国家重点研发计划PPT:空天地海一体化无人集群协同控制技术(附源文件)
- 2026-04-09 23:09:10
国家重点研发计划PPT:空天地海一体化无人集群协同控制技术(附源文件)

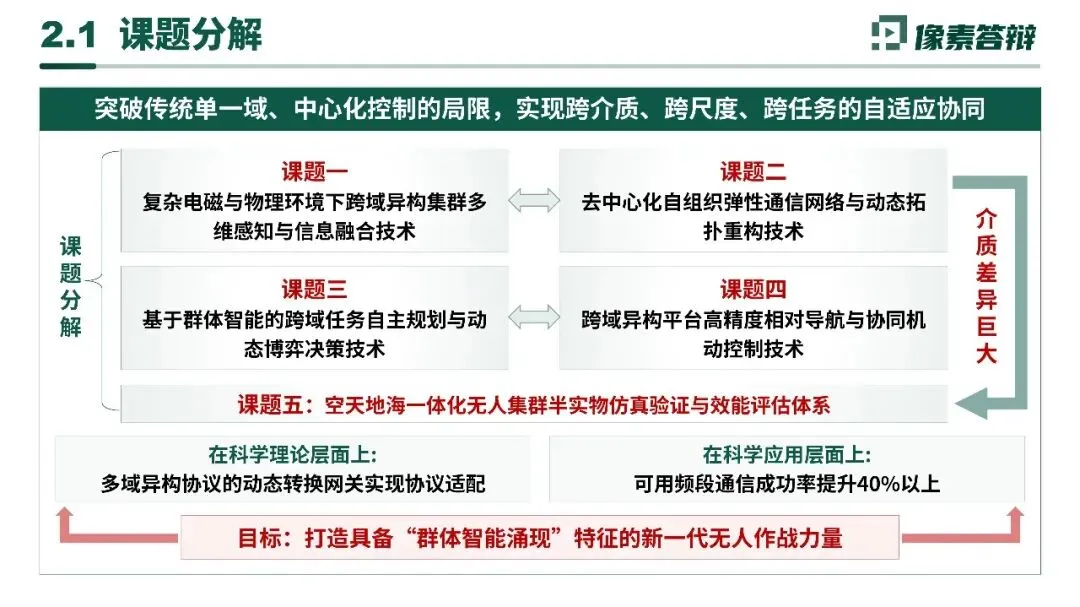
视频预览展示 课题一:复杂电磁与物理环境下跨域异构集群多维感知与信息融合 课题二:去中心化自组织弹性通信网络与动态拓扑重构技术 课题三:基于群体智能的跨域任务自主规划与动态博弈决策技术 课题四:跨域异构平台高精度相对导航与协同机动控制技术 课题五:空天地海一体化无人集群半实物仿真验证与效能评估体系 

整套PPT共计 18 页,源文件均可编辑和修改 PPT制作相关服务,请后台留言, 或者扫码联系我们,微信:xsys09177 

#科研##学术##学术答辩##教授##科技计划项目##国家重大专项##重点项目申报
关注公众号
