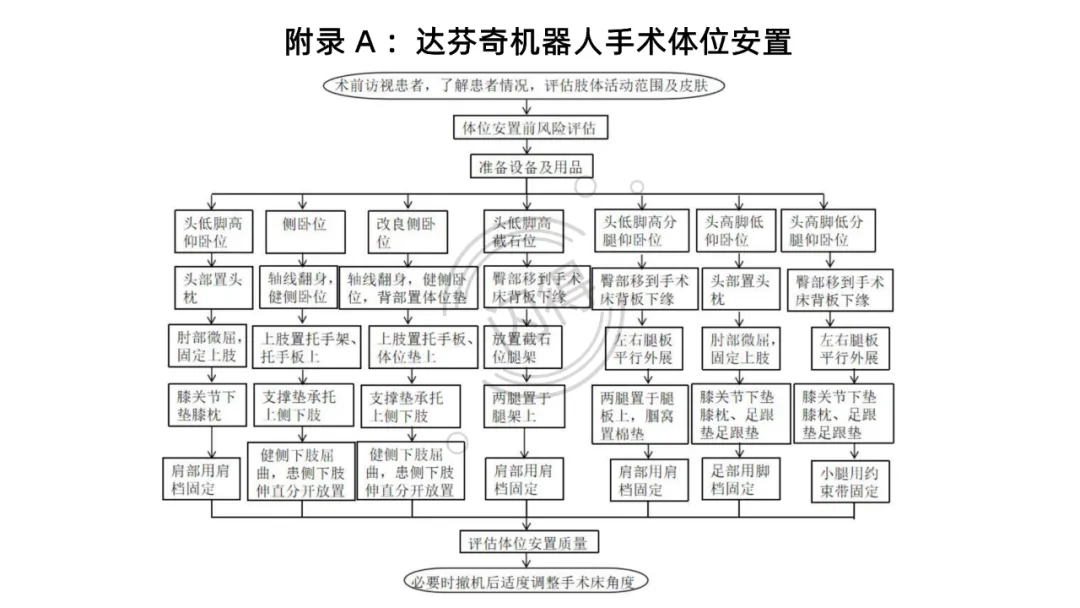
随着达芬奇机器人手术系统在临床的广泛应用,为确保手术安全、规范操作流程、降低体位相关并发症风险,中国研究型医院学会于2024年正式发布了团体标准《达芬奇机器人手术体位安置》(标准编号:T/CRHA 