「NVIDIA 辅助驾驶与机器人仿真公开课」为第二期。由 NVIDIA 解决方案架构师张思朋、形拓科技技术总监夏湖波两位主讲人参与,分别以《NVIDIA Omniverse™ NuRec 神经重建在辅助驾驶领域的应用》、《基于 NVIDIA Isaac Sim™ 的车企产线巡检机器人仿真测试实践》为主题进行了实时讲解并在线答疑。
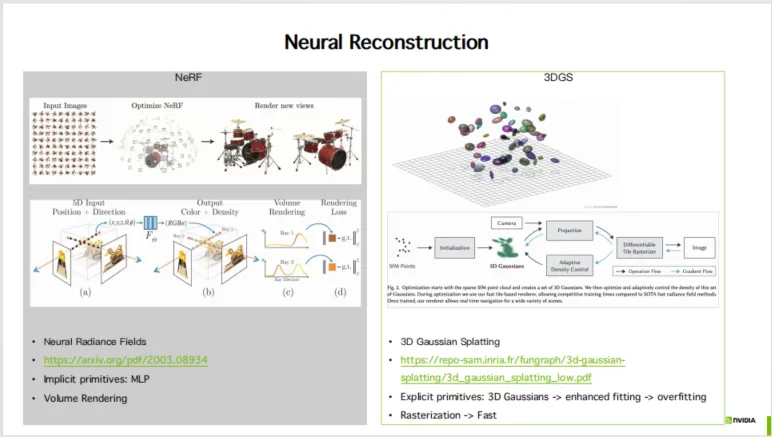
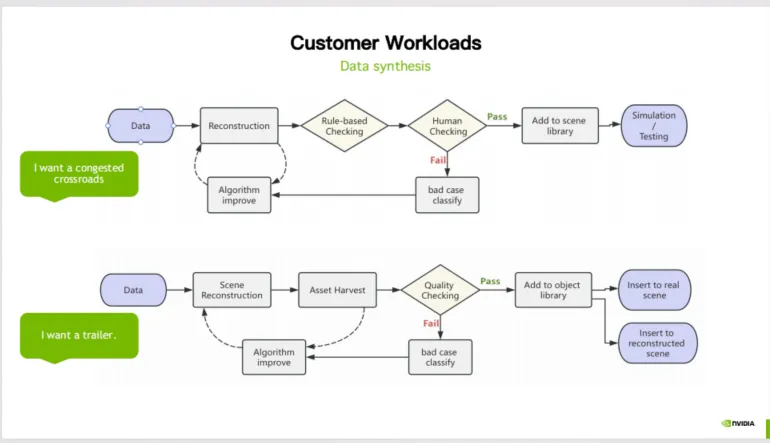
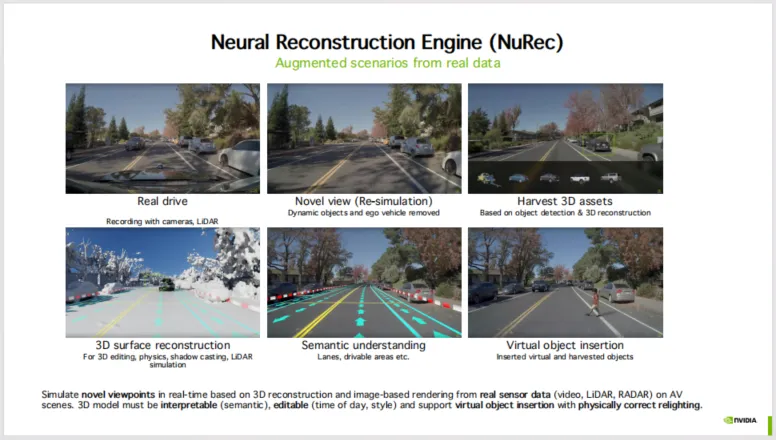
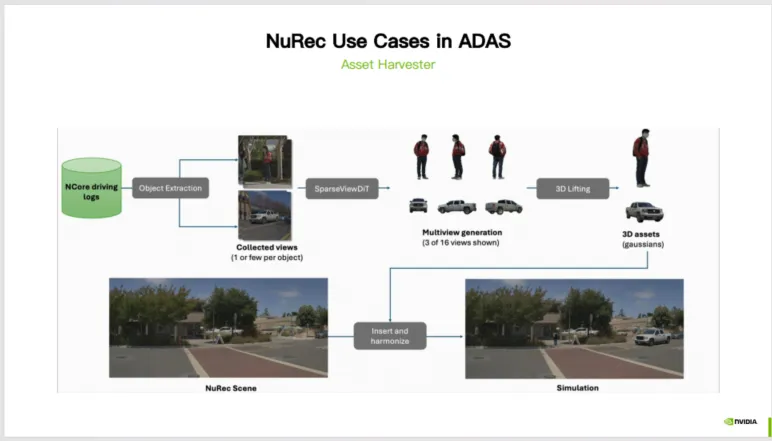
