本期分享机械控制工程基础经典课件,资料共280页,篇幅较长,这里仅分享部分供读者参考,完整文档获取方式见文末。一、基本概念
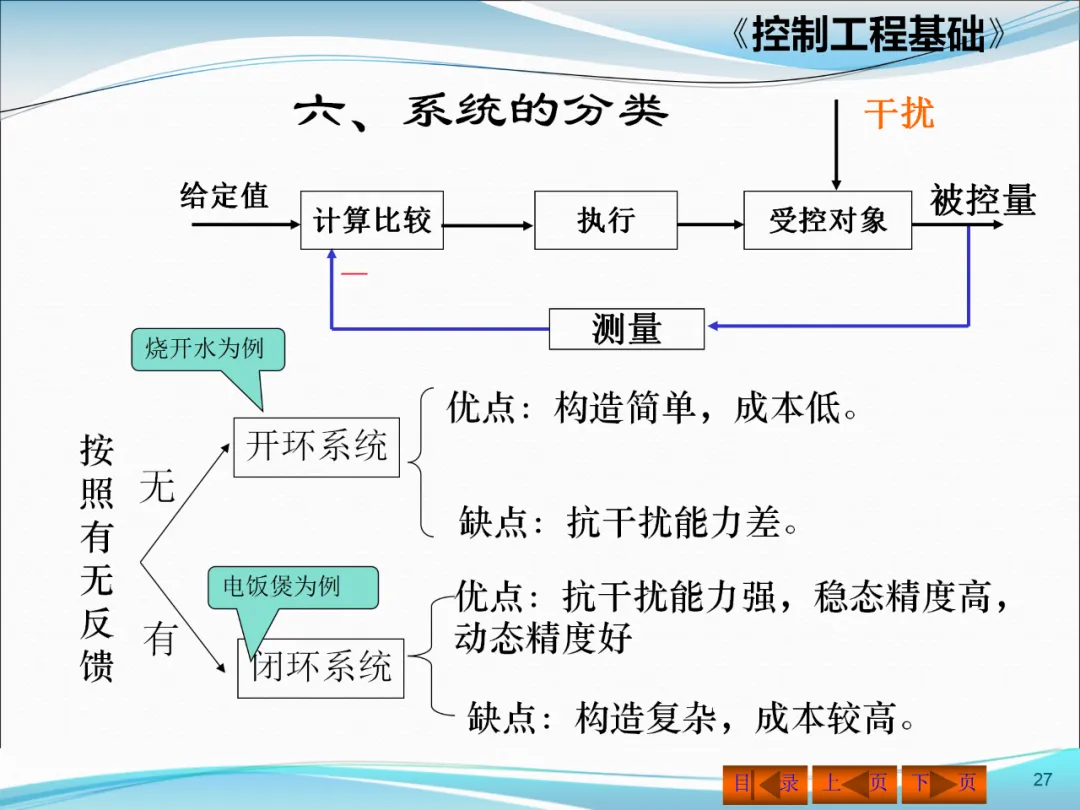
控制论的中心思想是通过信息的传递、加工处理和反馈来进行控制。系统可分为开环与闭环两大类:
①开环系统结构简单、无稳定性问题但精度低;
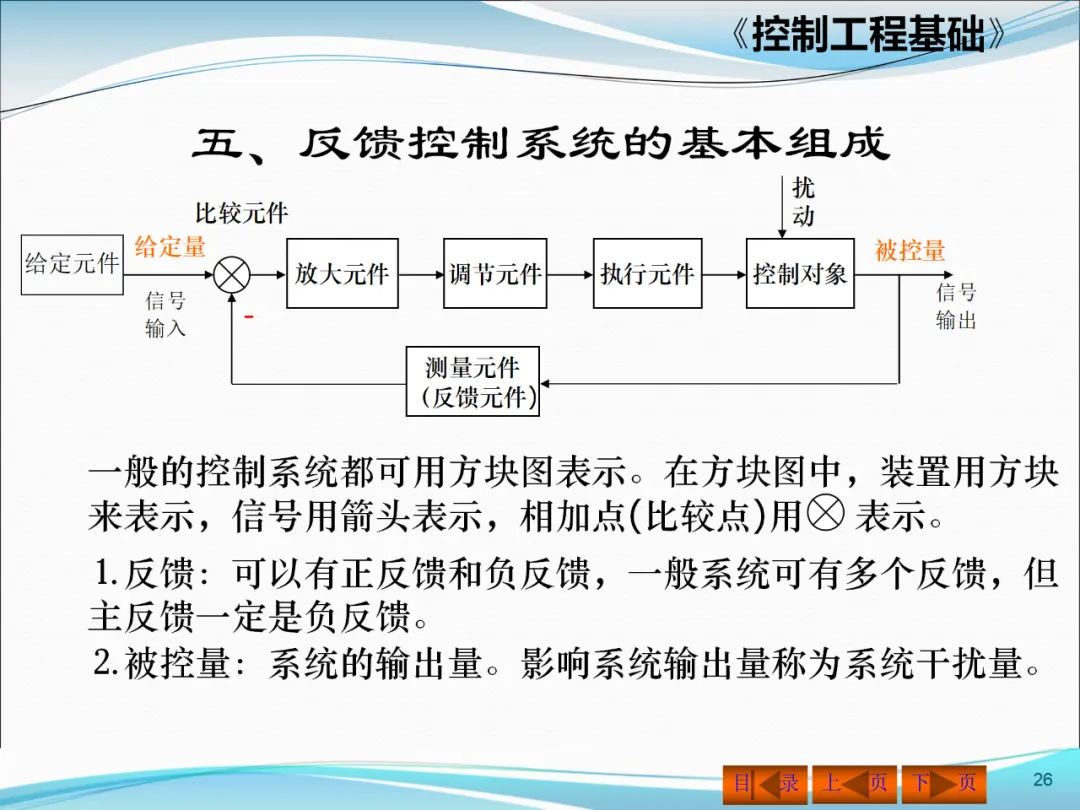
②闭环系统(反馈系统)通过检测输出与输入的偏差进行控制,精度高但存在稳定性问题,其基本组成包括给定、比较、控制、执行和反馈环节。对控制系统的基本要求是稳定性、快速性和准确性。
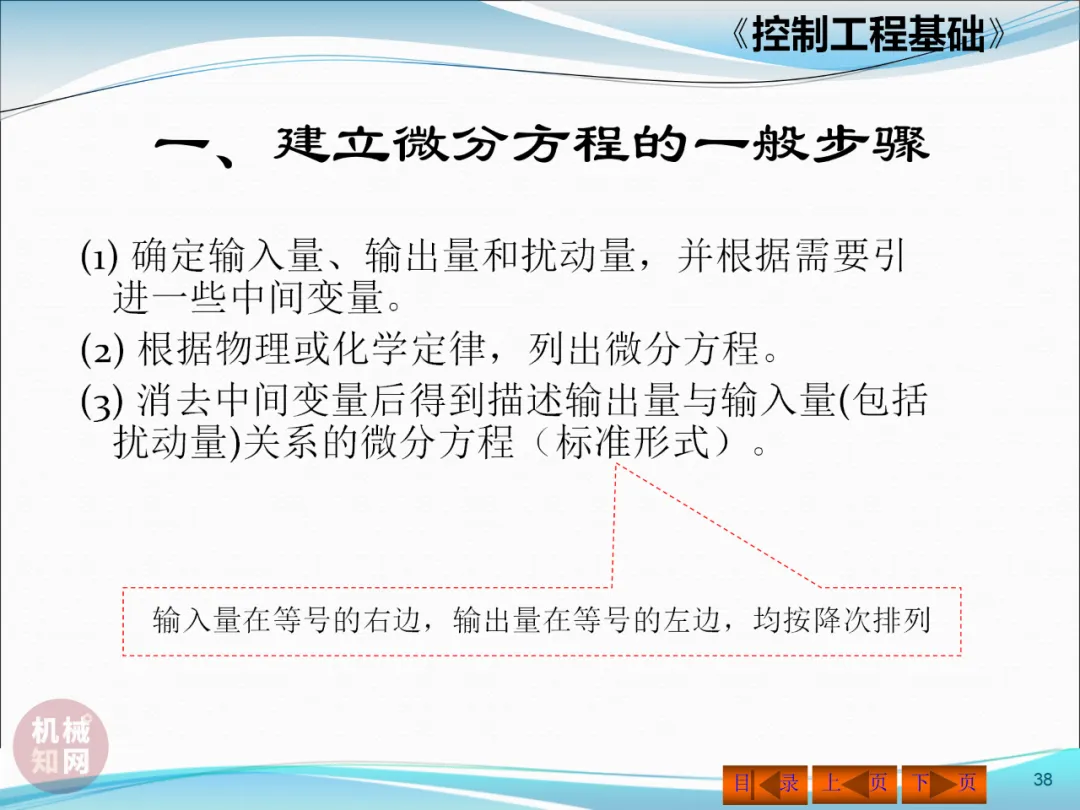