070—2024),并于2024年8月10日起实施。
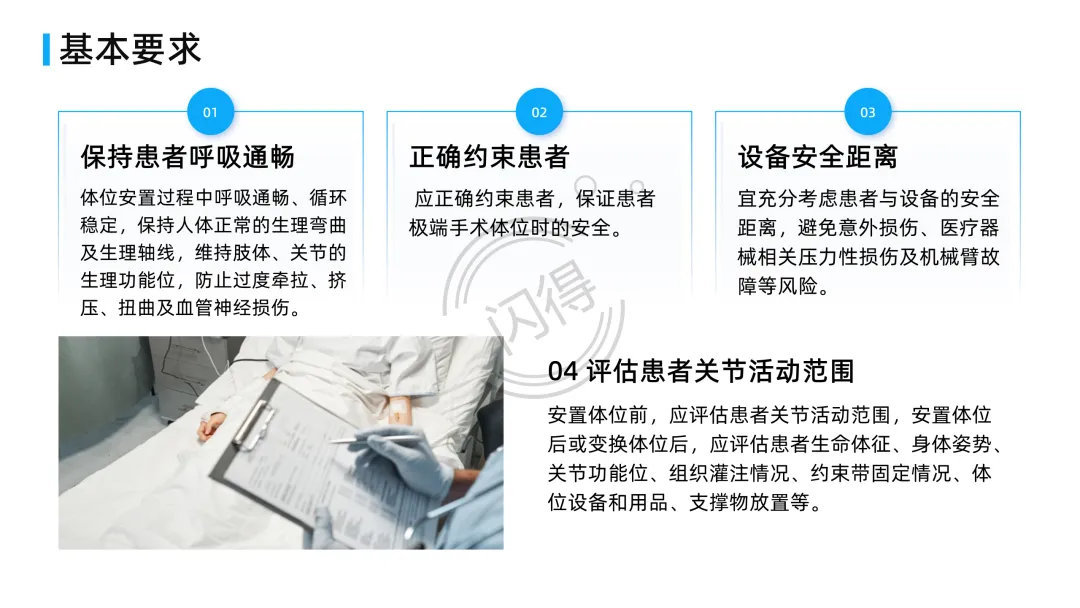
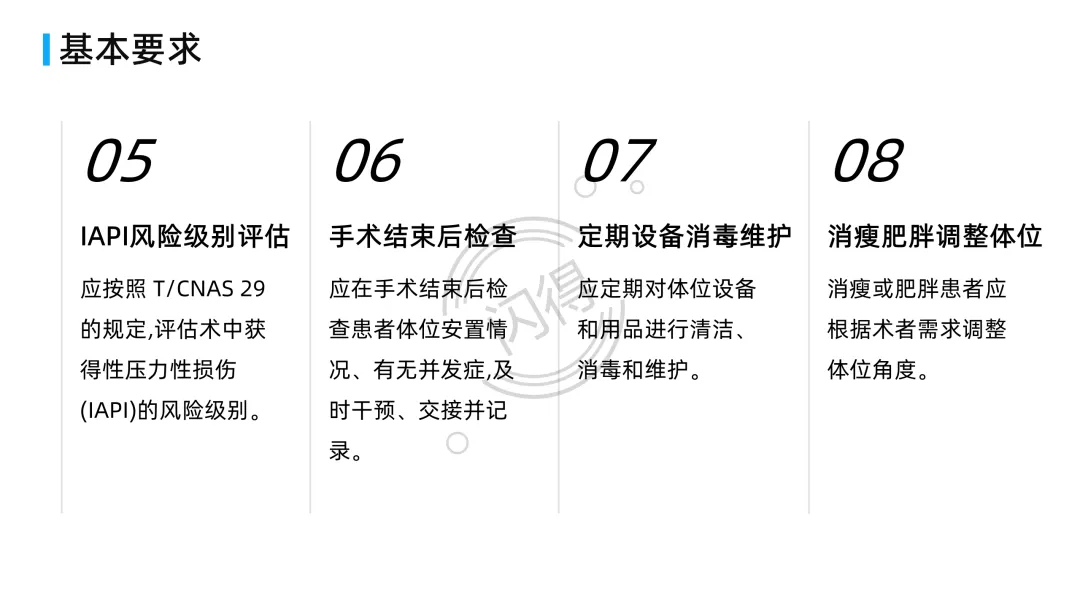
该标准由国内多家顶尖医疗机构的专家共同起草,旨在为各级医疗机构从事机器人手术的医护人员提供统一的、标准化的体位安置指导。