发送“模板”二字
可获取PPT模板分享方式
已关注
关注
重播 分享 赞
1
重点研发计划项目PPT案例解析
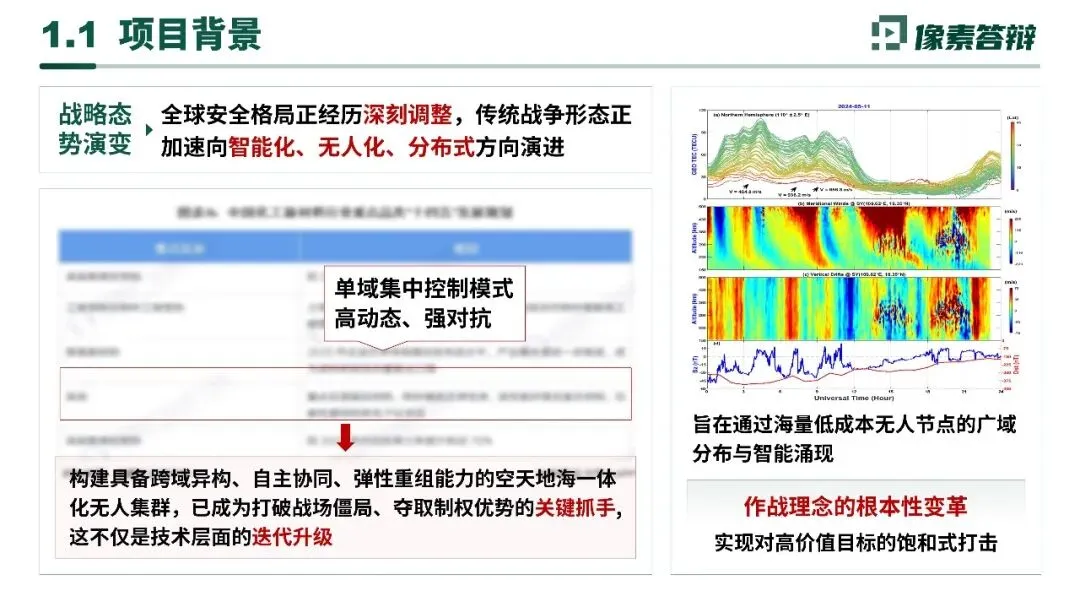
一、项目背景与意义
- 战略需求
全球战争形态向智能化、无人化、分布式演进,传统单域集中控制模式已无法适应高动态、强对抗战场,构建跨域自主协同无人集群是夺取制权的核心抓手。 - 作战变革
通过海量低成本无人节点的广域分布与智能涌现,实现对高价值目标的饱和式打击,推动作战理念根本性变革。
二、课题分解与核心技术
项目突破传统中心化控制局限,分解为 5 个核心课题,形成完整技术链条:
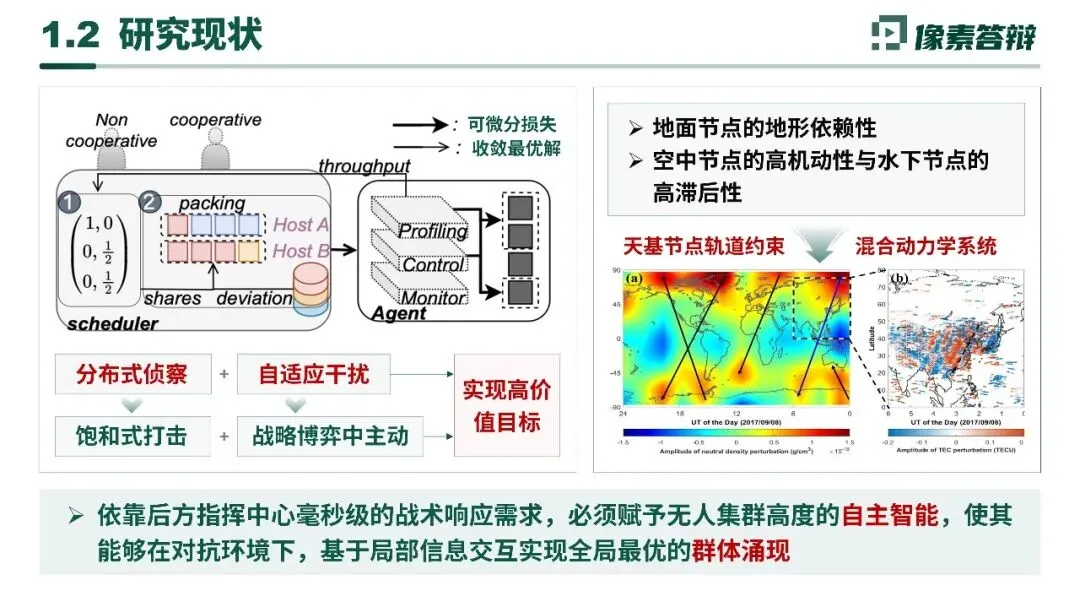
三、关键技术突破
1. 动态拓扑重构技术
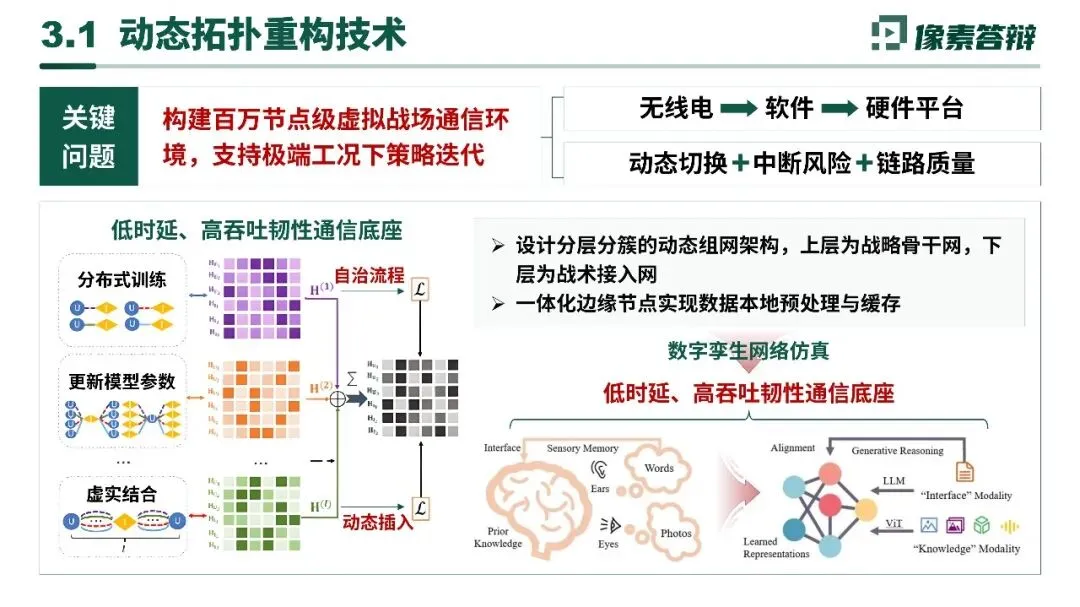