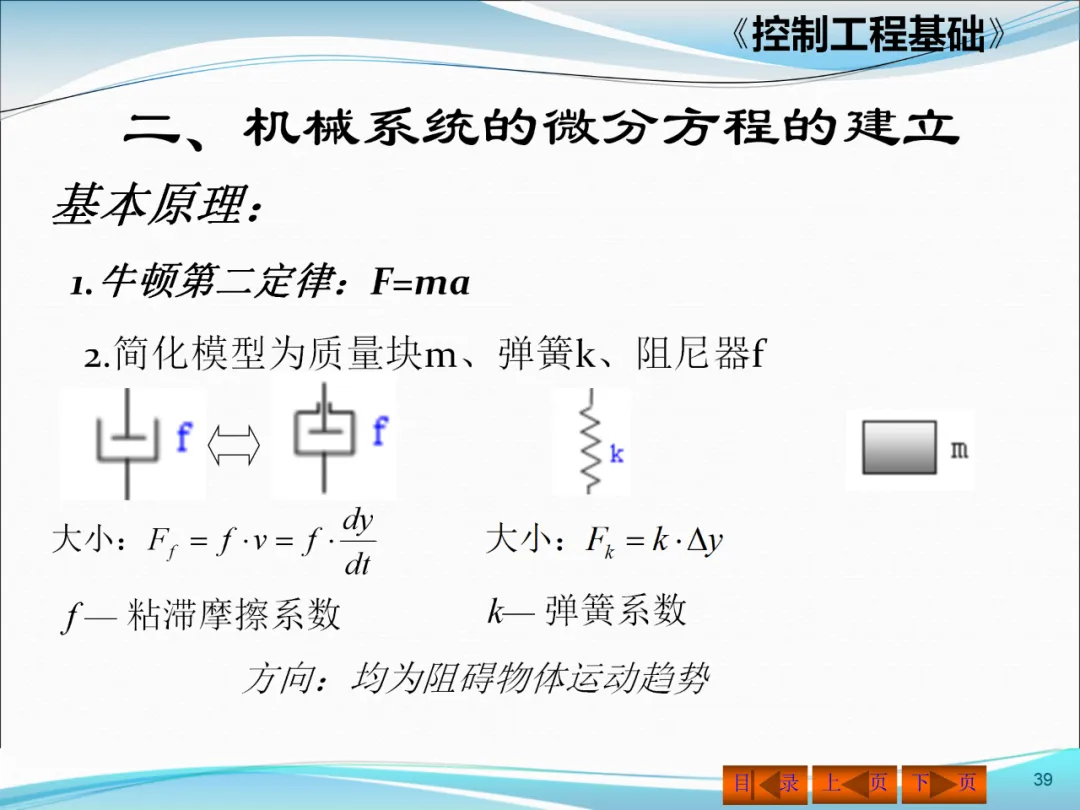
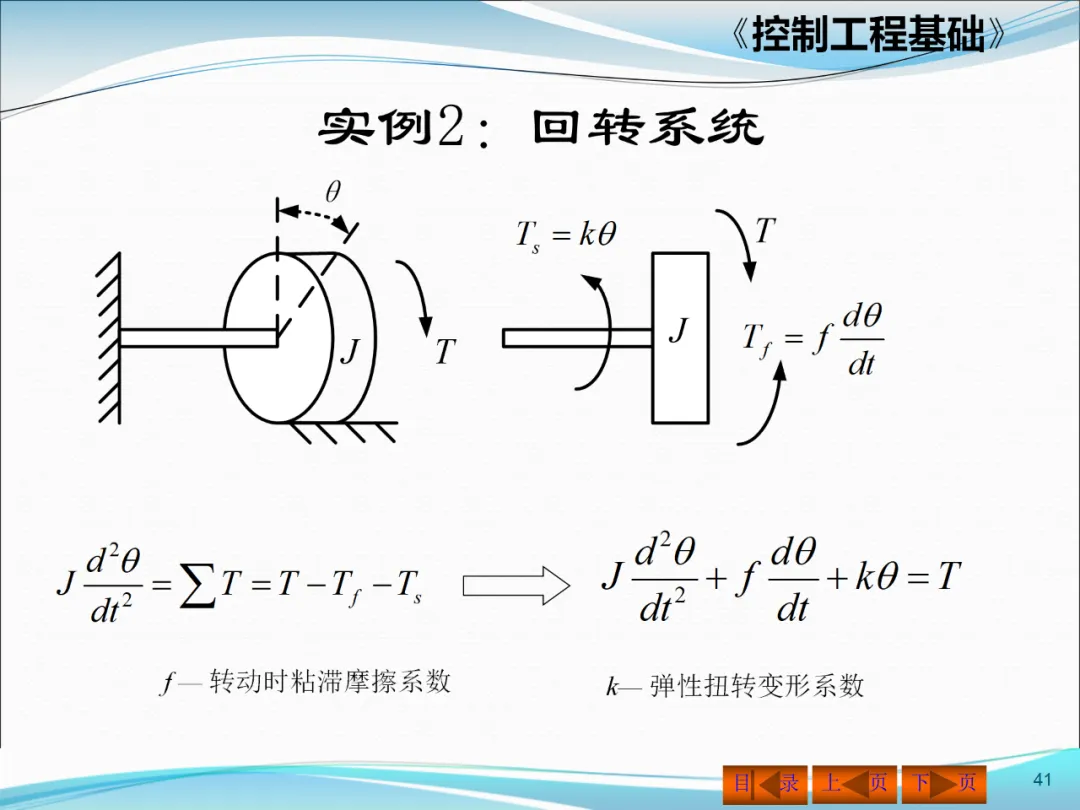
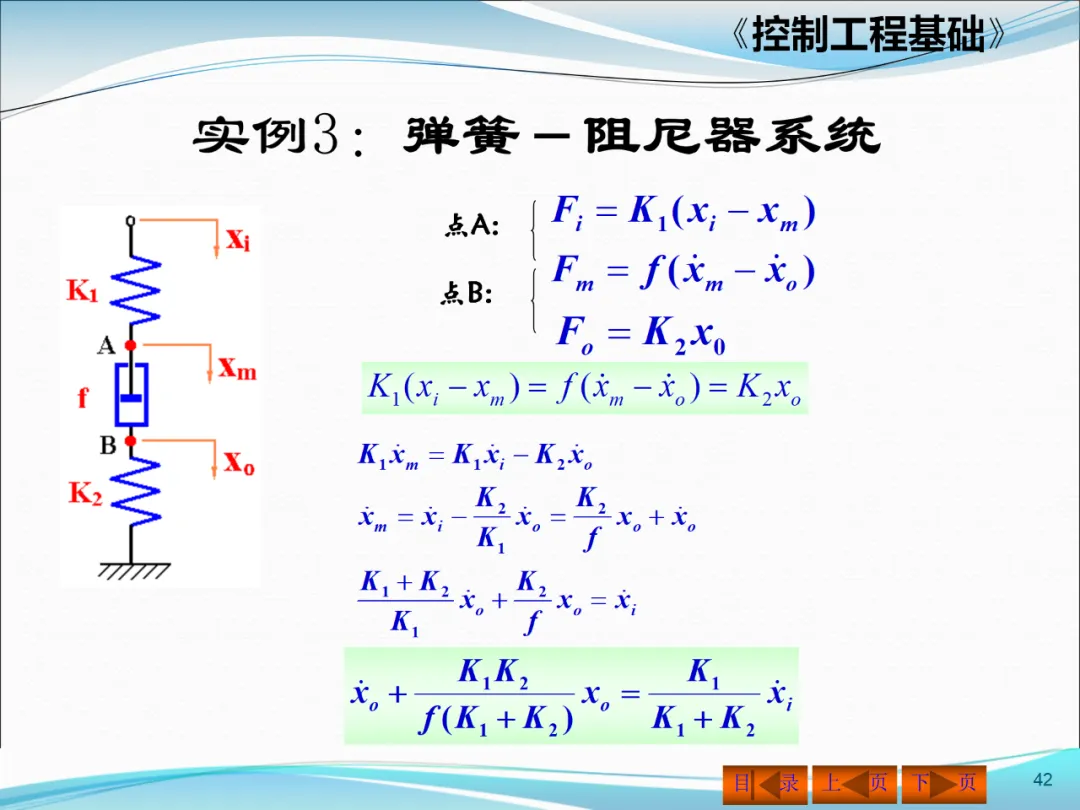
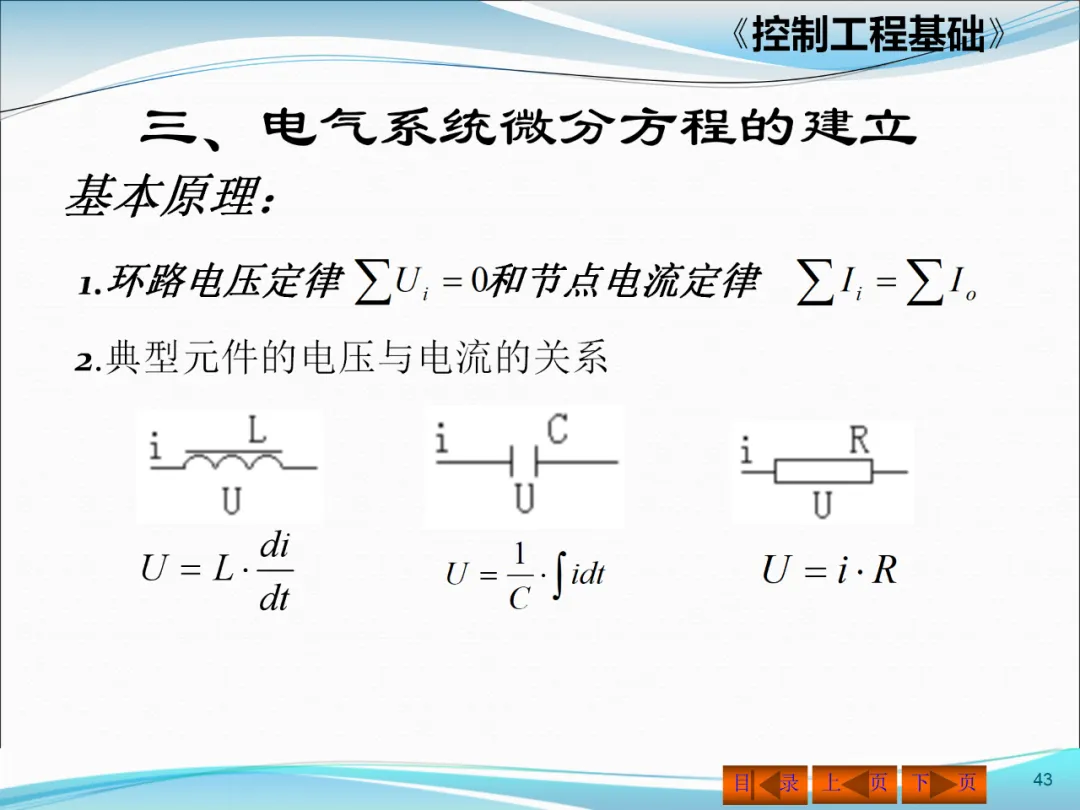
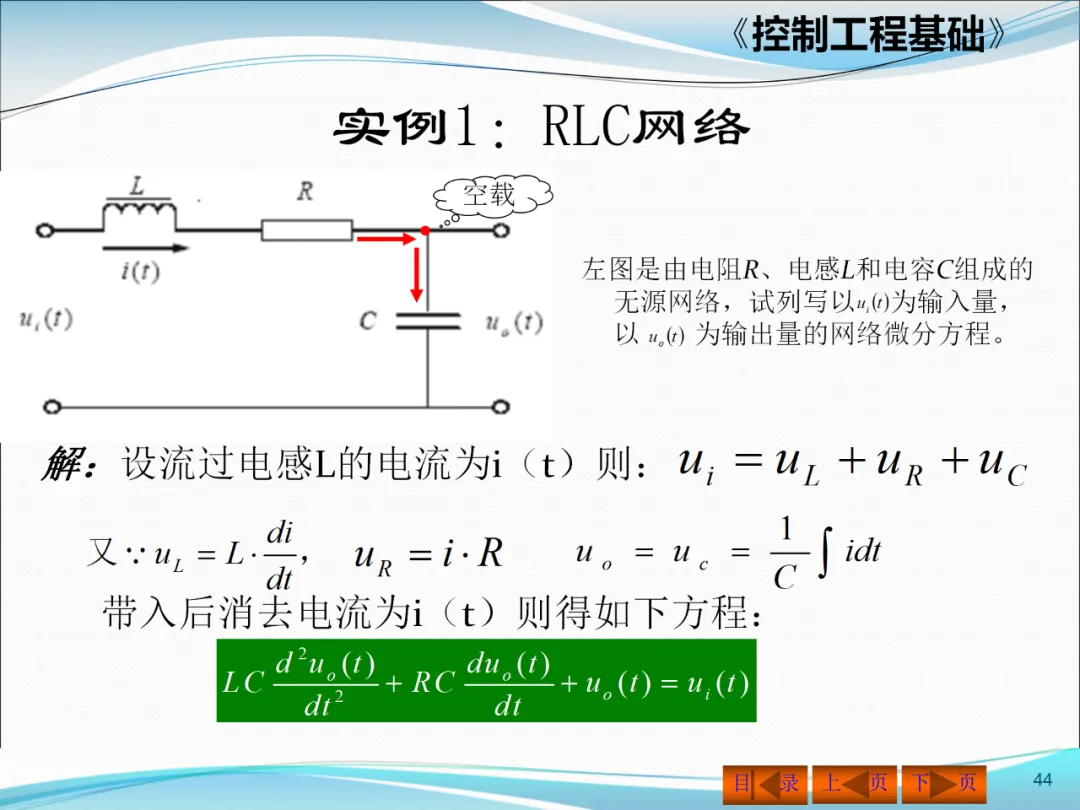
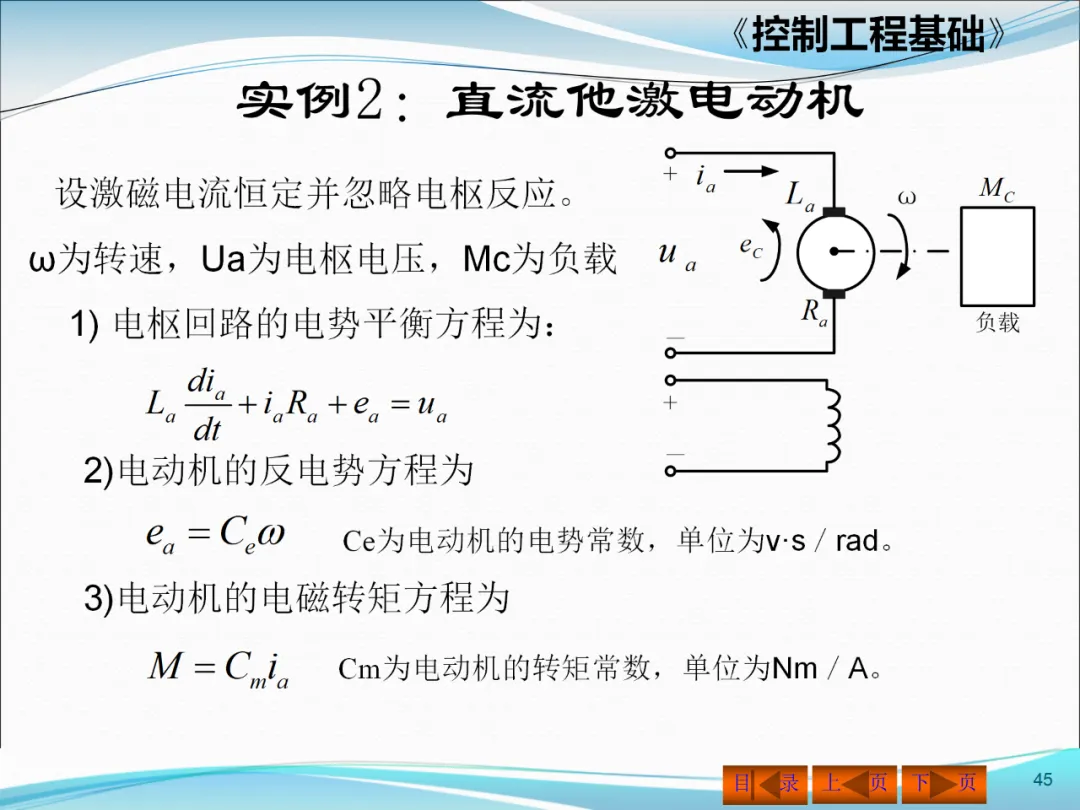
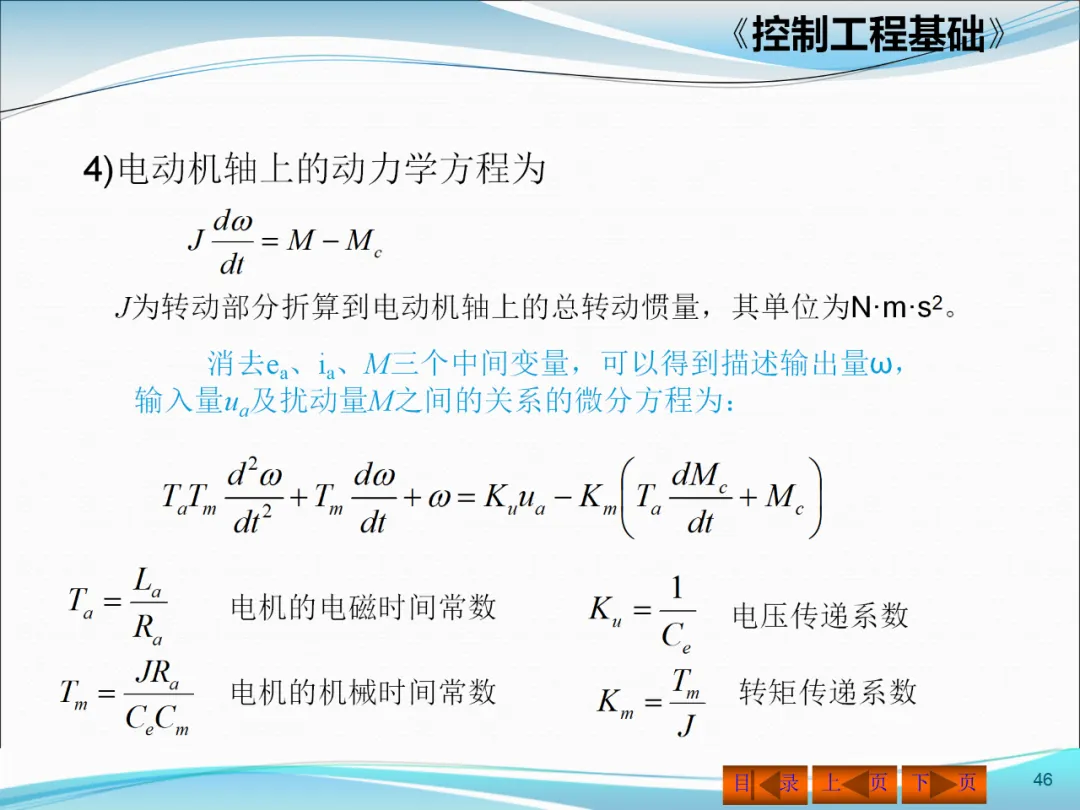
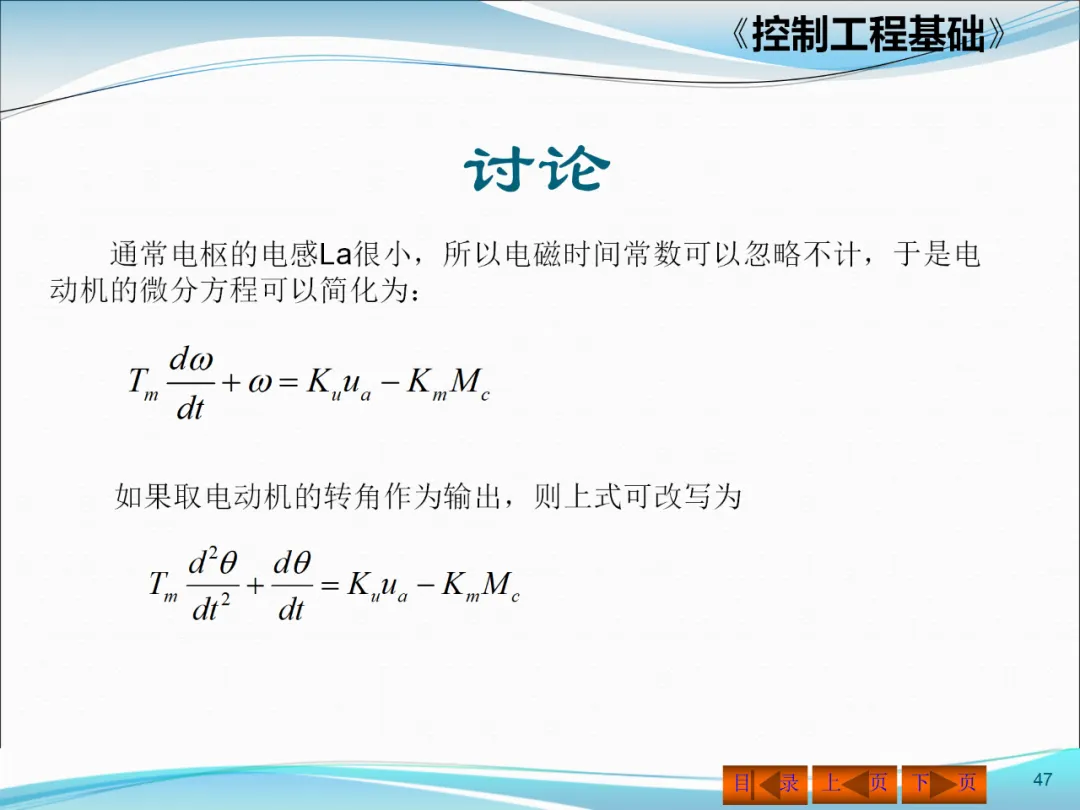
