燃料电池架构正式确立为2026年未来MALE(中空长航时)无人机全电二次供电系统的最优化解,完美平衡了“长航时储能极小化”与“短路负载能力极大化”的严格物理矛盾。
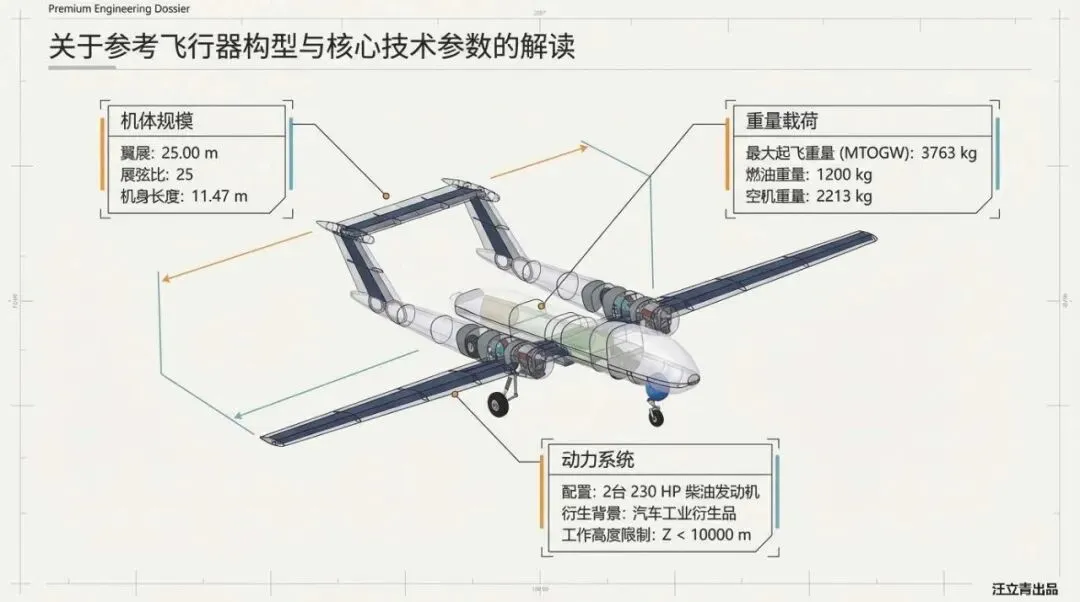
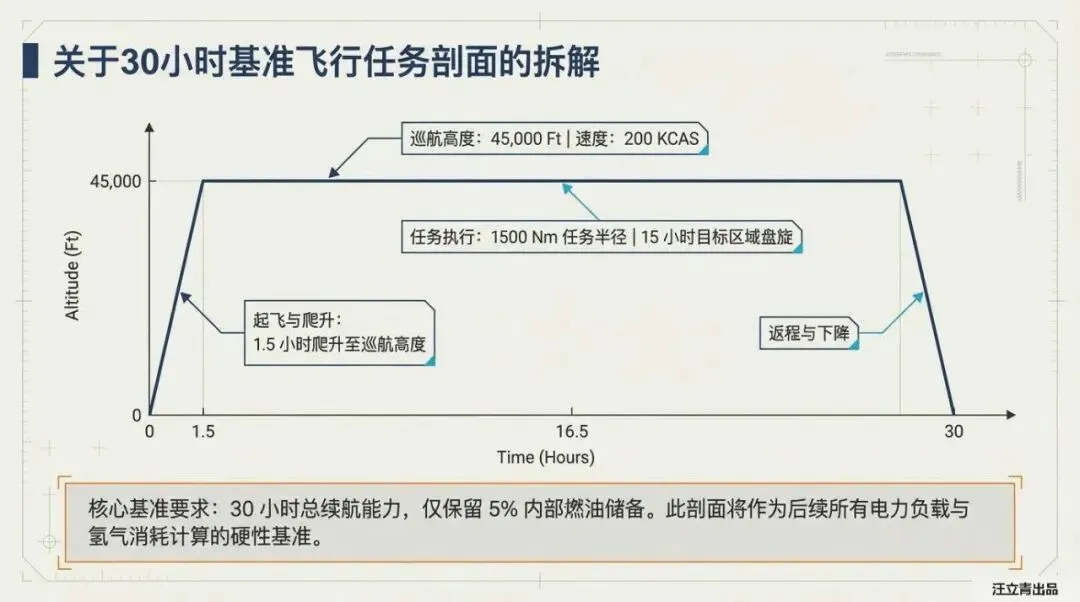
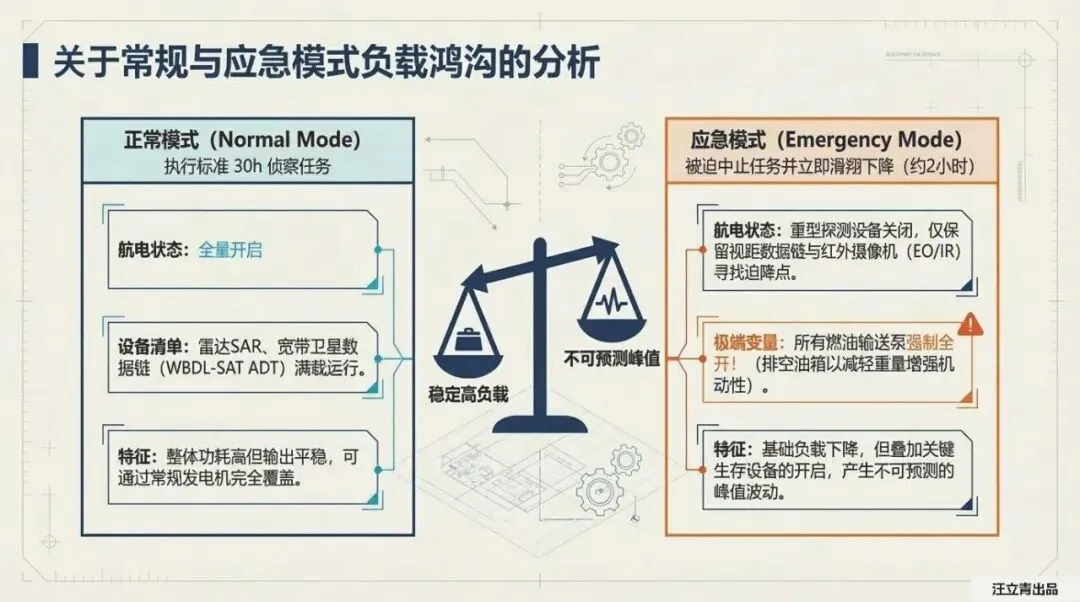
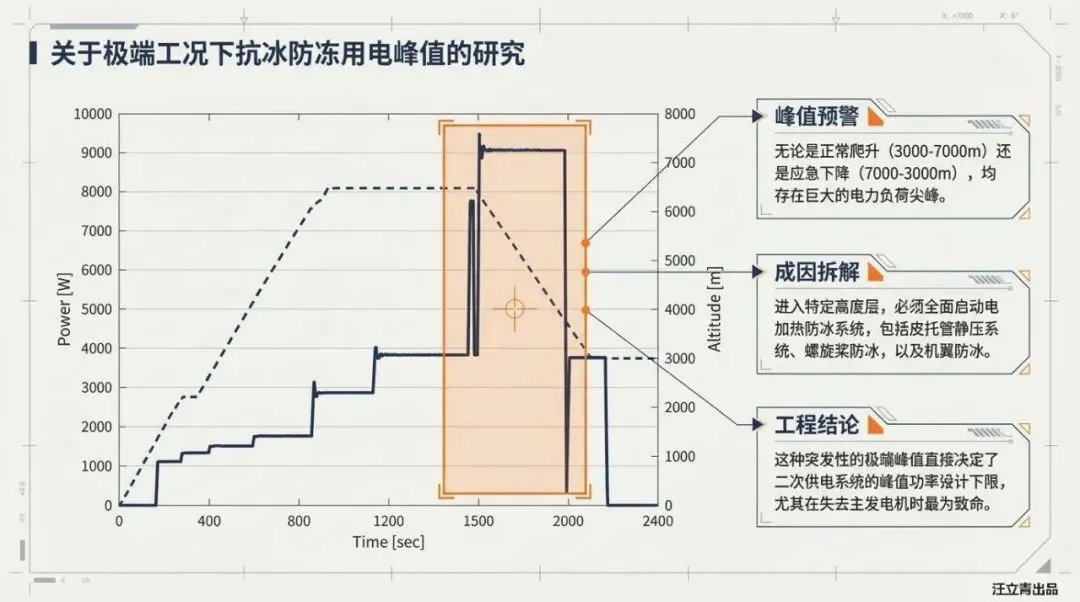
极端工况与负担尖峰针对最大升降机重量3763kg、翼展25m的飞行,其30小时基准飞行剖面(含45,000英尺高空巡航)穿出极端的用电鸿沟。在3000-7000m的爬升或上升云阶段,皮托管、螺旋桨与机翼的电加热防冰系统会瞬间拉升出巨大的电力尖峰。当遭遇被迫中止任务的应急模式(约2小时紧急滑翔下降)尽管重型雷达关闭,但燃油泵管道强制全开(排空油箱以增强机动性)与关键生保设备的运转将会产生预测的不可预测的高峰。
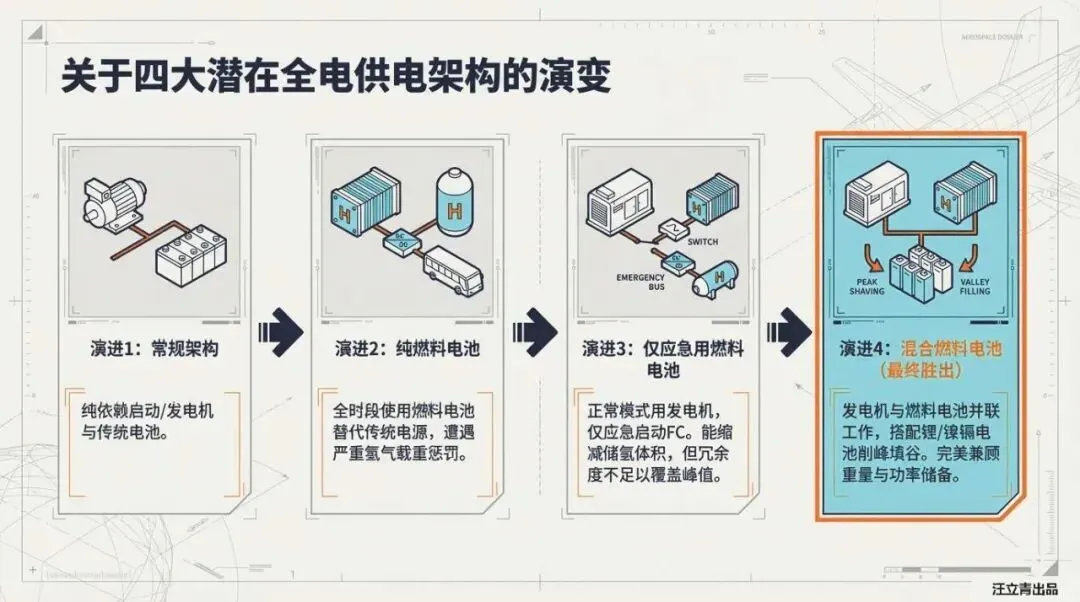
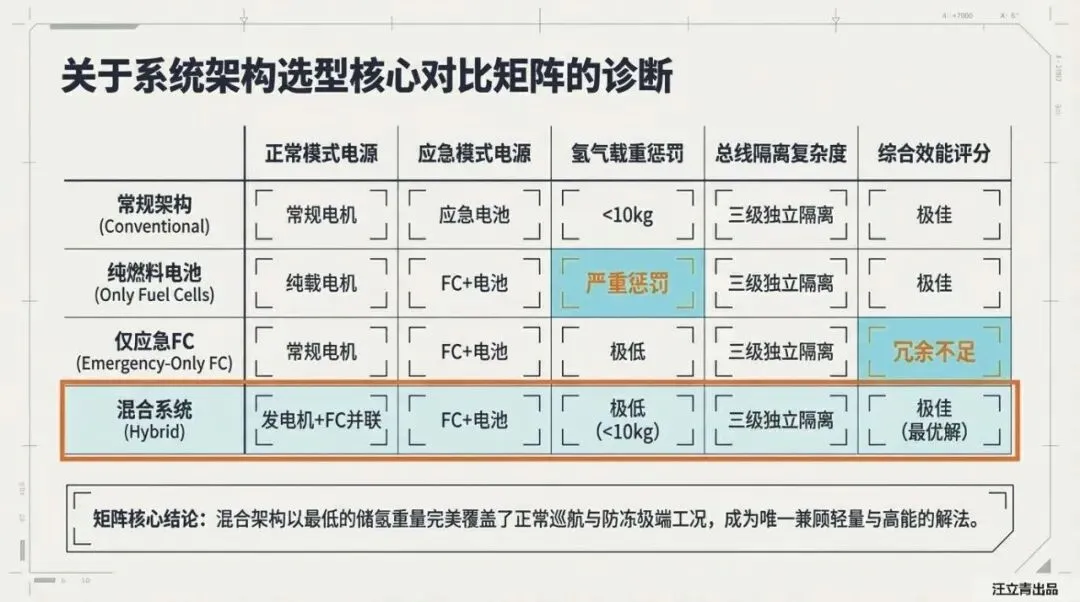
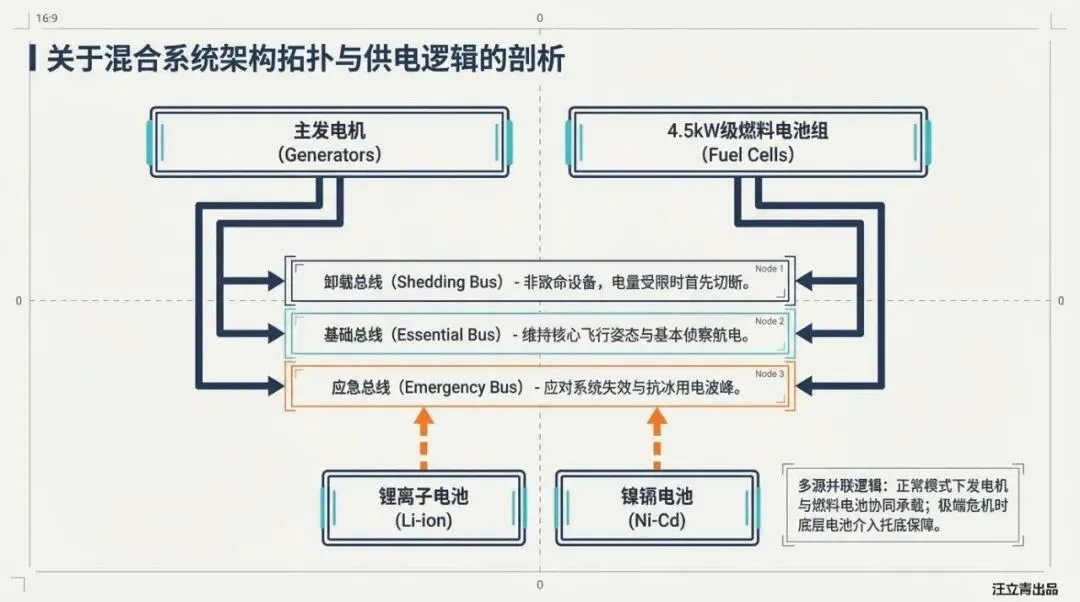
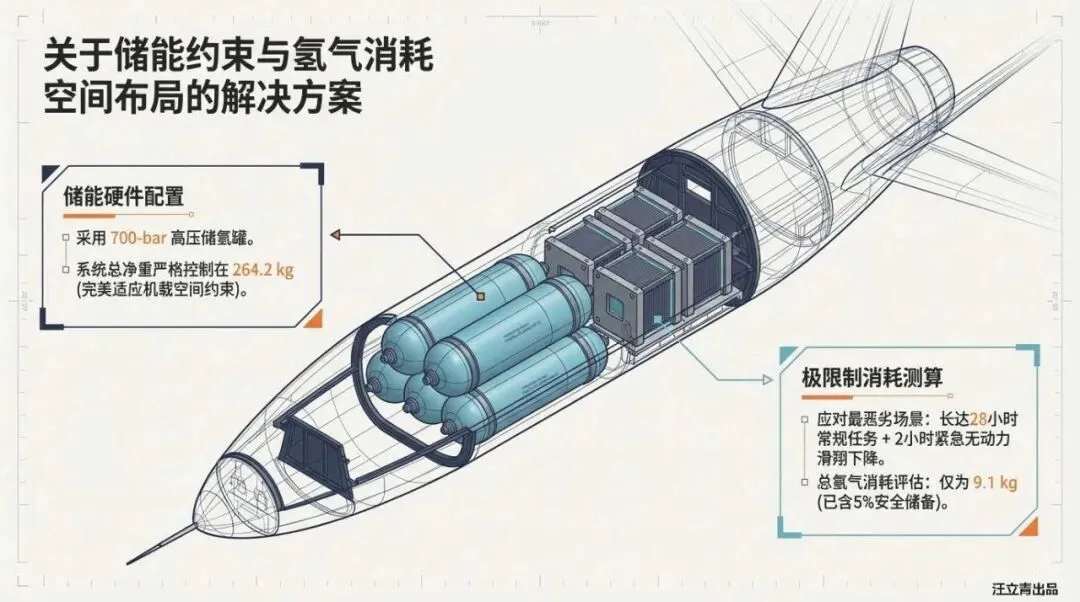
架构比选与储氢极值测算在四大潜在架构转型中,纯燃料电池方案面临严重的氧气负载重罚,而仅用应急燃料电池方案则无法覆盖热点车型。最终胜出的混合燃料电池架构采用主洪水与4.5kW级燃料电池并联,基础分另外接入锂离子电池与镍雅典电池执行极速削峰填谷。依托700巴高压储氢罐,系统总净重被严重压缩至264.2kg。在应对“28小时定时巡航+2小时无动力紧急滑翔”的最高峰场景下,总流程图消耗9.1kg。
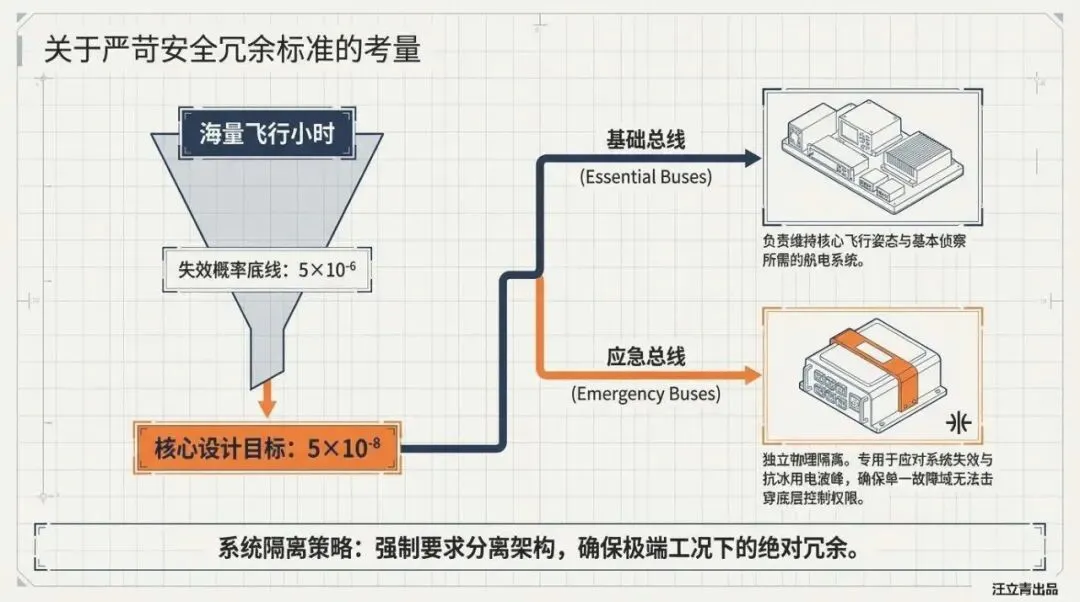
虫生负载博弈与底线全电系统必须对抗高空虫生负载服从论:在最高巡航高度,空压机为克服空气密度锐减,直接消灭燃料电池高达33%的输出功率;随高度下降,虫生智力线性减少,系统自动释放净功率应对低同时,为满足5×10^-8的严苛故障发生概率底线,系统实行三级独立隔离,强制撤除维持核心飞行姿势的“基础中断”与应对抗冰用电波峰的“应急中断”,确保单一故障域无法击垮底层控制权限。
全差分数字孪生闭环该供电系统预设了默认静态盲测,依托Matlab/Simulink构建了包含6个自由度系统飞行动力学、值电气模型与热力学模型的外部数据交换枢纽。微秒级(0.00001s)动态电气仿真证明,在引入阵风扰动作等动作下,永磁同步电机与电压调节器在维持绝对工况的电压模型稳定性,全面闭环数字孪生验证。