构建百万节点级虚拟战场通信环境,支持极端工况下策略迭代。 设计分层分簇动态组网架构,通过一体化边缘节点实现数据本地预处理与缓存,打造低时延、高吞吐韧性通信底座。 融合数字孪生网络仿真,实现无线电 - 软件 - 硬件平台的全链路协同,应对动态切换、中断风险与链路质量波动。
2. 协同机动控制技术
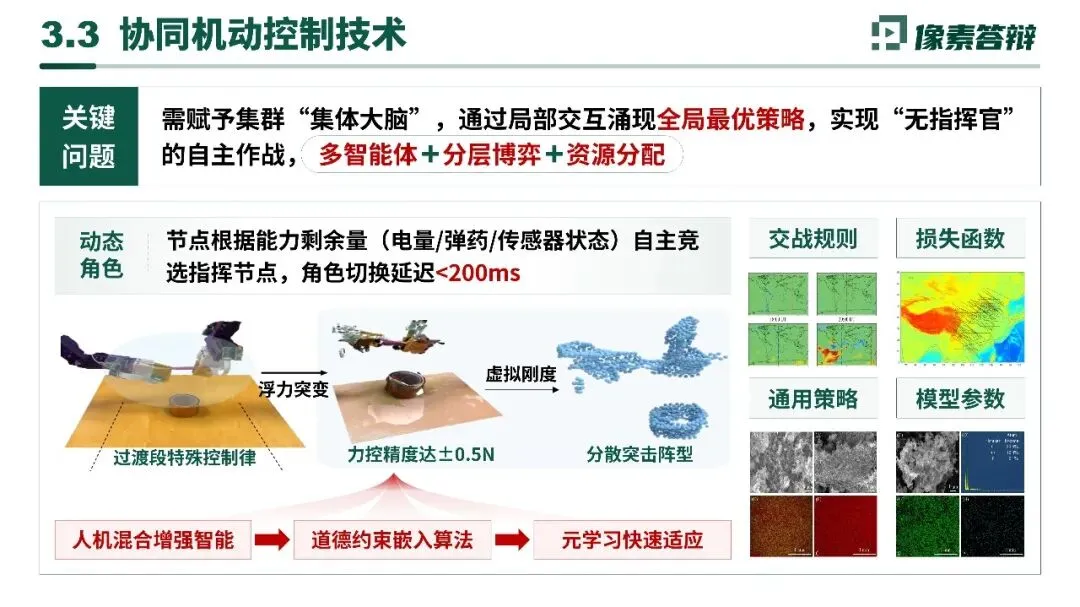
赋予集群 “集体大脑”,通过局部交互涌现全局最优策略,实现 “无指挥官” 自主作战。 节点可根据电量 / 弹药 / 传感器状态自主竞选指挥节点,角色切换延迟 < 200ms;力控精度达 ±0.5N,支持分散突击阵型与过渡段特殊控制律。 融合人机混合增强智能,嵌入道德约束算法,通过元学习实现快速环境适应。
四、工作基础与预期成果
- 前期积累
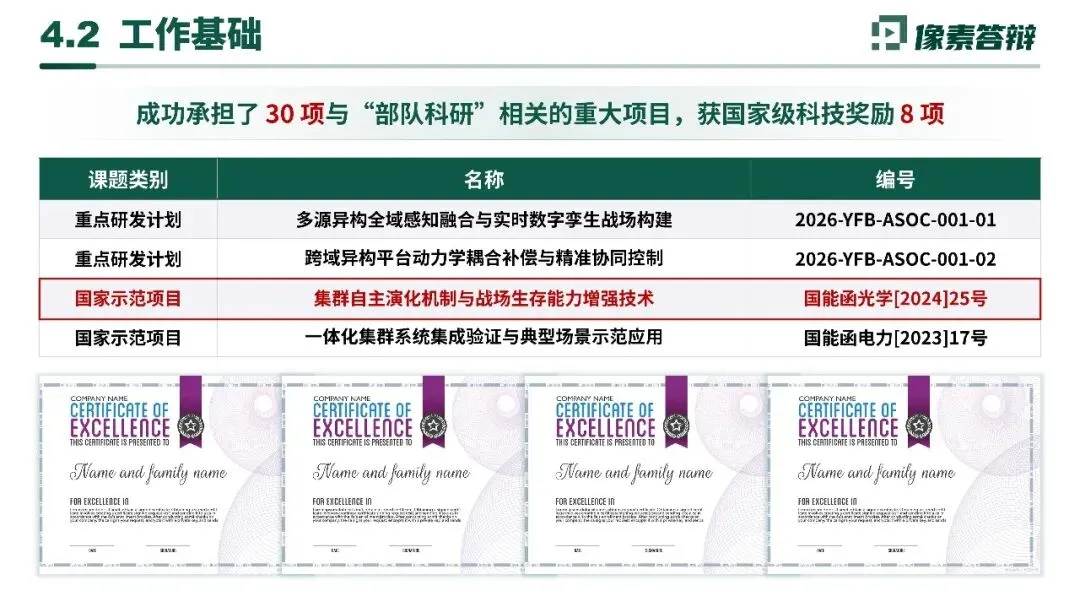