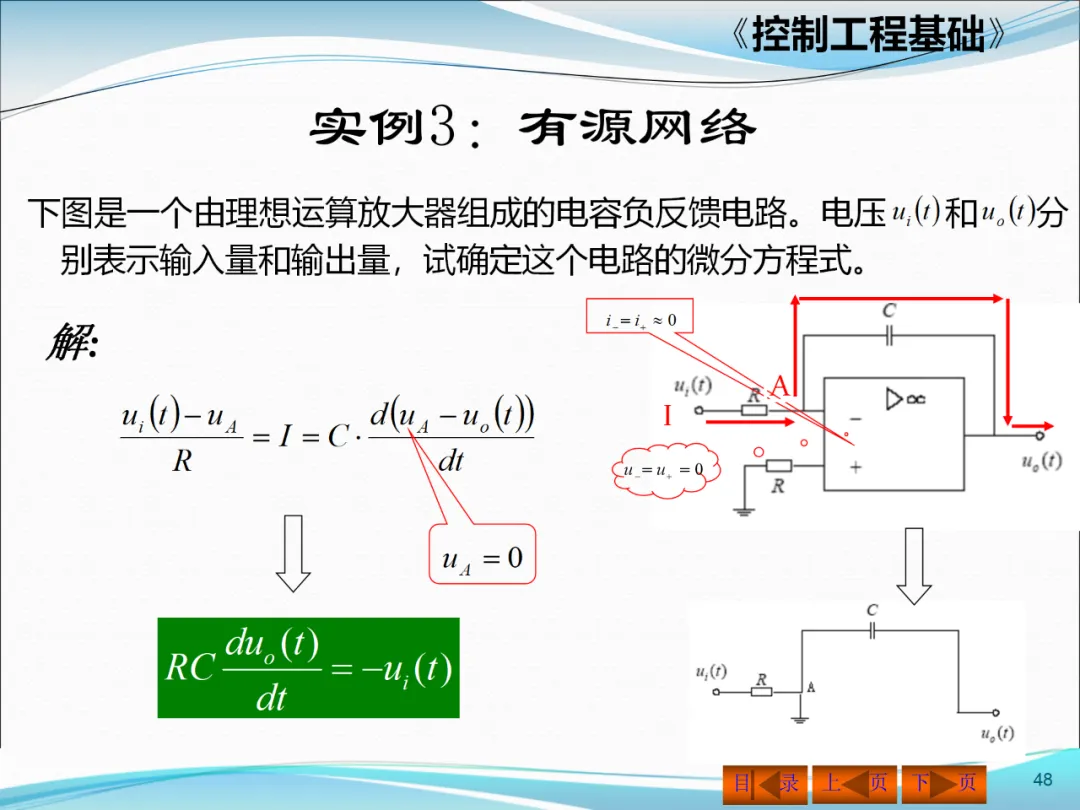
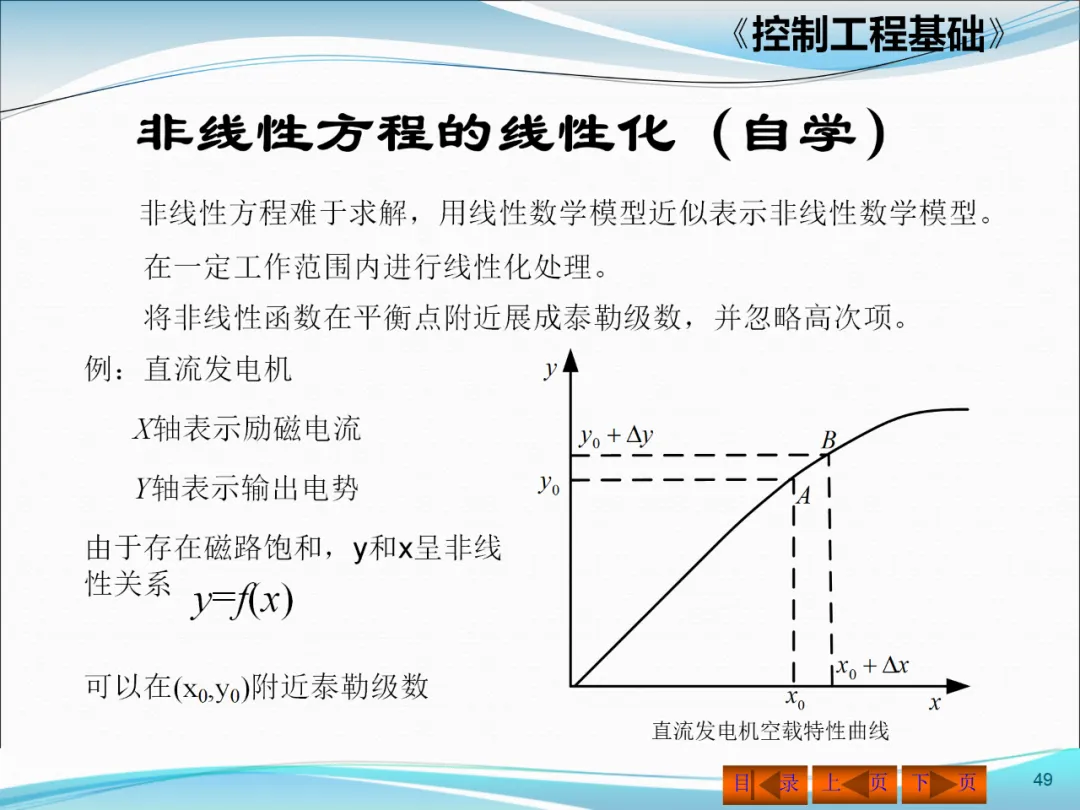
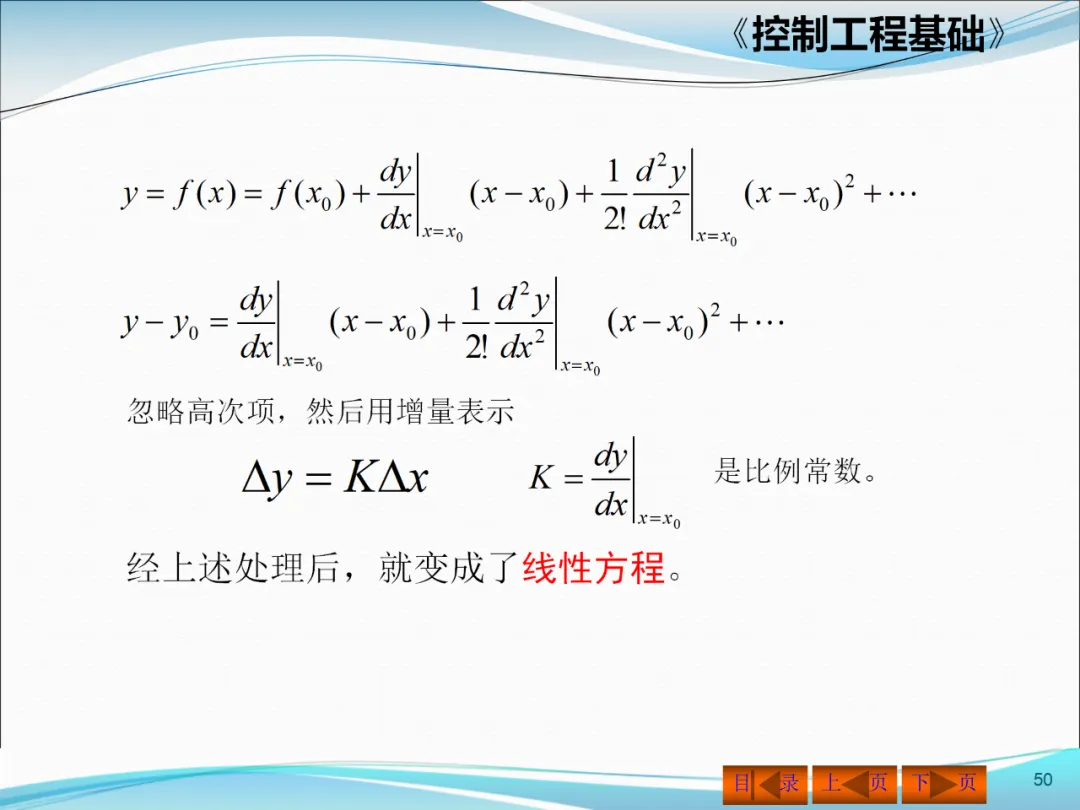
二、系统的数学模型
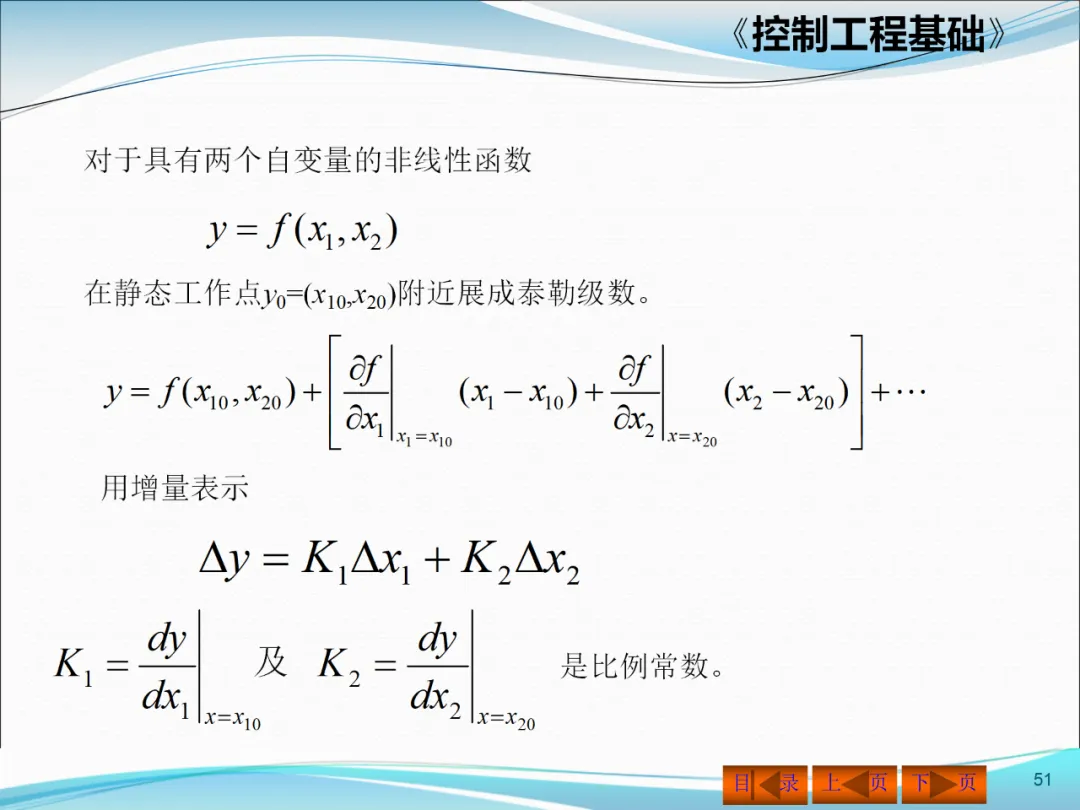
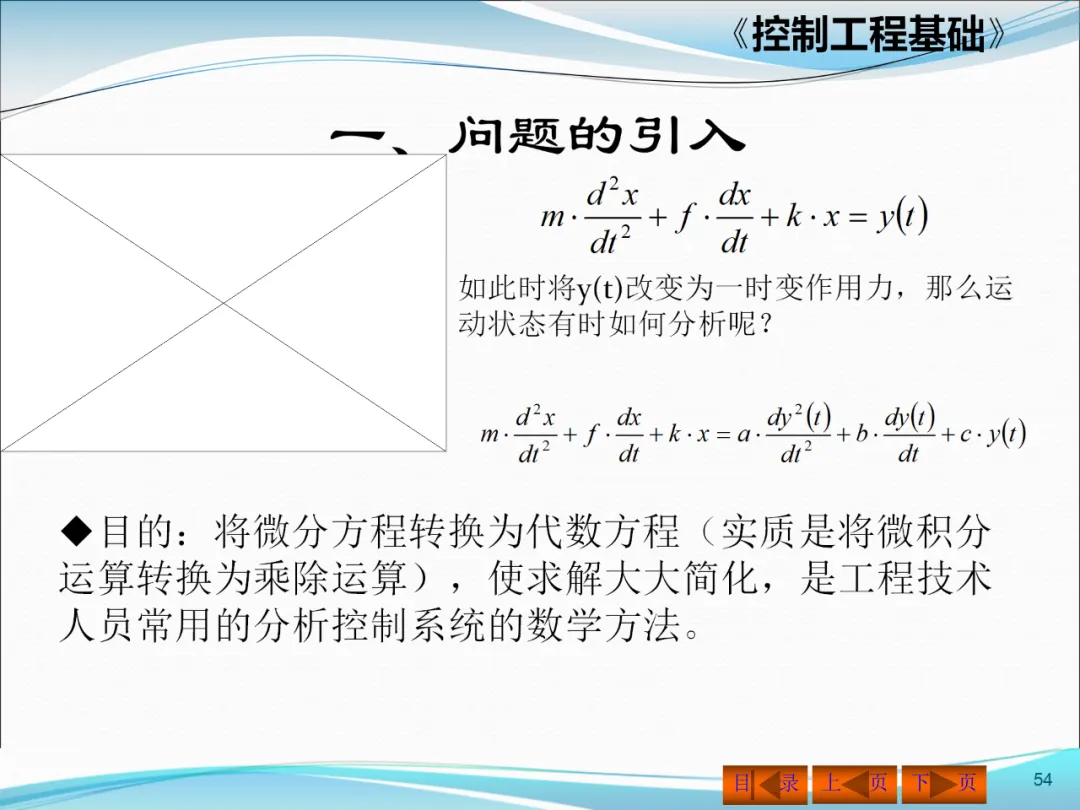
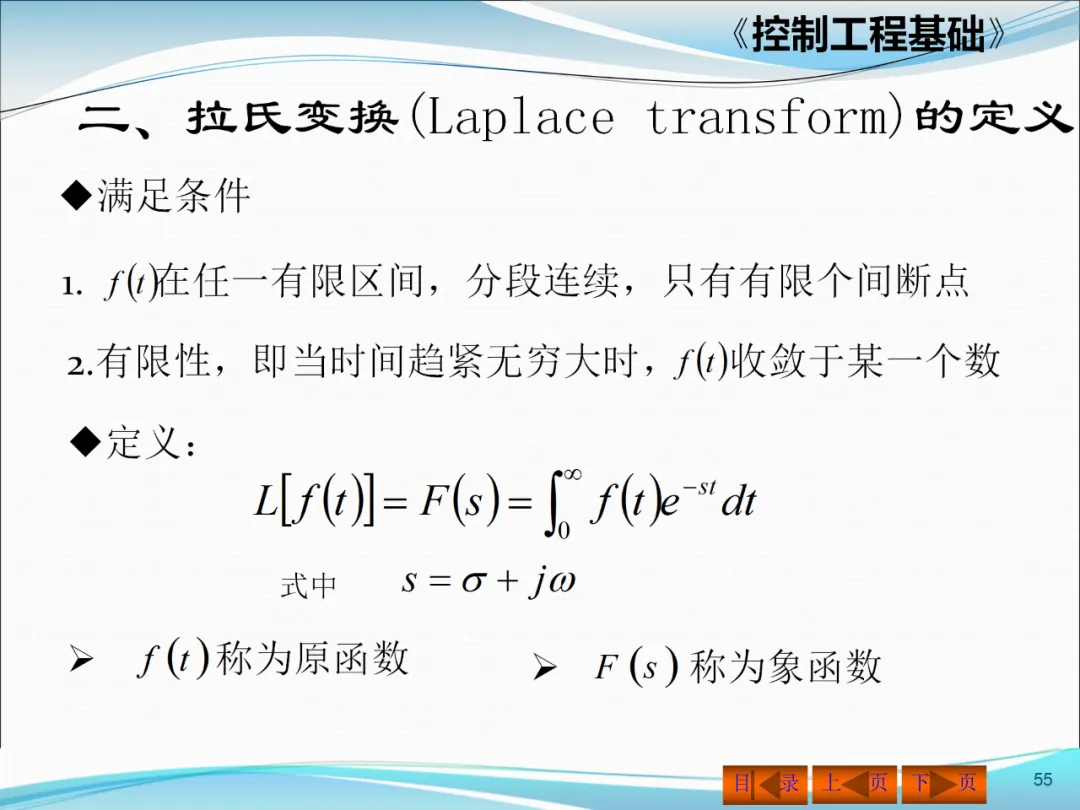
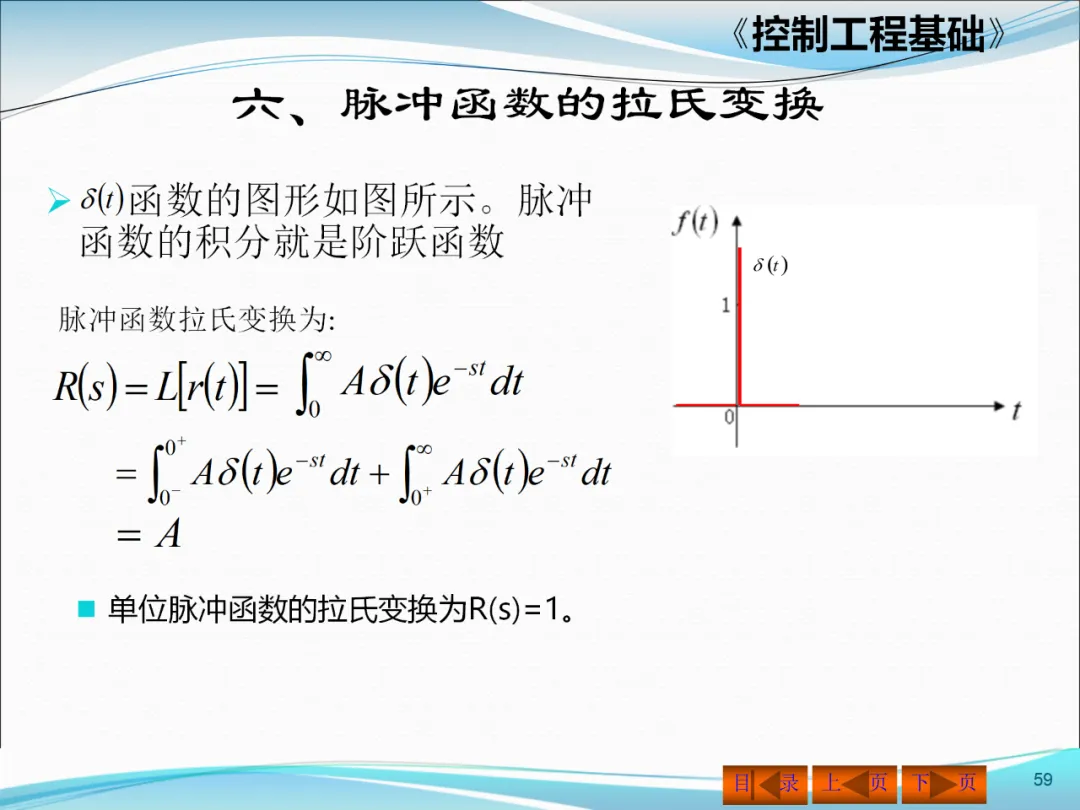
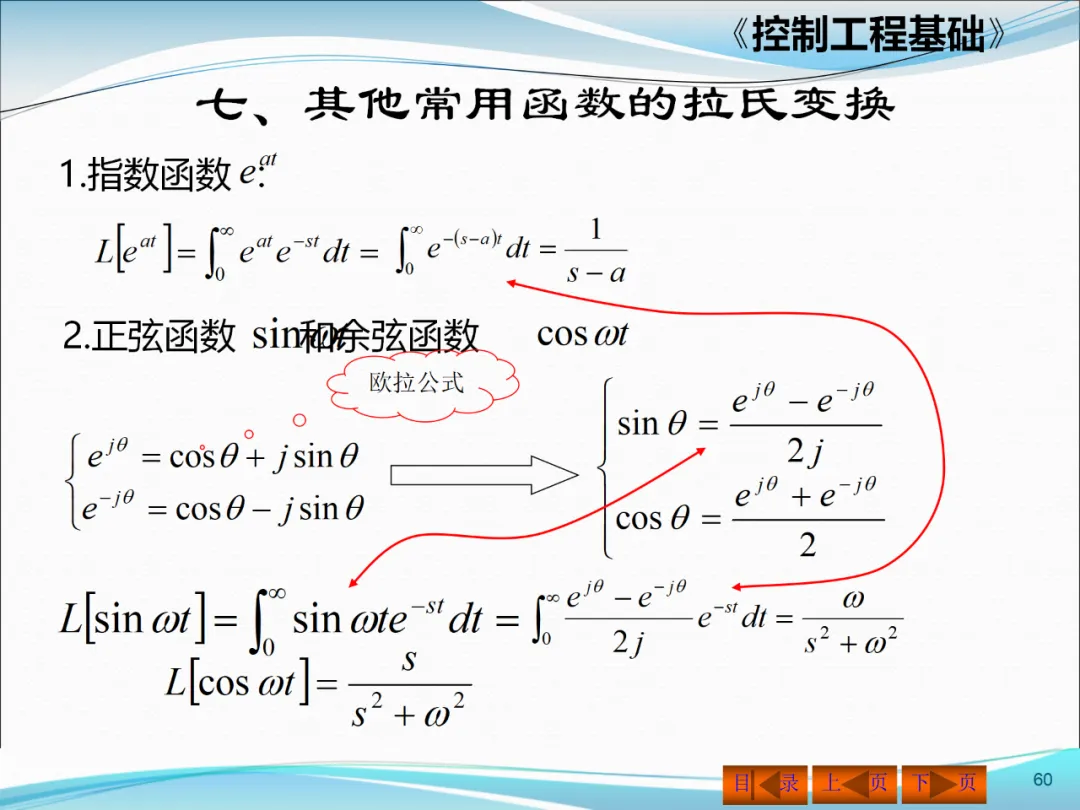