标准的核心内容涵盖了成人达芬奇机器人手术体位的基本要求、评估方法、具体安置要求以及并发症的预防措施。
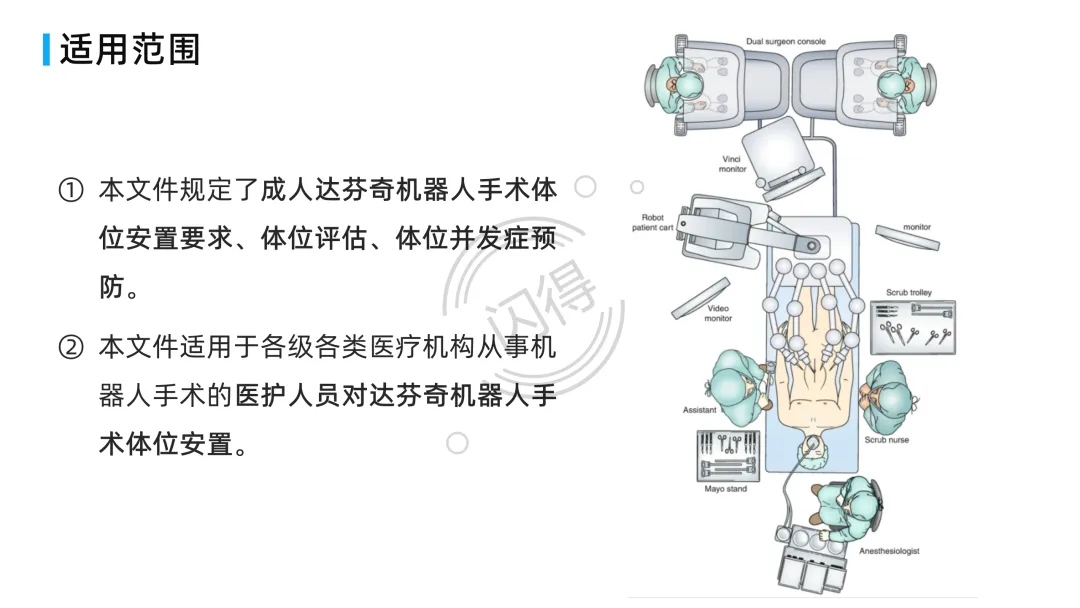
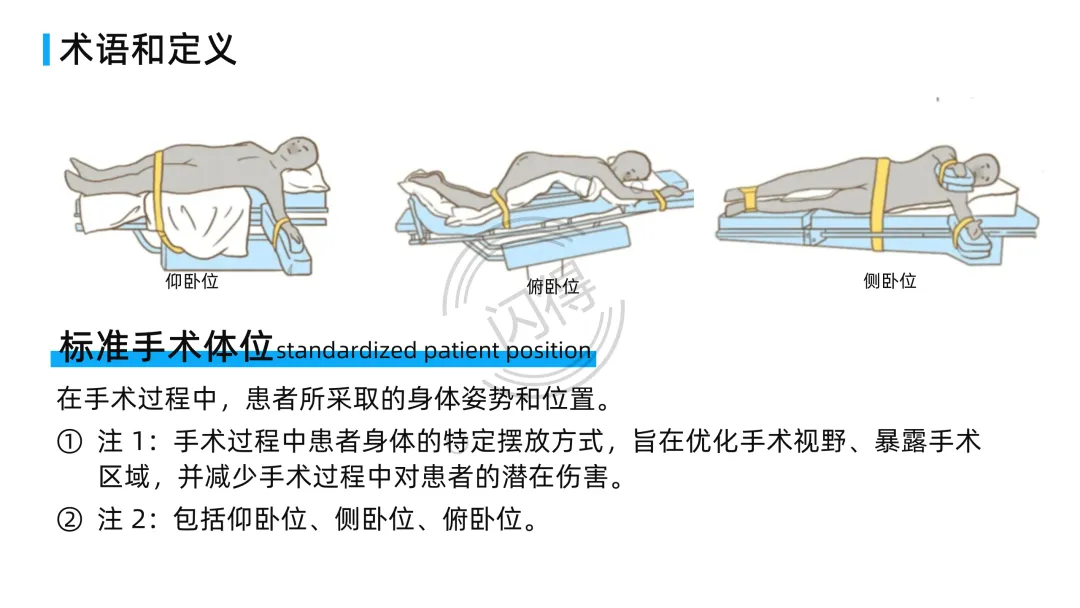