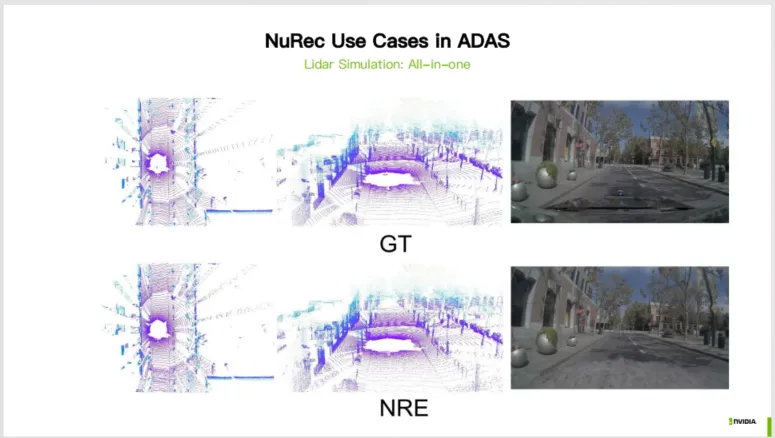
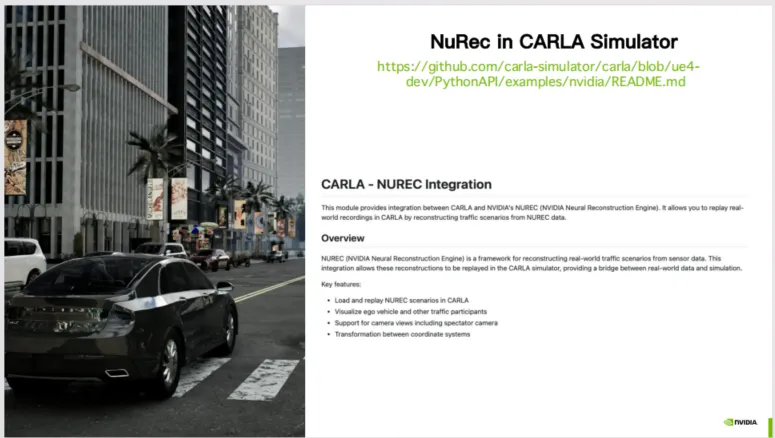
张思朋老师重点介绍了 NVIDIA Omniverse NuRec 的背景、使用需求,以及主要功能和特点。NuRec 是一套基于 NVIDIA Omniverse™ 的用于神经网络重建与渲染的工具集,它通过 3D 高斯神经渲染等技术,将真实世界采集的数据高效重建为可交互的仿真场景,有效解决从真实数据到仿真数据转换的难题。
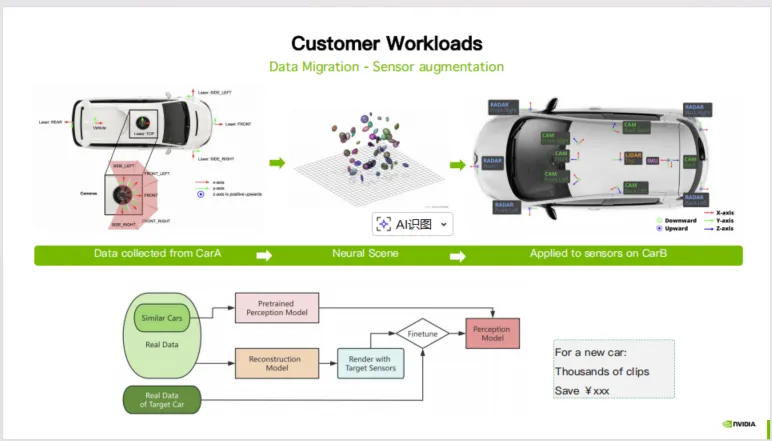