已承担 30 项部队科研重大项目,获国家级科技奖励 8 项,包括 “集群自主演化机制与战场生存能力增强技术” 等国家示范项目。 - 理论创新
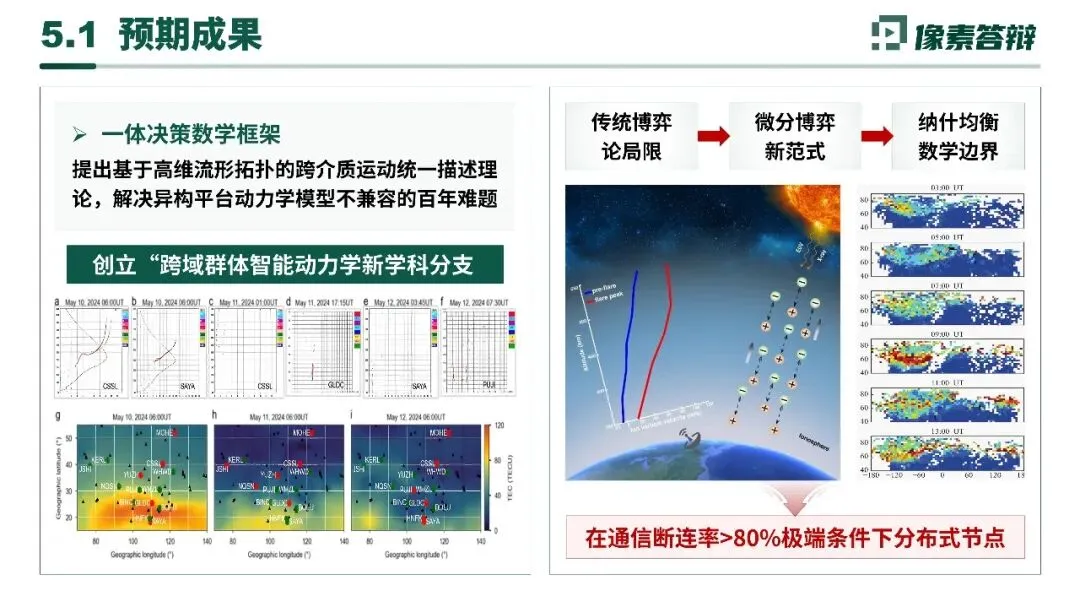
提出基于高维流形拓扑的跨介质运动统一描述理论,创立“跨域群体智能动力学” 新学科分支,解决异构平台动力学模型不兼容难题。 - 性能突破
在通信断连率 > 80% 的极端条件下,仍能保障分布式节点可靠协同;可用频段通信成功率提升 40% 以上。
五、风险分析与应对
六、应用价值
本项目将打造具备“群体智能涌现”特征的新一代无人作战力量,支撑国防安全与装备自主可控,同时可拓展至海洋勘探、应急救援、智慧城市等民用领域,具备广阔的军民融合前景。
2
PPT模板展示
3
答辩服务及模板获取
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