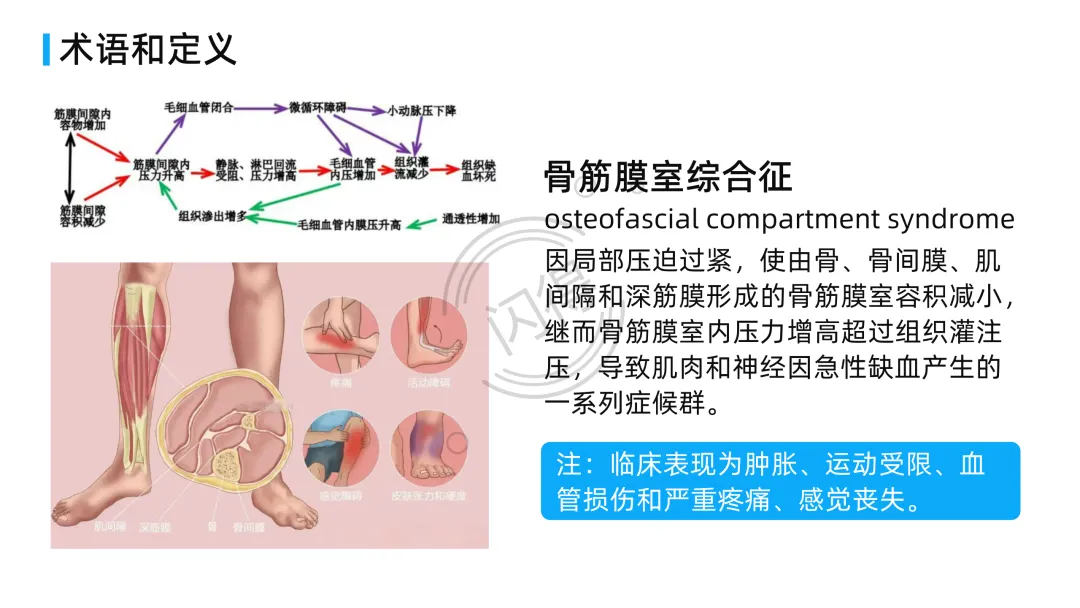
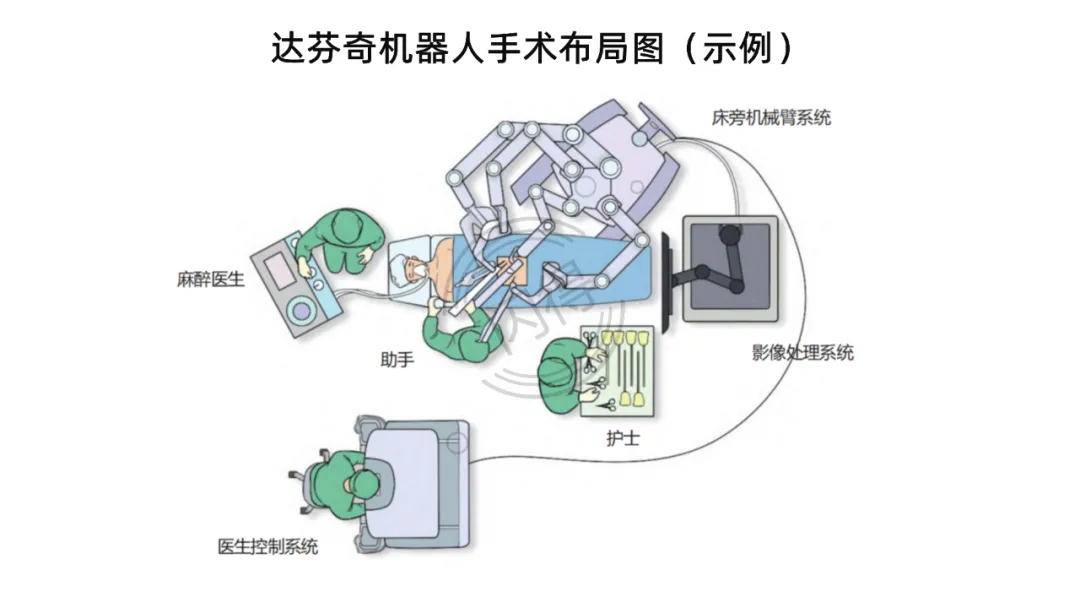
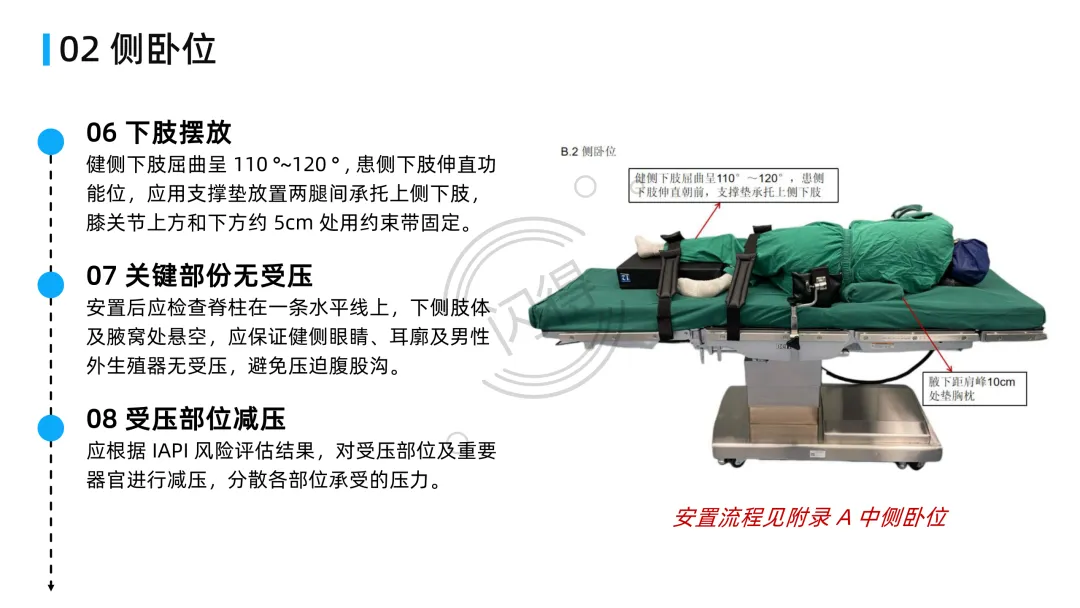
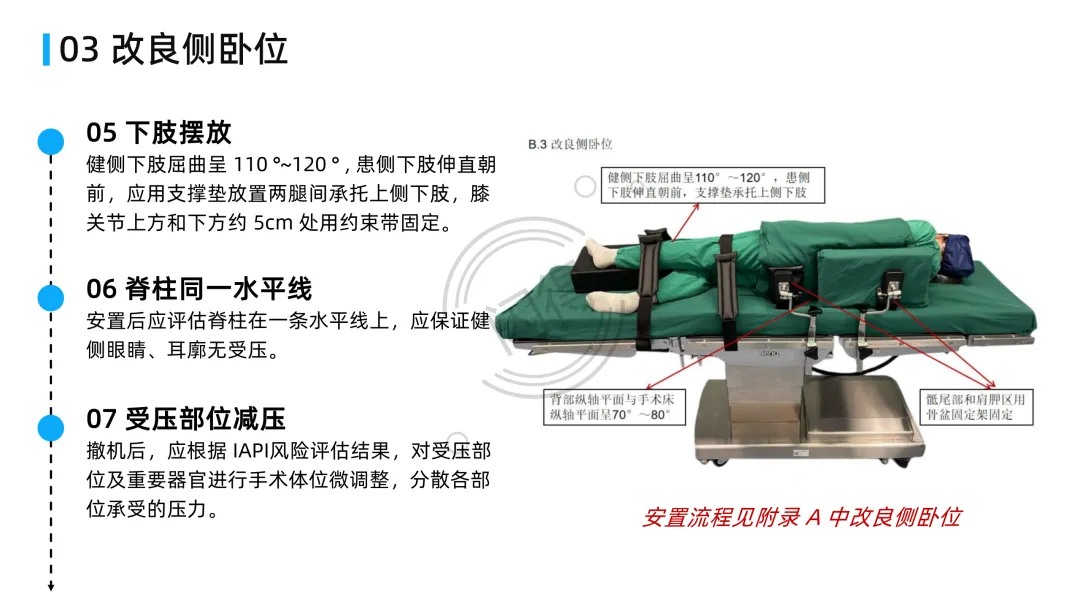
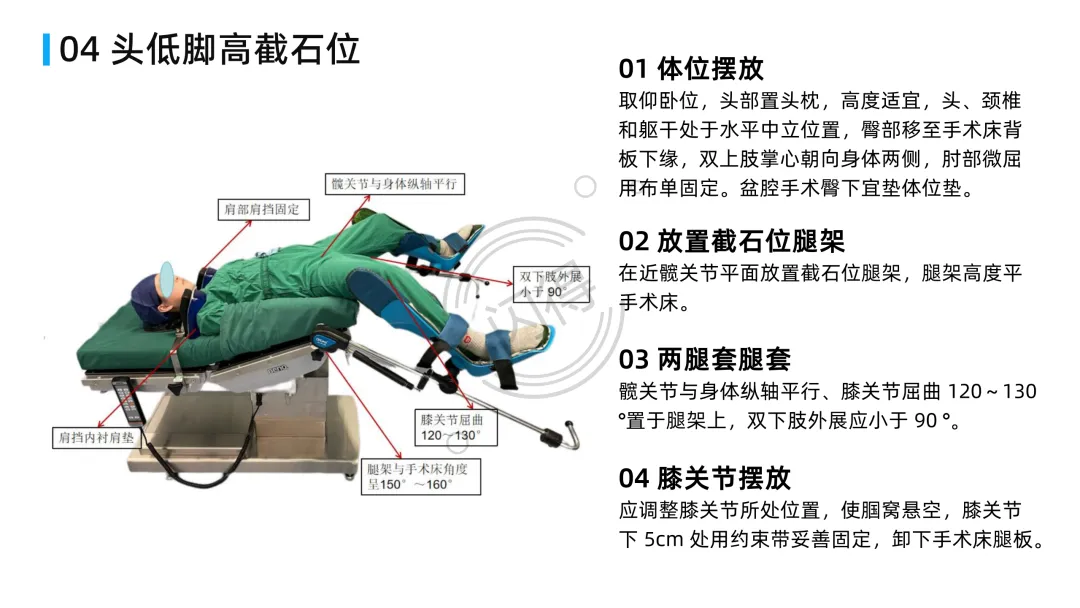
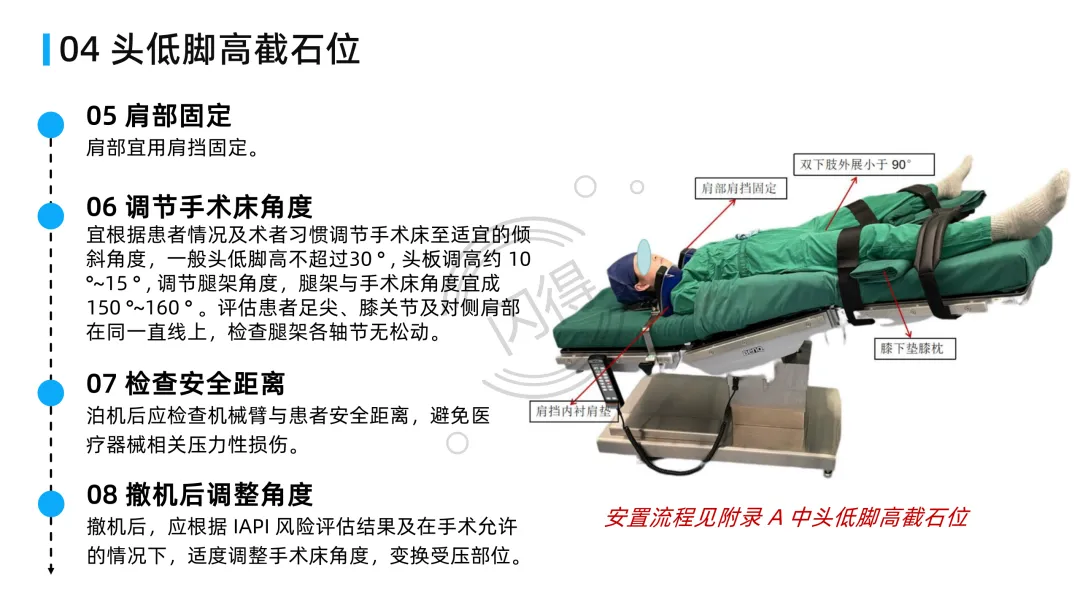
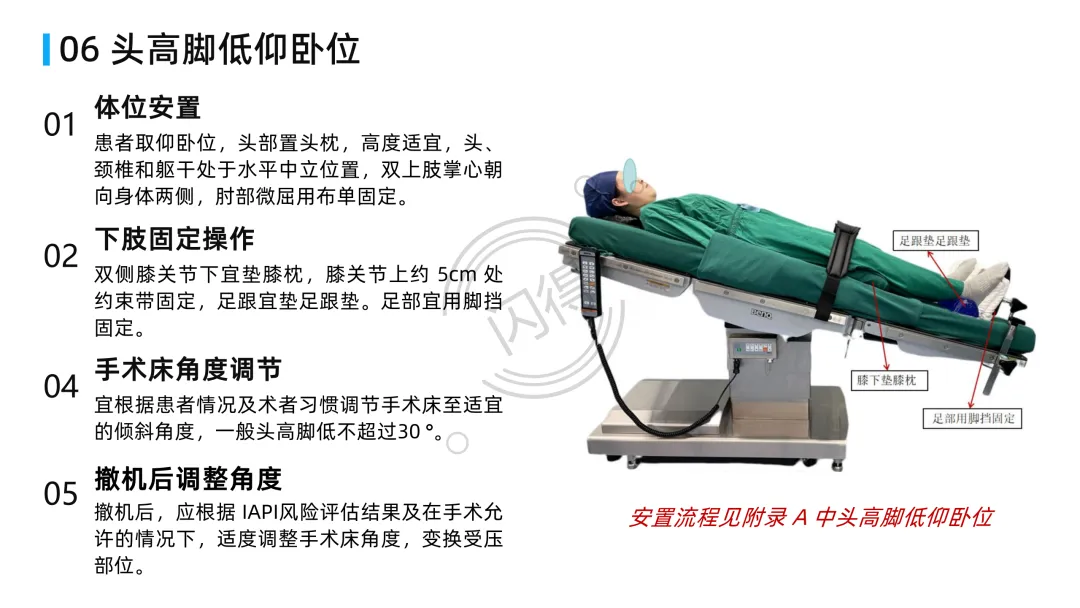