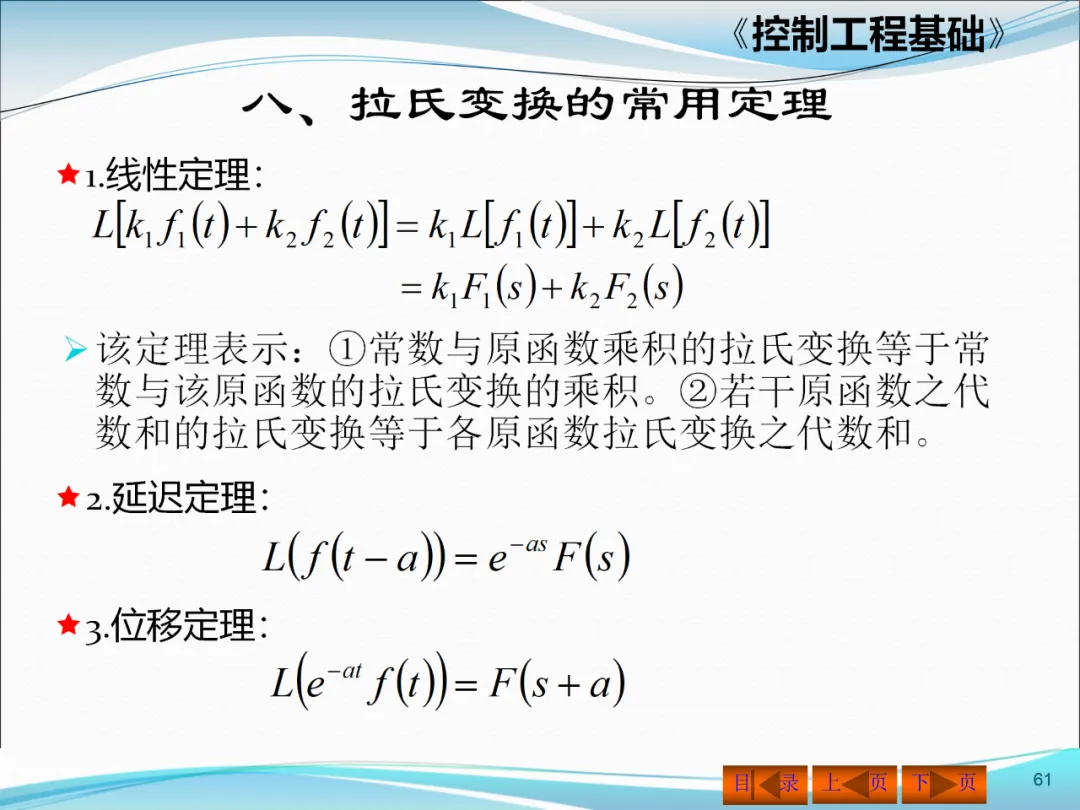
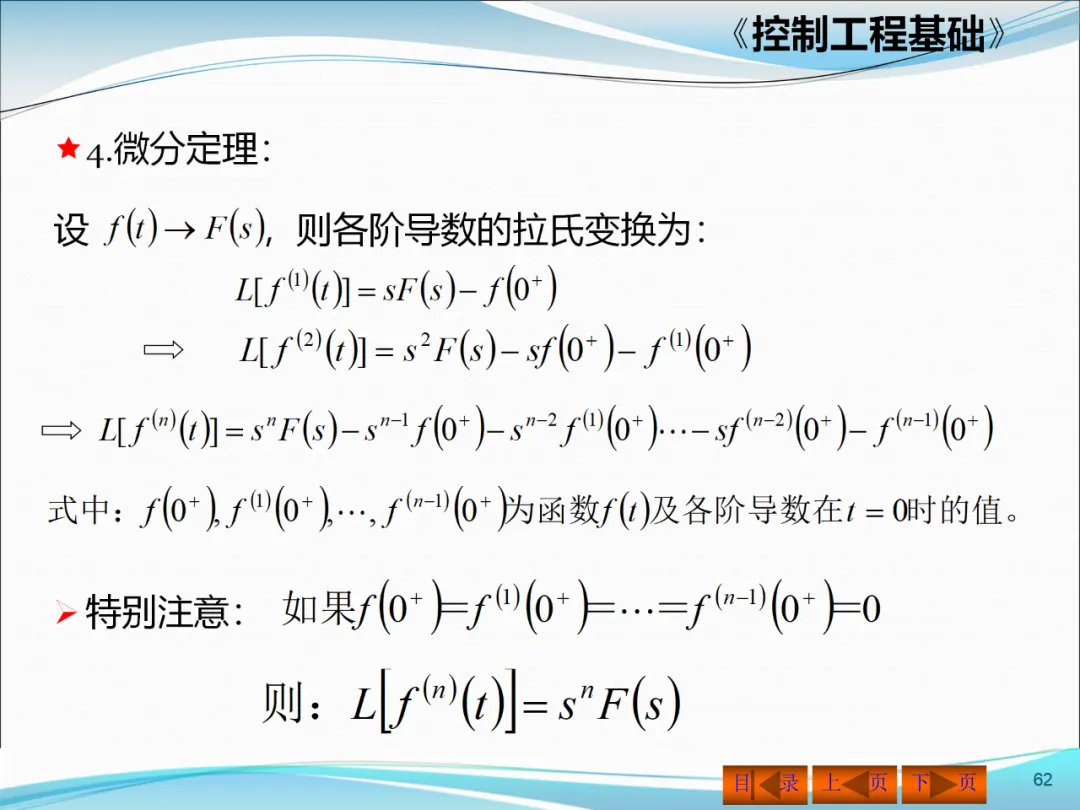
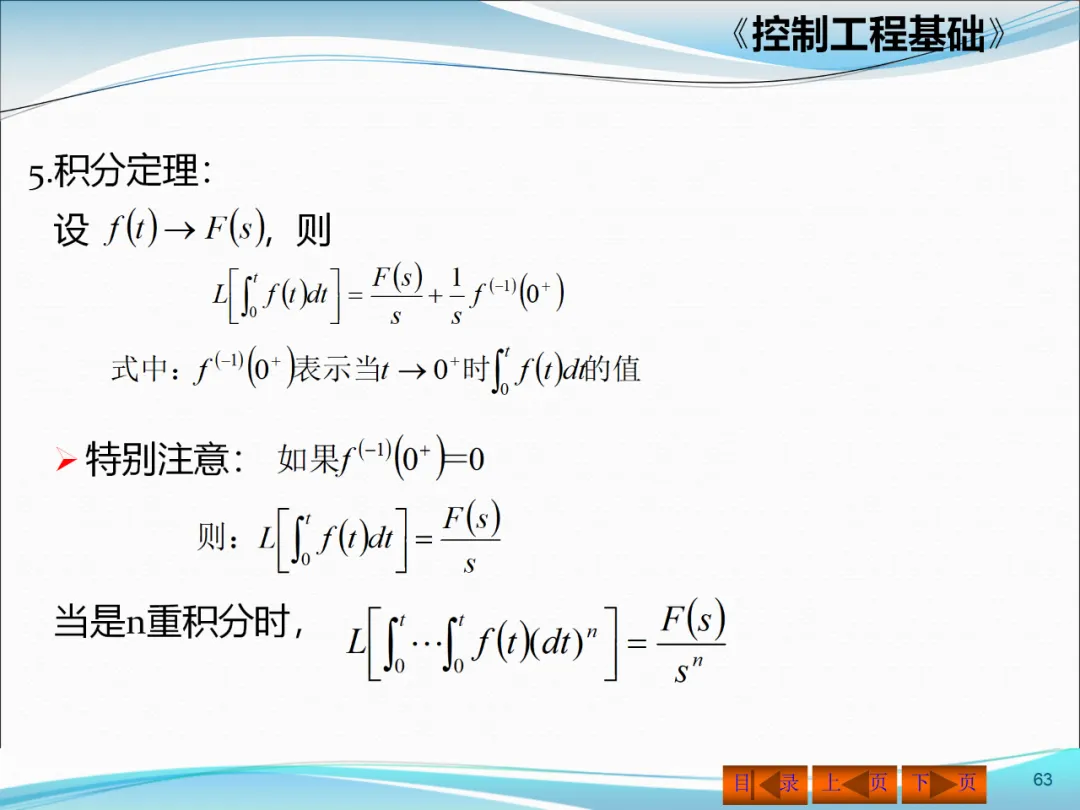
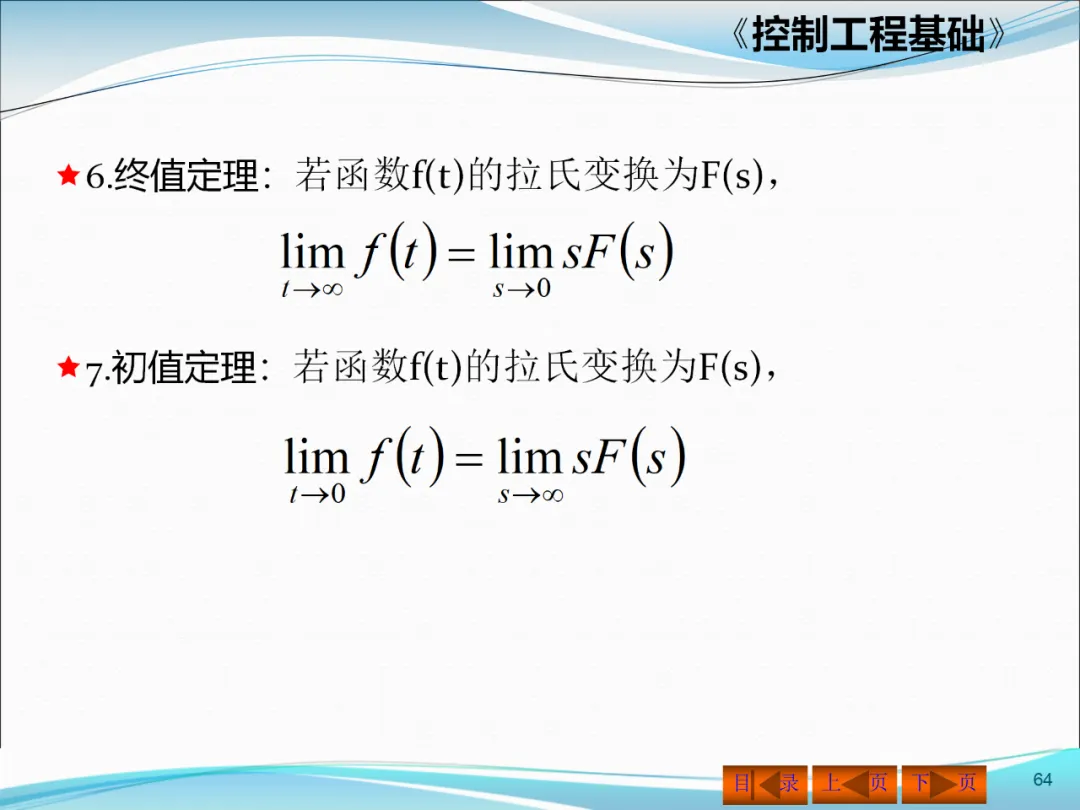
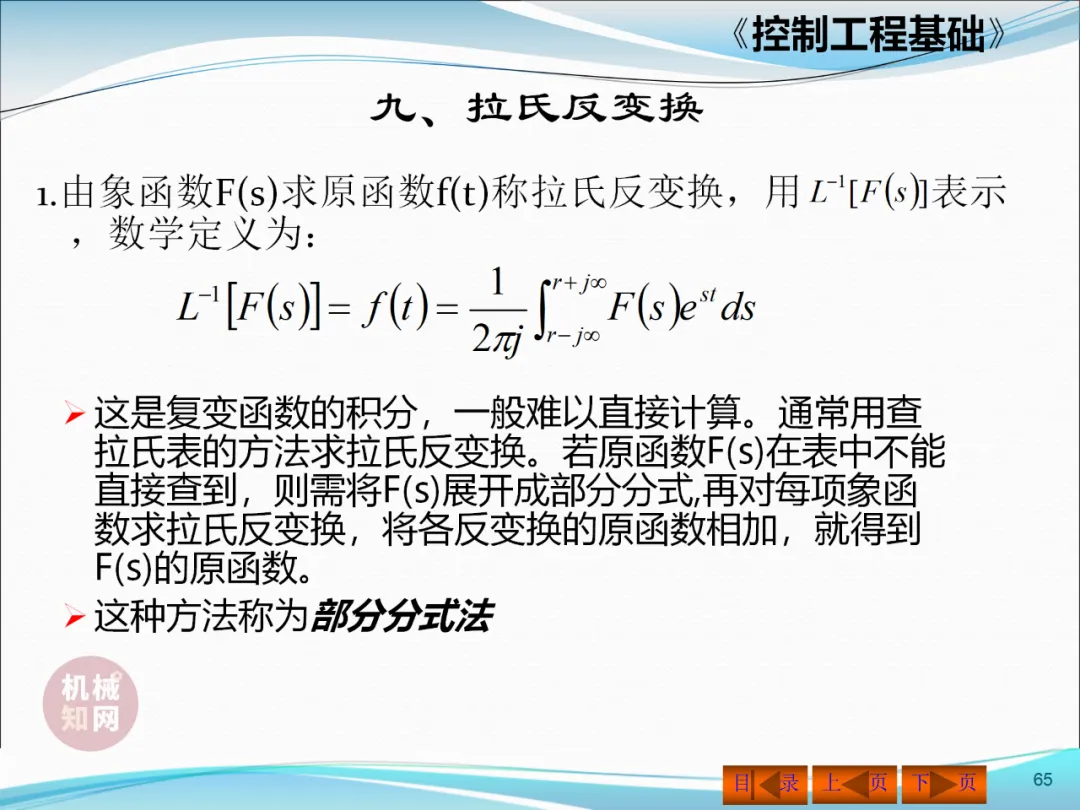
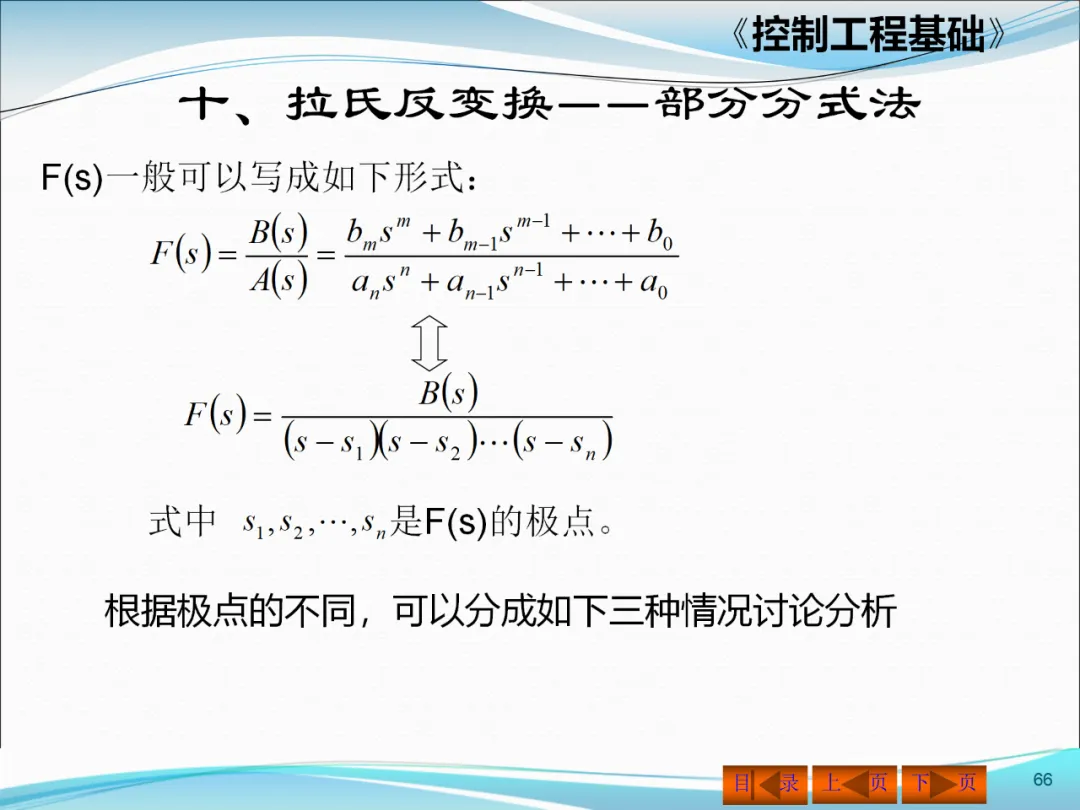
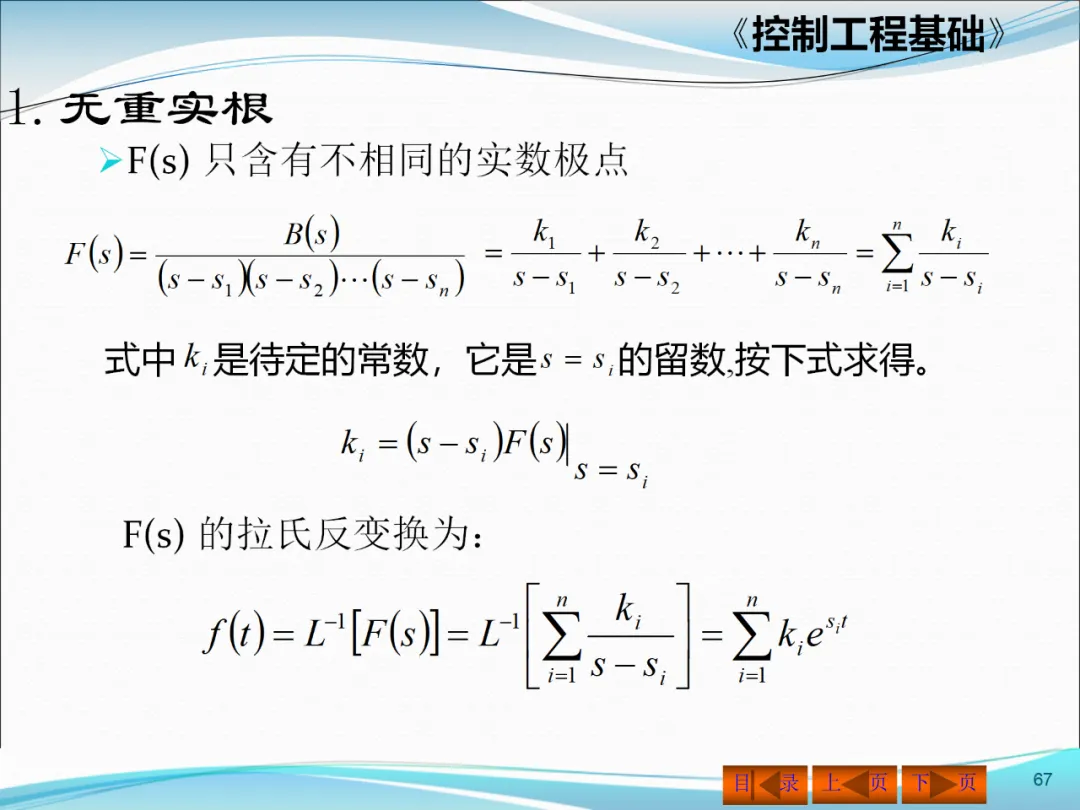
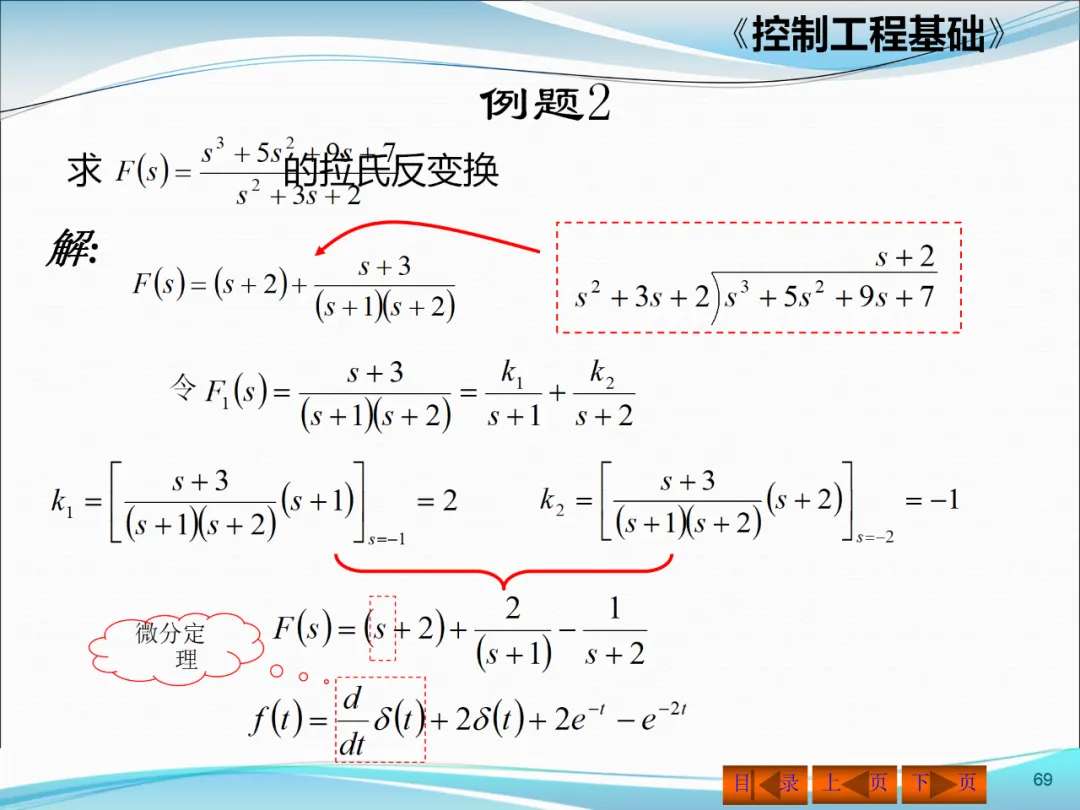
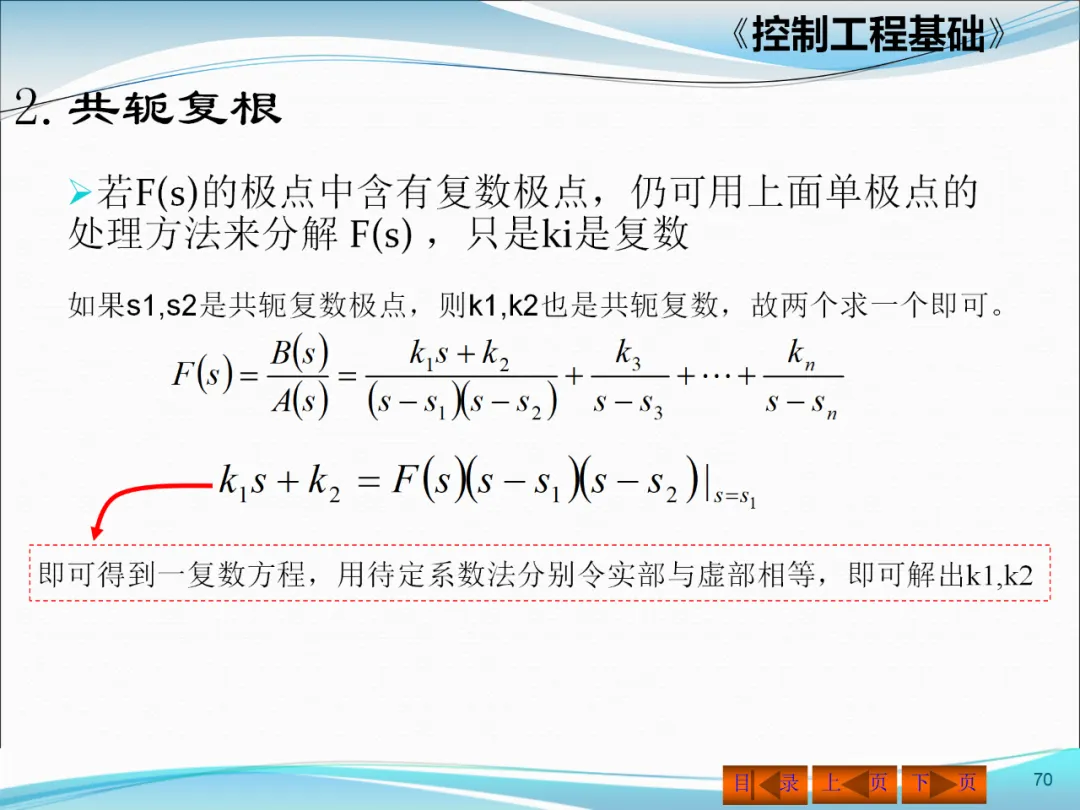
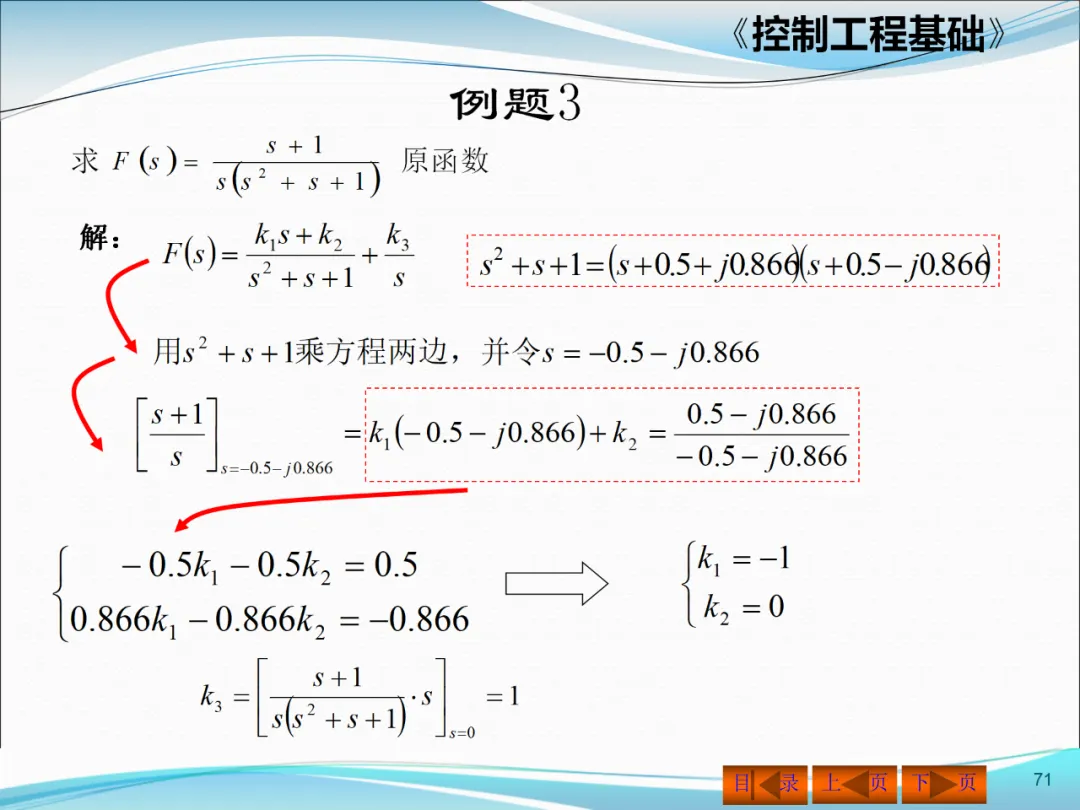
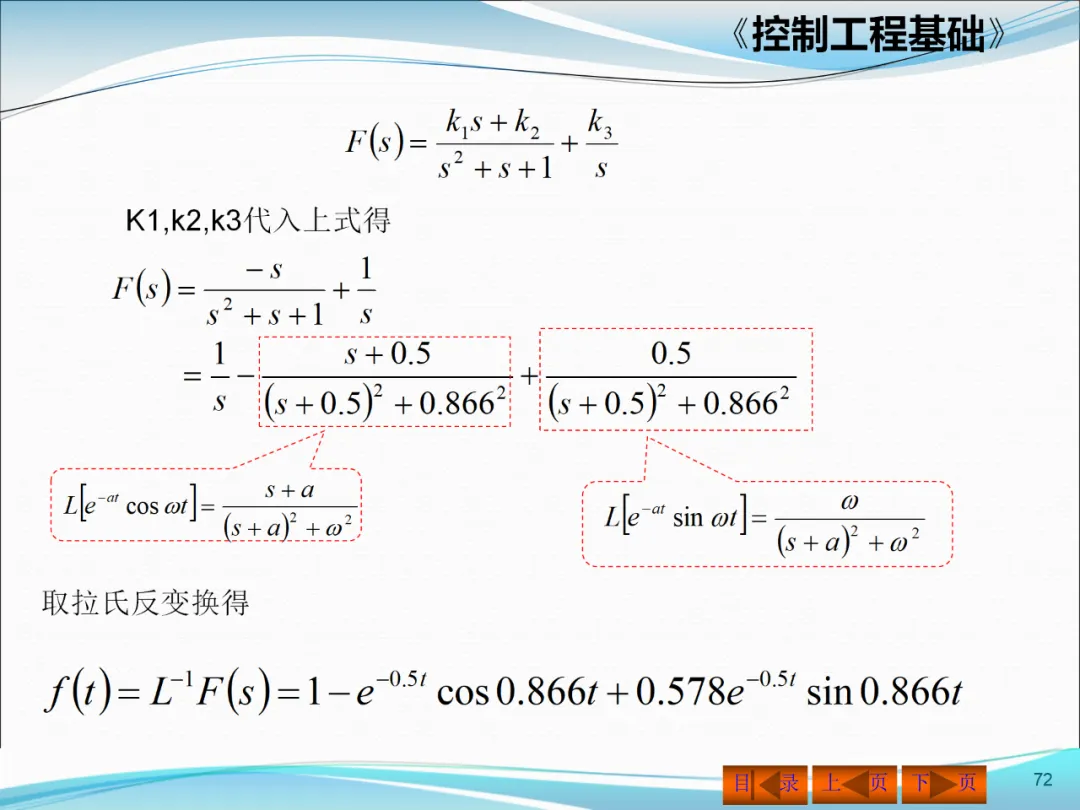
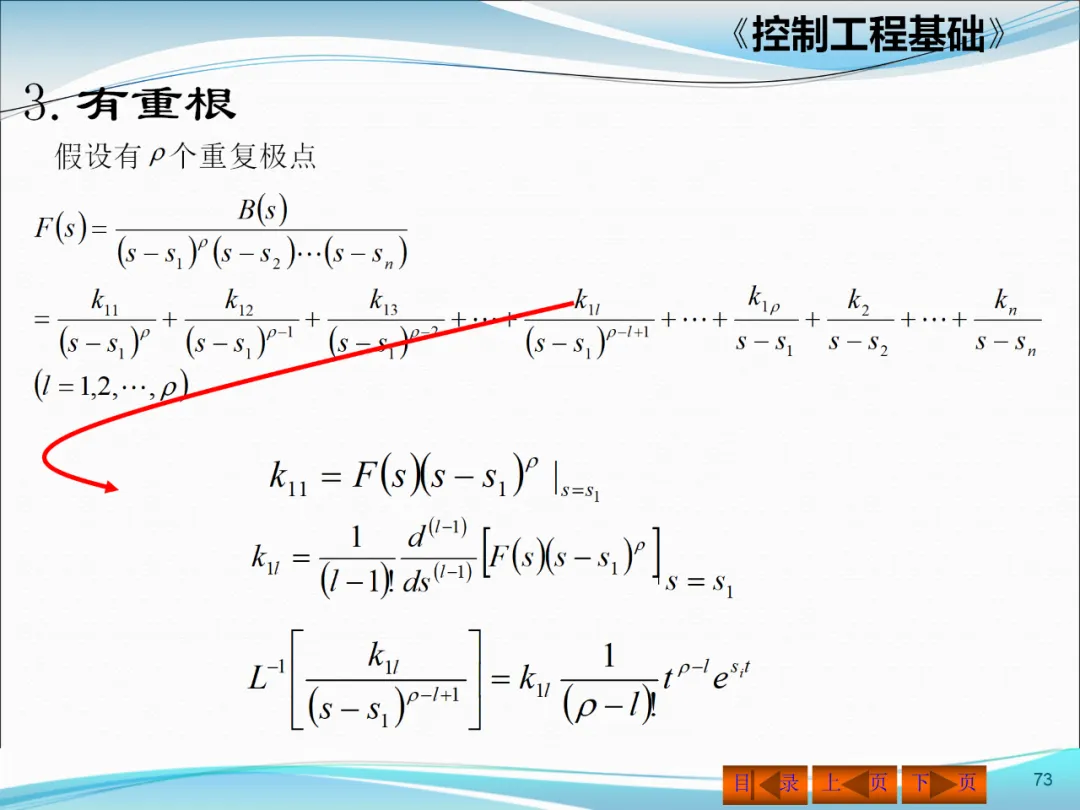
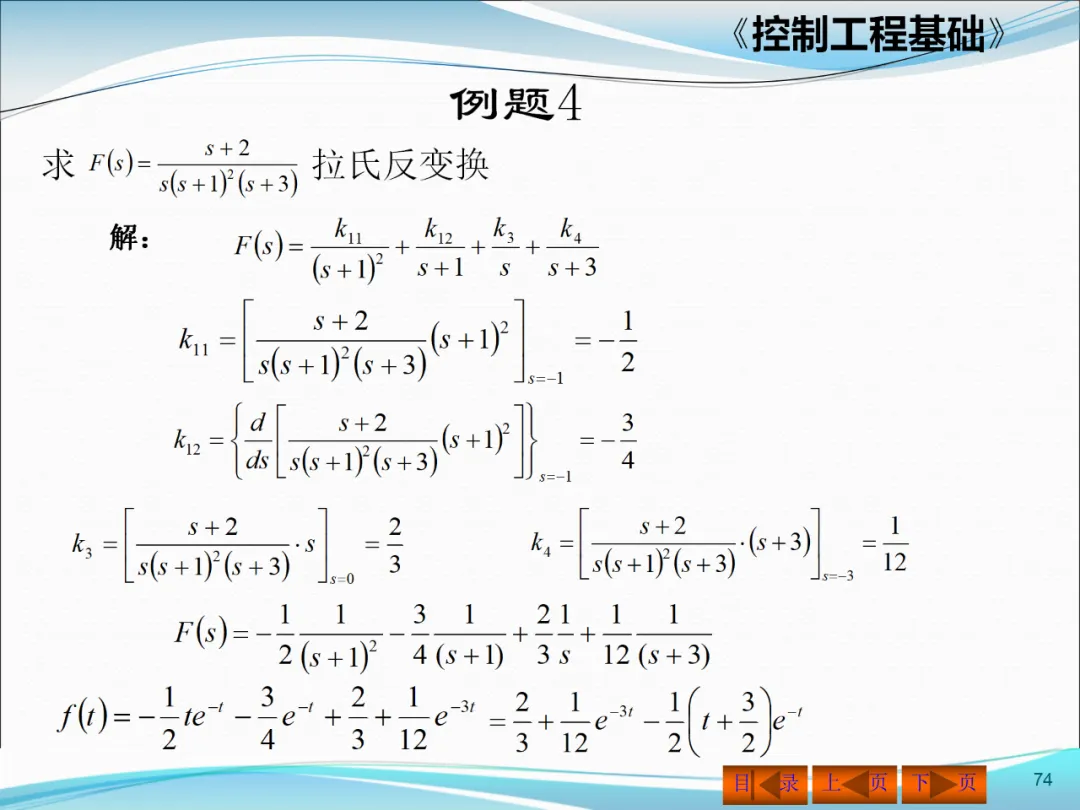
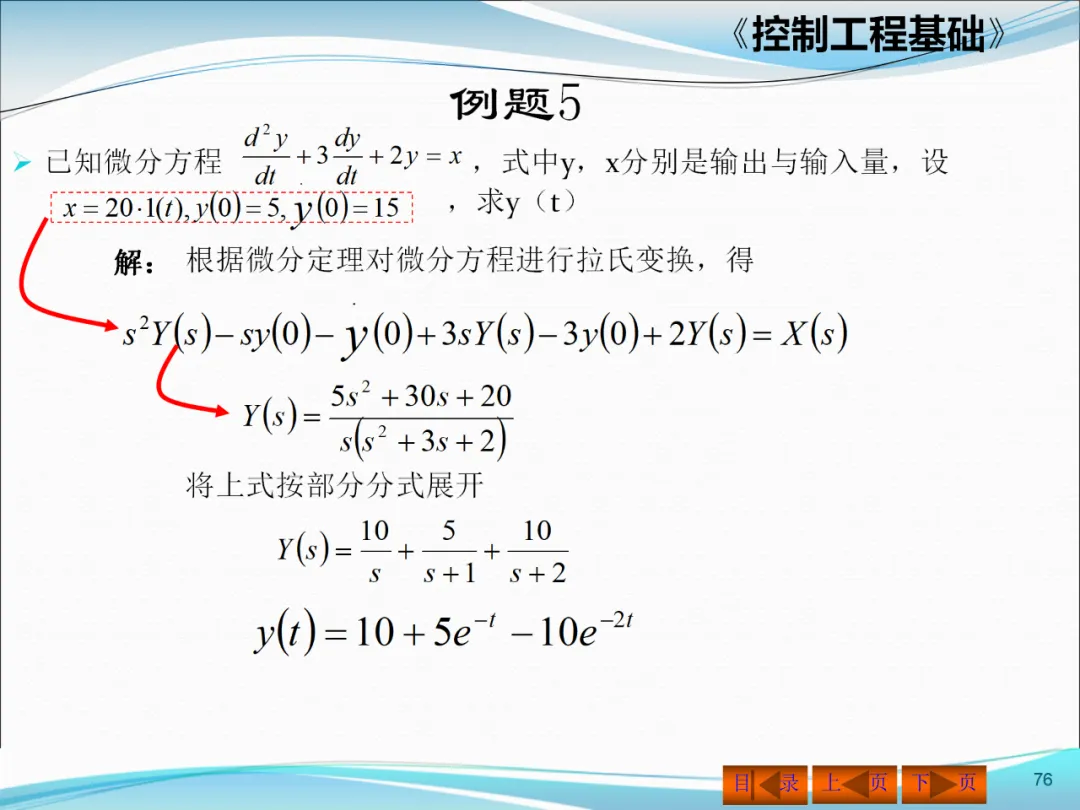
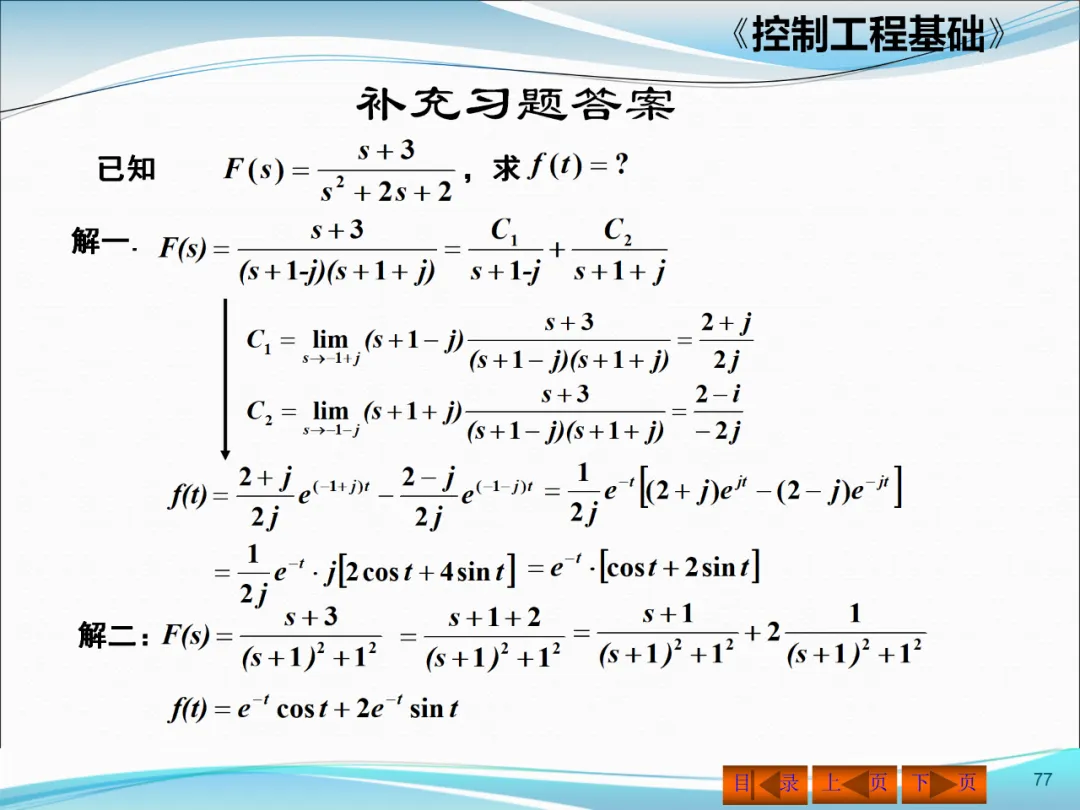
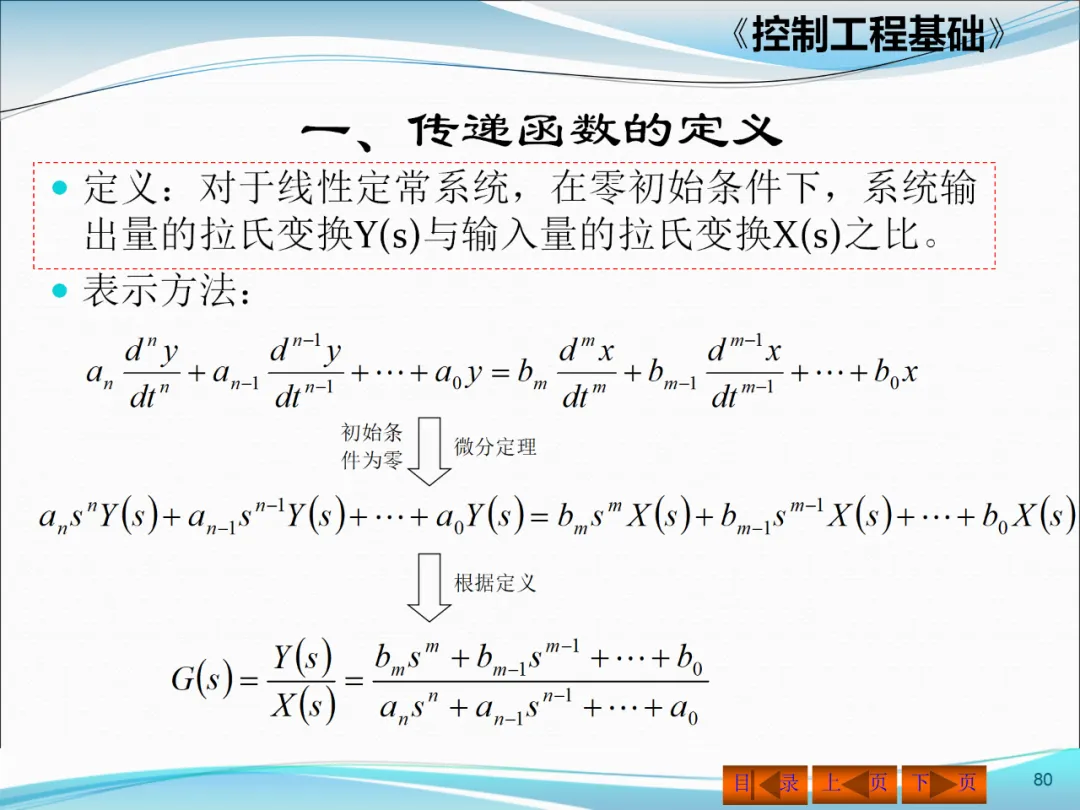