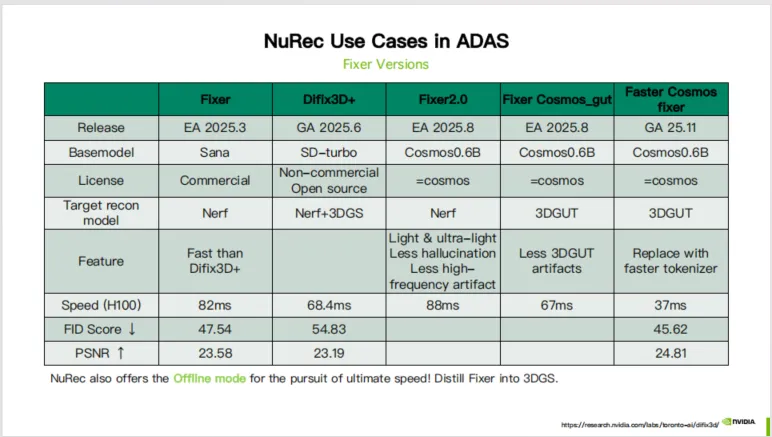
目前,NVIDIA 最新推出的 Omniverse NuRec GA 版本带来了多项关键提升。与前一内部版本相比,端到端场景重建训练时间减少了20%-30%,GPU内存需求已降低至24GB,扩大了硬件兼容性;支持对象级场景编辑,可独立移除、重新定位或替换重建场景中的车辆、行人等动态对象;针对高速公路等长距离、高速度捕捉场景的重建质量也得到有效改进。
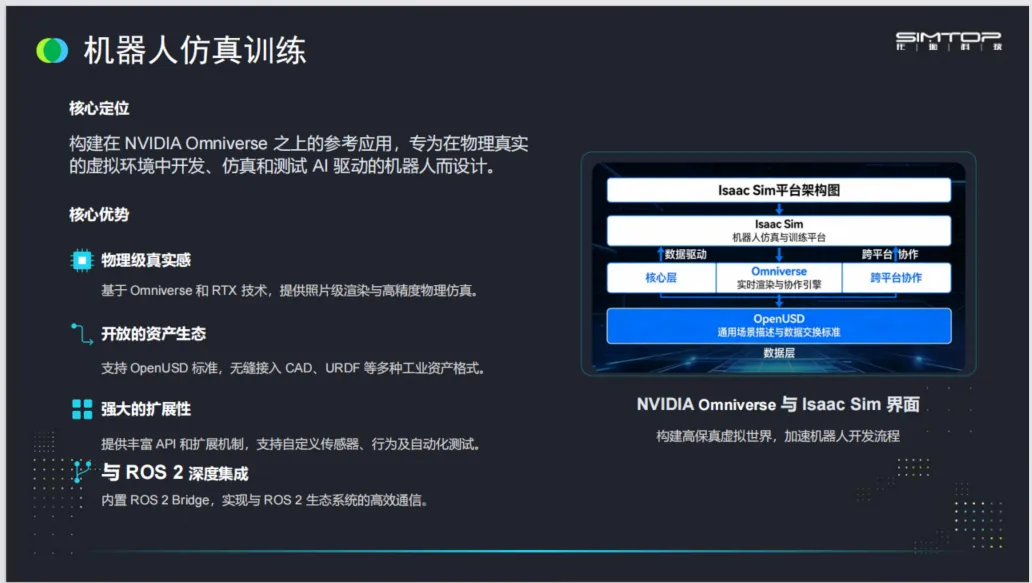
夏湖波老师深入解读了利用 NVIDIA Isaac Sim 平台进行车企产线巡检机器人仿真测试。内容包括机器人配置、ROS 2 集成、传感器定制与噪声模型应用;并展示了通过仿真环境测试巡检机器人在复杂生产线环境中的能力。