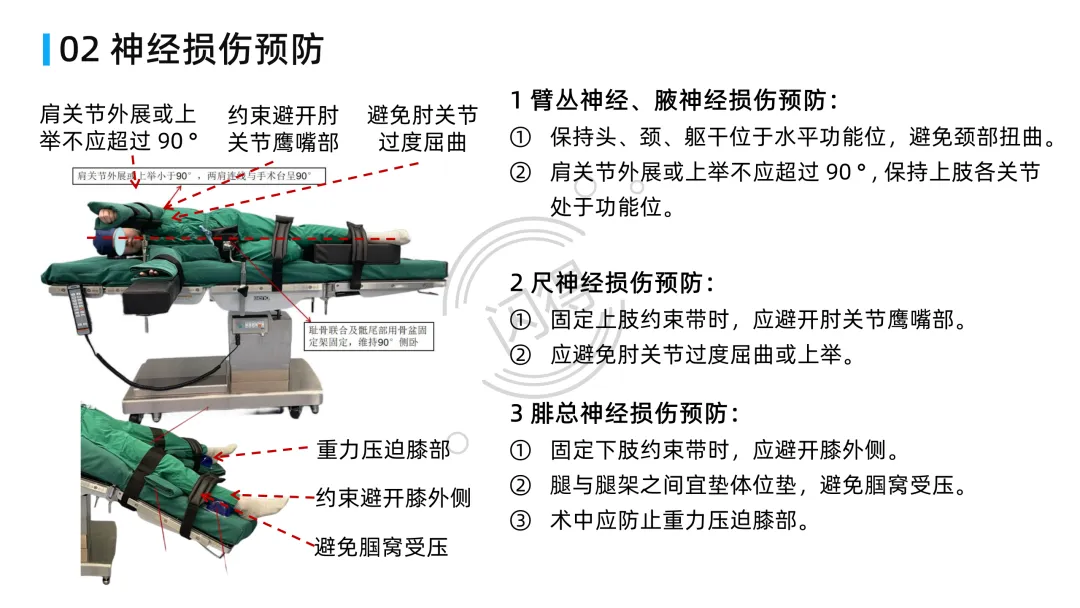
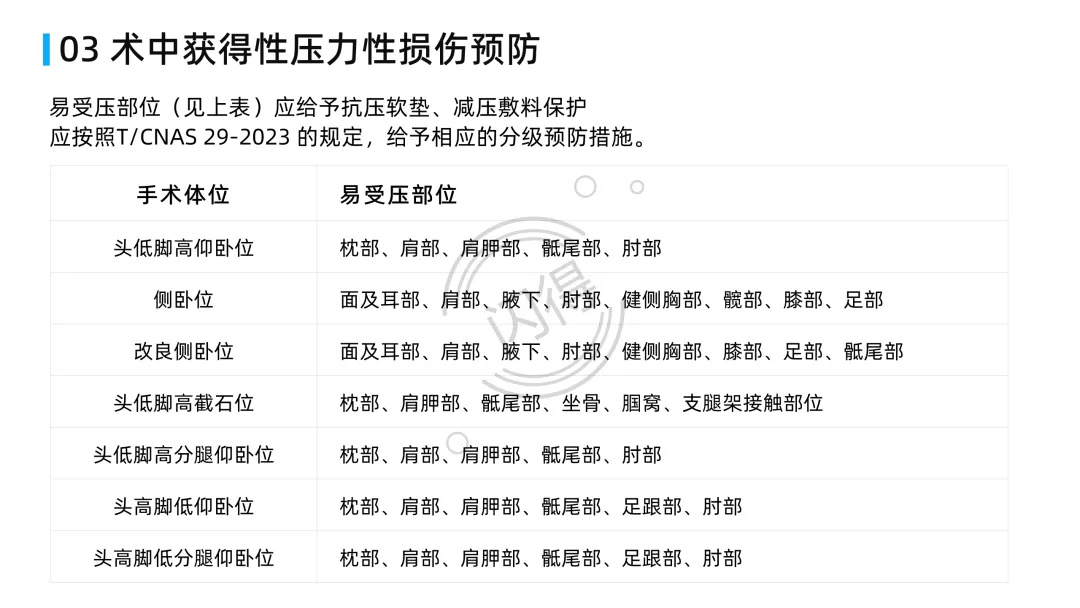
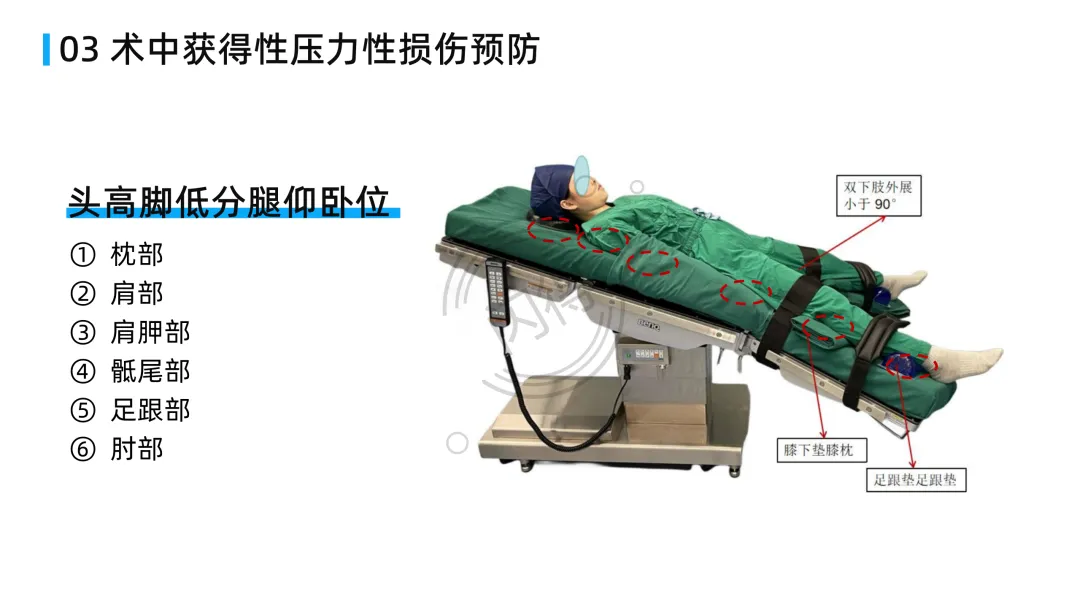
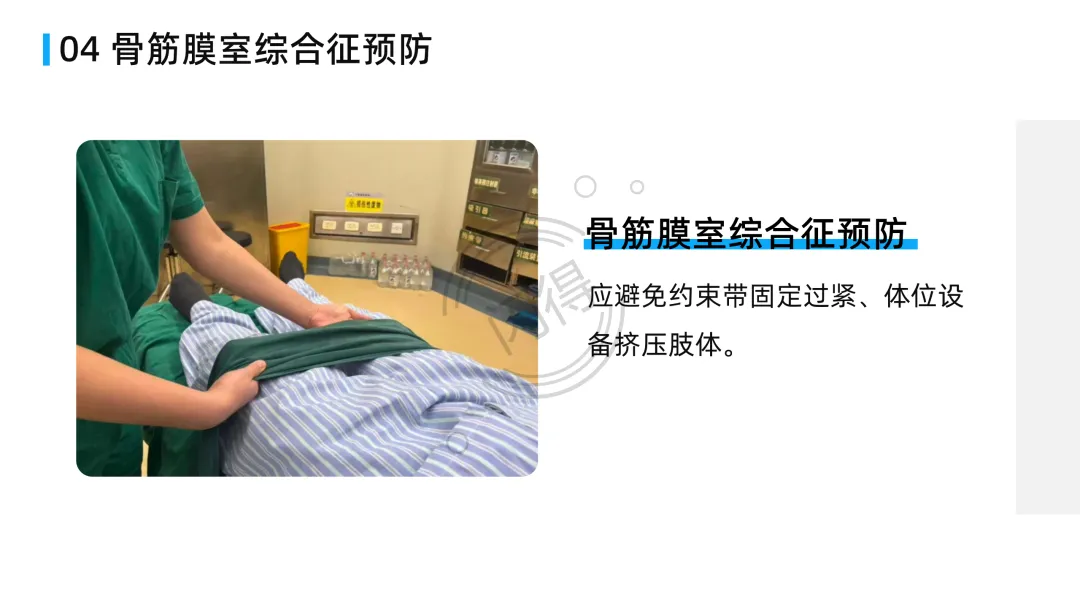
制定背景源于机器人手术的特殊性:相较于传统手术,机器人手术常需要患者处于特殊体位(如头低足高的陡峭特伦德伦伯卧位),并长时间固定,这增加了患者发生压力性损伤、神经血管损伤以及因体位导致的呼吸、循环系统生理紊乱的风险。同时,机器人手术臂的对接和操作也对患者体位的稳定性与精确度提出了更高要求,不恰当的体位安置可能影响手术视野、导致机械臂碰撞,甚至造成患者伤害。
该规范的出台填补了国内在机器人手术体位管理专项标准上的空白,通过提供科学、具体的技术规范,帮助手术团队最大限度地暴露手术野、保障患者安全,并提升机器人手术的整体质量和效率。