描述系统动态特性的数学表达式称为数学模型,主要包括微分方程、传递函数和频率特性。传递函数是线性定常系统在零初始条件下,输出拉氏变换与输入拉氏变换之比,它只与系统结构和参数有关。系统常可分解为典型环节,如比例、惯性、积分、微分、振荡和延时环节等。
三、时域分析与性能指标
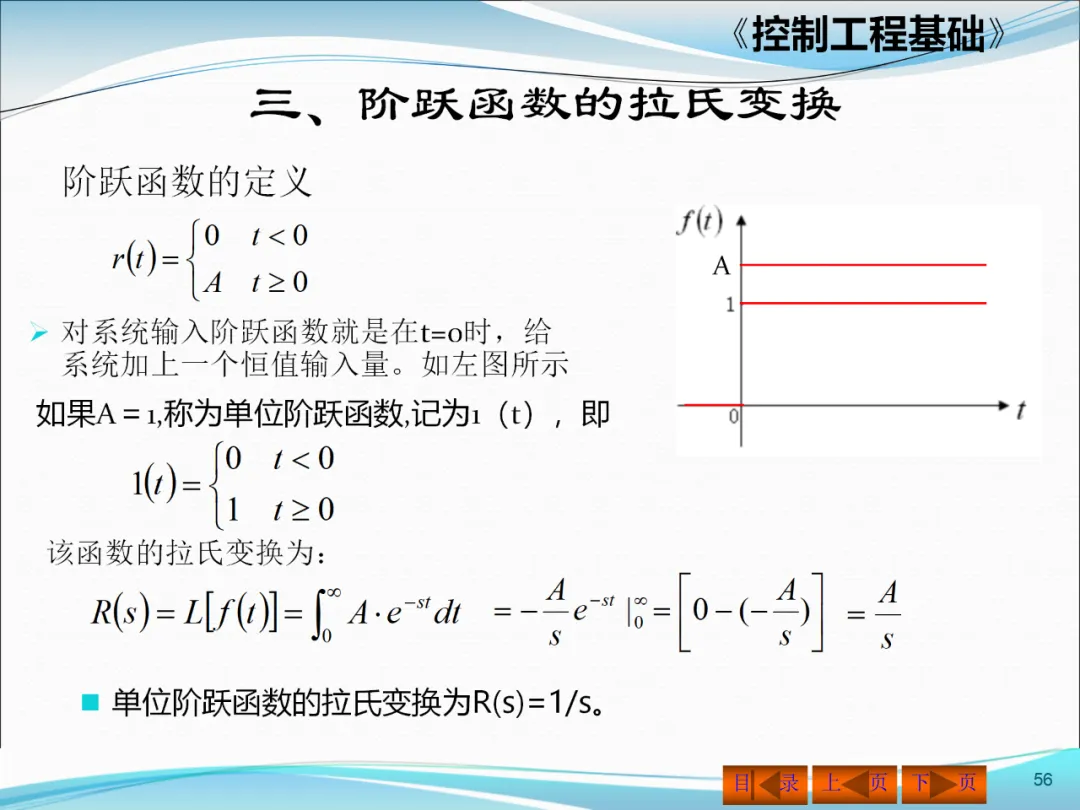
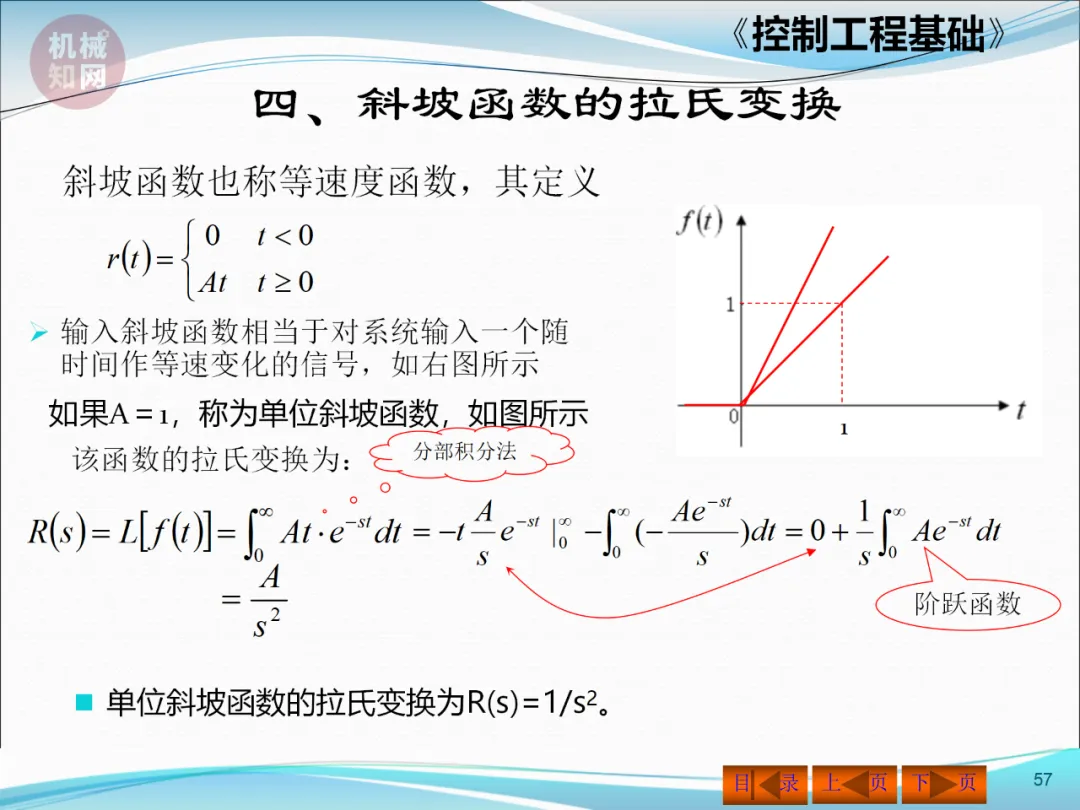
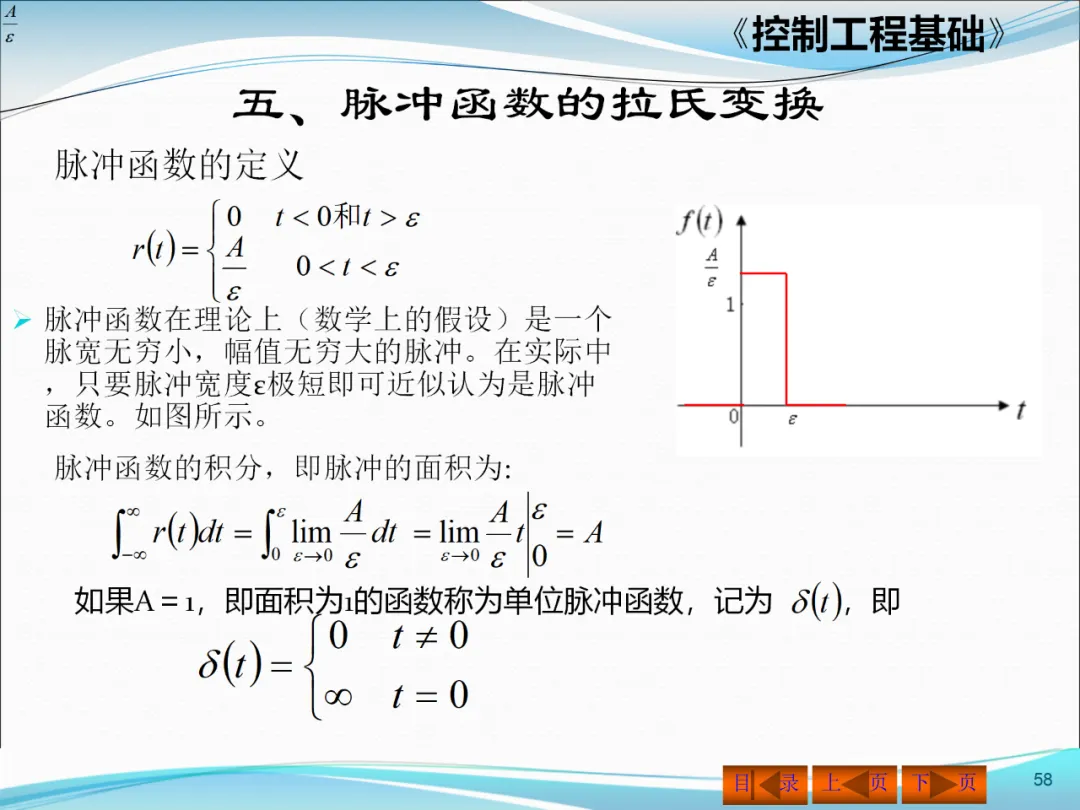
时间响应是系统输出随时间的变化过程,可分为瞬态响应和稳态响应。评价系统动态性能的时域指标基于单位阶跃响应,主要包括:上升时间、峰值时间、最大超调量(反映平稳性)和调整时间(反映快速性)。
对于二阶系统,这些指标与阻尼比ζ和无阻尼固有频率ω_n密切相关,当ζ=0.7时综合性能较佳。稳态误差则用于评价系统的准确性。
四、频域分析与频率特性
频率特性是系统对正弦输入的稳态响应特性,包括幅频特性和相频特性,可视为将传递函数中的s替换为jω得到。其图形表示主要有极坐标图(Nyquist图)和对数坐标图(Bode图)。
通过绘制开环系统的Bode图,可以分析系统的稳定性和动态性能,其中截止频率、相位裕度和幅值裕度是关键频域指标。
五、系统稳定性分析
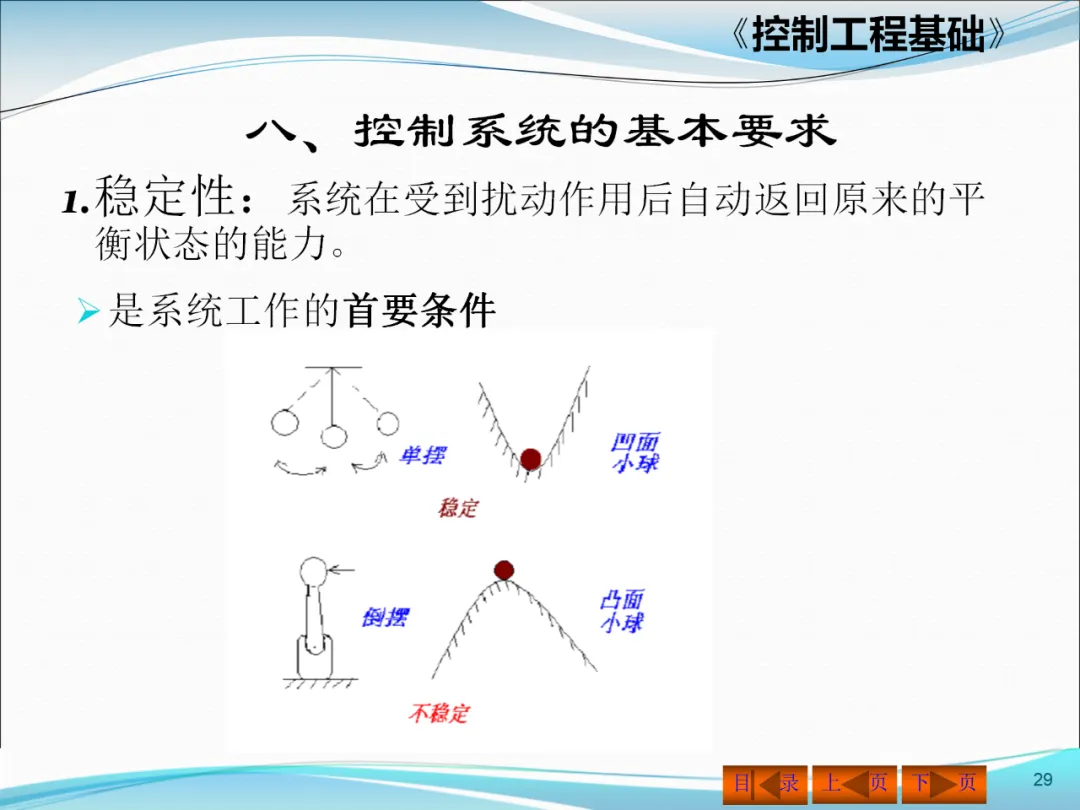
稳定性是系统能够恢复平衡状态的能力,是系统正常工作的首要条件。线性系统稳定的充要条件是其特征方程的所有根(即闭环极点)均具有负实部,即均位于s平面的左半部分。
常用的稳定性判据有劳斯(Routh)判据(基于特征方程系数)和奈奎斯特(Nyquist)判据(基于开环频率特性图)。相位裕量和幅值裕量则用于定量表征系统的相对稳定性。
扫码或打开链接下载本文PPT:
https://pan.quark.cn/s/d92db27293cd
50万+机械工程师都在看↓↓↓
关注上方公众号,回复关键词,免费领取海量资料!!
1. 回复【动图】领取10000+个机械动图及视频包
2. 回复【CAD】领取800GAutoCAD全套视频教程
3. 回复【UG】领取800G的UGNX全套视频教程
4. 回复【SW】领取800G的Solidworks全套教程
5. 回复【机械设计】领取800G(非标)机械设计