错过本次公开课的朋友,可以观看「NVIDIA 辅助驾驶与机器人仿真公开课」完整回放。同时,本次公开课 PPT 已更新至本公众号【智猩猩公开课】,后台回复关键词“NVIDIA2603”可获取。
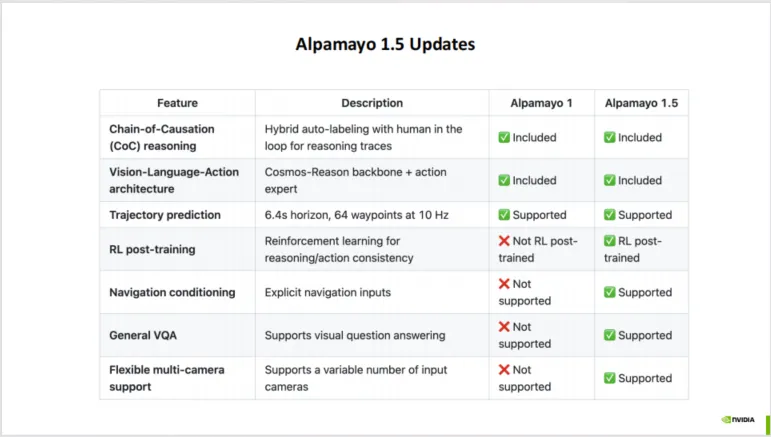
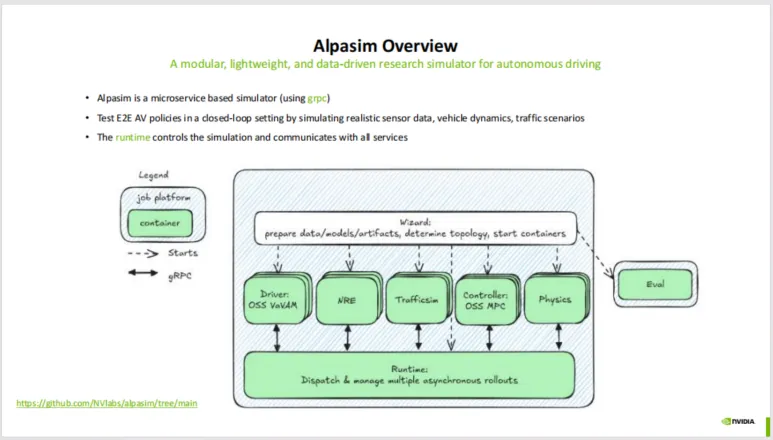
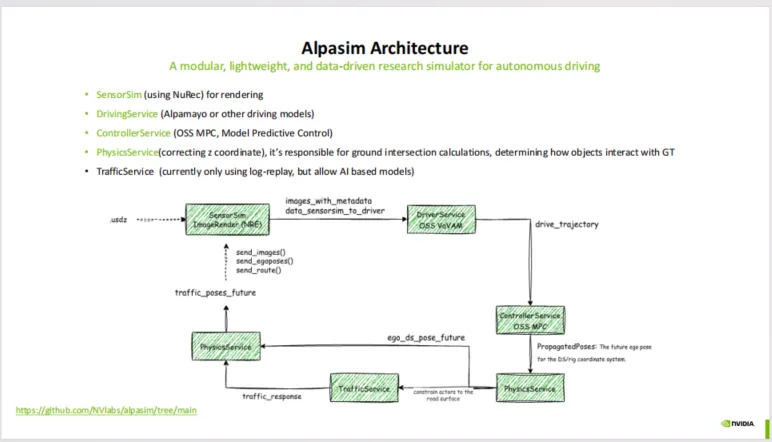
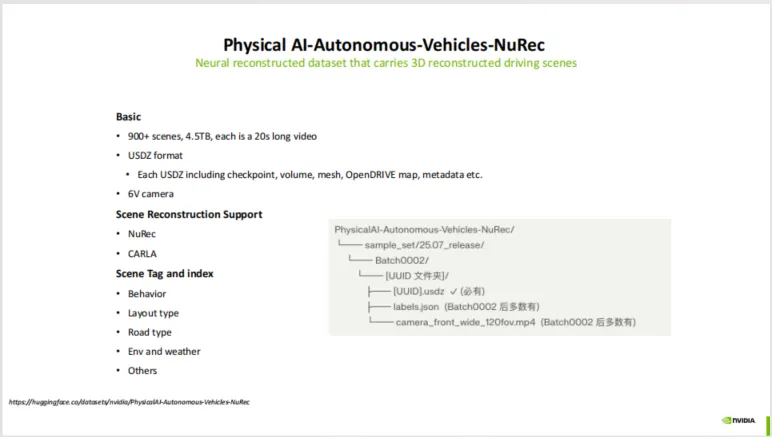
以下精选的是张思朋老师的主讲 PPT: