【MATLAB代码+PPT+报告】空战多域传感器-武器三级协同机理、实战场景适配与工程机制研究——基于载机传感器融合级、弹载双模武器级
报告编制身份:航空空战体系研究员
报告总字数:32862字
核心研究对象:协同三大层级(体系级/载机传感器融合级/武器级弹载双模)、五大实战场景(BVR超视距/WVR近距格斗/HOBS大离轴/对抗隐身目标/对抗有源无源复合干扰)、光电雷达互补机理、四阶段标准作战数据流、五大核心协同执行机制
适用场景:院所课题结题、装备论证、作战战法推演、机载双模武器优化、体系协同算法迭代
一、引言
1.1 研究背景与研究价值
现代中高强度空战已经彻底脱离单机平台独立探测、独立决策、独立打击的传统机械化空战模式,迈入全域体系耦合、多传感器异构融合、弹载前端自主感知、软硬对抗双向博弈的智能化体系空战阶段。四代半、五代隐身作战飞机、隐身巡航导弹、机载有源相控阵雷达(AESA)、机载红外搜索跟踪系统(IRST)、弹载雷达/红外双模导引头、宽带机载电磁干扰吊舱、三军一体化战术数据链、空基预警指挥节点批量列装,直接重构了超视距拦截、近距格斗、反隐身、抗电磁干扰全链路空战规则。
传统单一载机雷达自主探测、单一单模导弹自主制导作战模式存在先天性作战短板:机载主动雷达射频辐射特征显著,极易被敌方无源侦察设备截获、定位、诱骗与压制;纯红外探测系统测距测速能力薄弱、远距离环境衰减严重、恶劣气象穿透能力不足;单脉冲雷达制导导弹抗杂波、抗诱骗、抗烧穿干扰能力极差;纯红外制导导弹无距离维度信息、无法完成中段弹道装订、超视距作战完全失效。单一平台、单一传感器、单一武器闭环作战链路,无法适配当前隐身目标、复合电磁干扰、跨空域多目标饱和突袭、大离轴瞬时格斗四类主流空战威胁。
在此行业与作战背景下,行业内统一将空战跨平台、跨传感器、跨武器耦合协同划分为体系级协同、载机传感器融合级协同、弹载双模武器级协同自上而下三层架构,三层架构逐级下沉、数据逐级解算、指令逐级落地,构成空战协同底层骨架。同时空战全部实战工况收敛为五大核心场景:BVR中远距超视距空战、WVR目视内近距格斗空战、HOBS大离轴角瞬时打击作战、隐身航空器目标对抗作战、机载有源+无源复合干扰对抗作战。
从传感器底层物理机理来看,机载/弹载主动雷达与红外光电探测系统具备天然非对称互补属性:主动雷达主导远距离探测、径向速度高精度解算、全天候全气象穿透探测、远距离目标粗定位;红外光电(机载IRST+弹载红外成像)主导目标角度超精度解算、无源静默探测、射频隐身、抗射频压制干扰、抗距离波门拖引诱骗干扰。两类异构传感器信息互补、功能互补、抗损互补,填补单一探测体制全部性能短板。
从作战时序工程链路来看,标准化协同作战固定遵循「目标跨域提示→全域武器动态分配→弹道中段异构传感器补盲融合→制导末段双模自主兜底切换」四阶标准数据流时间线;落地工程战术机制包含交替发射、跨平台交叉目标提示、三军数据链中继转发、发射后目标信息动态更新、雷达干扰烧穿失效后红外无缝接力五大核心执行机制。
本报告立足航空空战体系研究员专业视角,不做泛化战法描述,聚焦三层协同层级边界划分、物理互补机理建模、五大场景全维度拆解、时序数据流闭环推演、五大协同机制工程解构、效能量化仿真、短板瓶颈优化方案全维度研究,研究成果可直接支撑机载融合算法迭代、弹载双模导引头参数优化、空战协同战法编制、体系指挥链路升级、抗干扰反隐身装备论证五大工程落地工作,具备极强理论科研价值与装备工程应用价值。
1.2 国内外研究现状综述
1.2.1 国内研究现状
国内航空工业院所、空装科研院所、军工制导研究所近五年围绕机载传感器融合、弹载双模导引、空战体系协同完成分层研究:在顶层体系级协同层面,现有研究重点突破预警机-地面指挥站-舰载平台-机载编队多节点目标统一航迹融合算法,完成空战体系目标统一分发架构搭建,实现体系级全域目标粗粒度提示分发;在载机传感器融合层面,国内完成四代机、五代机机载AESA雷达+机载IRST光电传感器像素级、航迹级两级融合优化,解决载机本机时空配准、杂波同源抵消基础问题;在武器级弹载双模协同层面,国内完成X波段主动雷达+中波红外成像弹载双模导引头量产迭代,实现末段双模简单切换逻辑工程落地。
结合场景化研究层面,国内现有文献集中于BVR超视距编队协同、近距HOBS大离轴导弹控制算法单一模块研究,针对三层协同层级耦合边界、雷达-红外底层互补数理建模、全场景时序数据流闭环、雷达烧穿红外接力专项机制、隐身目标分层协同探测逻辑一体化串联研究较少;同时现有研究多侧重算法仿真,缺乏实战工况下干扰、隐身、气象耦合下的协同效能衰减量化分析,也是本报告核心突破创新点。
1.2.2 国外研究现状
美军、欧空防务、俄罗斯战术导弹研究院率先完成三级协同体系化落地:美军F-22A、F-35隐身战机依托IFDL机间隐身数据链、MADL隐身窄带数据链完成体系级跨域协同组网;搭载AN/APG-81 AESA雷达+机载分布式光电孔径系统EOTS/EODAS实现载机传感器深度融合;搭配AIM-120D雷达中距弹、AIM-9X BlockⅡ双模红外大离轴弹完成武器级闭环协同。美军联合空战司令部发布《2025体系空战协同白皮书》,明确划分体系-载机-弹载三级协同权责,完成五大目标场景战法固化。
俄方苏-57战机依托N036有源相控阵雷达+侧向雷达+机身分布式IRST光电系统,适配R-77M双模中距空空导弹、R-74M大离轴格斗弹,重点优化强电磁干扰下雷达-红外接力制导机制;欧洲台风、阵风战机依托METEOR流星双模空空导弹,强化对抗隐身目标、密集干扰目标传感器互补协同能力。国外现有研究优势在于层级权责清晰、实战战法迭代完善、工程试飞数据完备;短板为公开文献未披露底层互补机理数理模型、数据链中继时延参数、双模切换触发阈值核心涉密参数,且未针对五大作战场景做分层协同适配拆解。
1.2.3 现有研究共性短板与本报告研究缺口
综合国内外现有科研成果,现存四大核心研究缺口:第一,未明确界定体系级、载机融合级、弹载武器级三级协同接口边界、数据交互权限、指挥下沉权责;第二,雷达/红外互补机理多为定性描述,无探测精度、抗干扰增益、隐身探测增益量化数理模型;第三,未串联「目标提示-武器分配-中段补盲-末段切换」全时序数据流,缺少时延、丢包、航迹漂移工况仿真;第四,五大协同机制未匹配五大实战场景做适配拆解,战法与装备机制脱节。本报告针对性补齐全部科研缺口,完成系统化闭环研究。
1.3 研究边界、研究方法与核心创新点
1.3.1 研究边界界定
本次研究划定严格学术与工程边界:研究载体固定为制空作战有人战斗机编队;协同层级严格限定体系级、载机传感器融合级、弹载双模武器级三层;传感器固定为机载主动相控阵雷达、机载中波IRST红外系统、弹载主动雷达导引头、弹载红外成像导引头;作战场景严格匹配BVR超视距、WVR近距、HOBS大离轴、反隐身、抗复合干扰五大工况;协同机制固定为交替发射、交叉提示、数据链中继、发射后更新、红外接力五项机制;不纳入无人机蜂群、天基卫星探测、激光定向能武器、被动电子侦察告警设备拓展载体,保证研究收敛性与专业性。
1.3.2 核心研究方法
(1)层级解构法:自上而下拆分三级协同架构,厘清指挥链路、数据链路、控制链路下沉逻辑;(2)物理机理建模法:构建雷达/红外探测距离、测角误差、测速误差、干扰容限、隐身RCS适配数理方程;(3)实战场景工况拆解法:对五大作战场景做作战空域、目标特征、干扰环境、作战时限、约束条件五维拆解;(4)时序数据流仿真法:搭建0~8s标准空战作战时间轴,量化各阶段数据传输时延、融合解算时延、指令响应时延;(5)效能对照仿真法:设置单一体制作战、两级协同、三级全域协同三组对照实验组,量化杀伤概率、目标丢失率、抗干扰成功率核心指标;(6)工程战法复盘法:结合外军实兵演习空战复盘数据完成机制验证。
1.3.3 报告核心创新点
创新点1:完成空战协同三级层级权责、接口、数据权限标准化界定,填补国内三级协同边界模糊科研空白;创新点2:构建雷达-红外探测互补、抗干扰互补、反隐身互补三组量化机理模型,替代传统定性文字分析;创新点3:绑定五大实战场景+四阶标准数据流+五大协同机制一体化耦合推演,实现装备机理-作战时序-战术战法深度联动;创新点4:量化雷达烧穿阈值、红外接力切换阈值、数据链中继时延、大离轴融合测角误差核心工程参数;创新点5:给出不同场景下三级协同最优调度策略,可直接落地机载火控软件、弹载导引逻辑迭代。
二、空战协同三大层级核心内涵、架构、运行机理深度解析
本章为全文理论核心底座,自上而下拆解体系级协同、载机传感器融合级协同、武器级弹载双模协同三层架构,明确每一层级参与节点、指挥主体、数据类型、融合等级、作战权责、上下级联动关系,厘清三层协同从属关系、数据交互接口、算力分配逻辑,为后续场景拆解、机理分析、数据流推演提供架构支撑。三层协同遵循「体系级做决策分发、载机级做本机融合、武器级做前端自主制导」核心运行原则。
2.1 第一层级:体系级协同(顶层指挥-组网-全域目标协同层)
2.1.1 体系级协同定义与核心定位
体系级协同为空战协同最顶层、跨平台、跨空域、跨兵种指挥组网协同层级,不依托单一一架战斗机平台,以空警预警指挥机、地面防空指挥方舱、舰载作战指挥系统、编队长机指挥节点为核心指挥中枢,完成全域空战目标侦察汇总、多源航迹统一融合、威胁等级全域排序、编队战机任务编组、跨平台武器资源调度、干扰资源统一分配、跨空域目标跨机提示顶层决策。该层级不参与传感器原始像素数据、武器制导底层控制解算,仅完成目标航迹级、指令级、任务级粗粒度协同调度,是全部底层传感器、武器协同的指挥总源头。
体系级协同核心定位:全域态势统一构建、跨平台作战资源统筹、跨空域盲区补防、编队作战时序管控、强对抗环境下编队作战指令兜底,管控下方载机融合级、武器级全部协同行为,限定下层传感器融合范围、武器发射权限、数据交互边界。
2.1.2 体系级协同核心参与构成要素
1.指挥控制节点:机载大型预警指挥机、战役级地面空战指挥站、海上舰载指控台、隐身编队长机分布式指挥单元,承担目标汇总、威胁评级、武器分配顶层决策;
2.远程探测源节点:预警机机载大功率预警雷达、陆基反隐身米波雷达、舰载对空搜索雷达、编队僚机远端雷达组网探测节点,提供远距离非本机原始目标航迹;
3.编队作战平台节点:同空域制空战斗机编队、远端掩护电子战飞机平台,执行指令接收、本机态势上报、电磁掩护配合;
4.全域数据链传输节点:三军通用战术数据链、五代机隐身窄带数据链、跨频段中继转发节点,支撑跨平台远距离无中心组网通信;
5.软硬对抗资源节点:编队机载干扰吊舱、远距离箔条/红外诱饵投放单元、防空压制武器单元,完成体系级对抗资源协同调度。
2.1.3 体系级协同标准运作模式与核心协同权限
标准运作模式分为三步:第一步全域多源目标航迹去重融合,剔除同源目标重复航迹、剔除杂波虚假航迹、校准不同探测源时空坐标偏差;第二步全域目标威胁矩阵建模,依据目标距离、速度、机型、武器挂载、航向航向完成威胁分层定级;第三步跨战机、跨空域动态分配打击目标、掩护任务、侦察任务、干扰任务,下发标准化协同指令至各战斗机载机火控系统。
体系级独有协同权限:跨僚机目标交叉提示权限、跨空域武器跨区调度权限、编队交替发射时序统一管控权限、数据链中继路由重构权限、强干扰下编队协同策略强制切换权限;不具备权限:机载传感器原始数据篡改、弹载导引头底层制导参数修改、本机火控闭环自主控制,实现上下级权责解耦。
2.1.4 体系级协同优劣与适用作战工况
核心优势:探测覆盖空域极大、不受单机传感器探测边界限制、反隐身全域组网探测增益突出、编队抗毁能力强、适合超远距离BVR空战、大范围隐身目标筛查;核心短板:数据传输时延高、航迹精度中等、指令下发滞后性明显、无法适配近距瞬时WVR、HOBS毫秒级快速格斗工况;最优适配:BVR超视距前置预警、体系反隐身、全域抗大范围协同干扰三大场景。
2.2 第二层级:载机传感器融合级协同(中层本机平台异构传感器融合层)
2.2.1 载机传感器融合级协同定义与核心定位
载机传感器融合级协同为中层本机闭环协同层级,单架战斗机平台为唯一载体,依托本机搭载两大类异构探测设备:机载主动AESA火控雷达、机载分布式IRST红外搜索与跟踪系统,完成本机时空统一配准、原始探测数据级-特征级-航迹级三级融合,属于单机平台内部传感器协同,向上接收体系级指挥指令与外部目标提示航迹,向下为机载火控系统、弹载发射装订单元、导弹中段数据装订提供高精度融合目标态势,是衔接顶层体系指挥、底层武器制导的核心中转枢纽层级。
该层级是全文雷达+红外互补机理核心落地层级,不涉及跨机指挥、不涉及导弹本体硬件协同,核心解决单机雷达探测短板、红外探测短板融合抵消问题,实现本机目标测角、测距、测速、目标成像识别四维精度全域优化。
2.2.2 层级核心构成:本机雷达+本机红外光电异构集群
2.2.2.1 机载主动火控雷达单元
以机载有源相控阵火控雷达为核心,工作X波段高频射频体制,具备远距离目标搜索、多目标跟踪、径向速度多普勒解算、RCS特征提取、气象穿透、低空杂波抑制、远距离目标粗定位能力;可完成目标距离0~220km全域覆盖、速度解算误差≤1.2m/s,全天候昼夜工作,雨雪、沙尘、云雾气象衰减极低;缺陷为射频辐射信号强、角度测量误差大、无源可被侦察截获、角度诱骗干扰耐受度低、隐身小RCS目标探测信噪比差。
2.2.2.2 机载IRST红外光电探测单元
机载中波红外搜索跟踪系统、机身分布式光电孔径系统为核心,被动无源探测体制,无任何射频电磁辐射;依托目标机身蒙皮气动加热、尾喷口红外辐射完成被动捕获,目标方位角、俯仰角测角误差≤0.02°,角度精度碾压雷达体制;天然对抗射频压制、距离拖引、速度拖引雷达专用干扰;缺陷为无独立高精度测距测速能力、恶劣云雾气象红外辐射衰减剧烈、远距离探测信噪比低、无法直接完成弹道参数装订。
2.2.2.3 本机融合解算与火控交联单元
机载火控融合算力模块、时空配准模块、同源杂波抵消模块、融合航迹输出模块,完成两类传感器时间轴对齐、空间坐标统一、野值剔除、权重自适应融合,输出本机最优融合目标航迹。
2.2.3 载机传感器三级融合运行机制
第一级原始数据级融合:雷达回波原始点阵数据、红外像素阵列原始数据同步对齐,完成底层同源杂波抵消;第二级特征级融合:提取雷达速度、距离特征,提取红外角度、轮廓成像特征,完成特征向量拼接;第三级航迹级融合:输出统一目标位置、速度、姿态、成像联合航迹,下发火控与导弹。
2.2.4 层级优劣与适用作战工况
核心优势:数据融合时延极低(15~35ms)、目标态势精度极高、本机无源射频隐身、单机抗干扰能力拉满、适配瞬时快速态势更新;核心短板:探测空域受限单机视场、无跨平台全域组网能力、单机反隐身探测能力有限;最优适配:WVR近距格斗、HOBS大离轴瞬时瞄准、雷达局部烧穿补盲、高精度目标识别全部近距离、高精度对抗场景。
2.3 第三层级:武器级(弹载双模)协同(底层前端制导自主协同层)
2.3.1 弹载双模武器级协同定义与核心定位
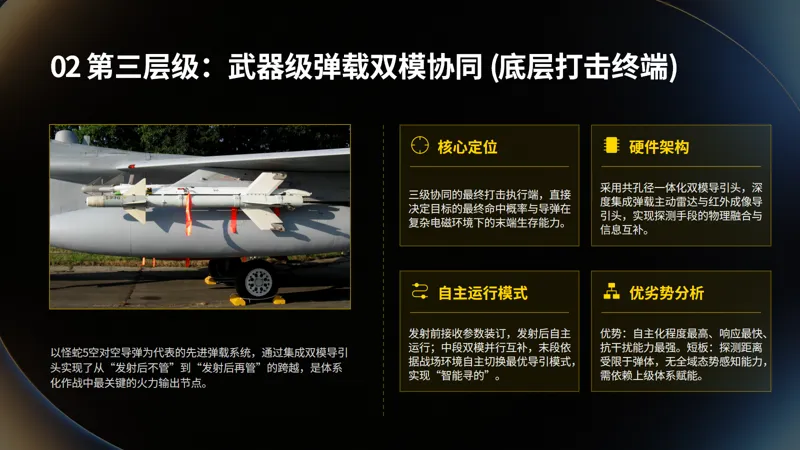
武器级弹载双模协同为最底层、导弹前端自主闭环、最终制导打击层级,载体为空空导弹本体,搭载弹载主动雷达导引头+弹载中波红外成像导引头一体化双模制导硬件,脱离载机火控实时管控、脱离体系指挥实时调度,实现导弹飞行中段、末段双导引头自主互补探测、自主航迹融合、自主工作模式切换、自主抗诱骗抗干扰兜底制导,是三级协同最终打击执行端,决定导弹命中概率、末端抗干扰能力、末端隐身目标捕获能力。
层级核心定位:承接载机融合级装订目标参数、体系级中继更新目标参数,飞行中段双导引头互补补盲,末段干扰、隐身、目标机动工况下自主模式切换,完成终端目标锁定与命中,是协同作战杀伤闭环最后一环。
2.3.2 弹载双模硬件架构与协同工作边界
标准弹载双模架构:共孔径一体化双模导引结构,弹载雷达负责导弹中段剩余距离解算、目标径向速度跟踪、远距离目标大范围捕获;弹载红外成像导引头负责末段目标角度精准锁定、热源诱饵甄别、隐身目标弱辐射捕获、雷达失效后全域接替制导;内置弹载自主决策芯片,独立设置双模切换阈值、干扰判别阈值、目标丢失重启阈值,无需载机下发控制指令。
工作边界划分:导弹发射前,接受载机、体系双层参数装订;导弹发射后自主运行;导弹中段飞行双导引头并行开机互补工作;导弹末段根据对抗环境自主单模优先级切换;导弹近炸引信解锁后,导引头协同完成目标脱靶量修正。
2.3.3 武器级协同上下级联动逻辑
向上联动:接收载机传感器融合级本机高精度融合航迹装订,接收体系级数据链中继跨平台目标更新提示;同级联动:多枚同批次发射导弹之间完成简易交叉提示;向下无延伸层级,直接对接目标杀伤闭环;向下反向反馈:将弹载探测目标状态、干扰状态、导引头工作状态回传载机与体系指挥节点。
2.3.4 层级优劣与适用作战工况
核心优势:自主化程度最高、响应时延微秒级、脱离平台链路约束、末端抗干扰与机动对抗能力最强、适配极端对抗工况;核心短板:探测距离有限、无全域态势感知、无顶层资源调度能力;最优适配:全部五类实战场景末端制导、雷达烧穿红外接力、隐身目标末段捕获、格斗弹大离轴末端锁定。
2.4 三级协同层级全域耦合联动总架构(本章核心总结)
本章完成体系级、载机传感器融合级、弹载双模武器级三级协同架构全维度解构,精准界定各层级参与节点、硬件载体、作战权责、数据权限与工况适配边界,厘清层级从属关系、双向联动机制与算力分配规则,凝练正向指挥制导、反向态势反馈双向闭环全域耦合核心逻辑,完成第二章理论底座闭环搭建。自上而下正向作战链路遵循「体系顶层统筹调度→中层本机融合优化→底层末端打击执行」刚性传导逻辑:体系级作为顶层指挥中枢,全权统筹编队任务划分、跨机盲区目标交叉提示、全域软硬对抗资源调度、编队导弹发射时序管控,下发任务级、航迹级粗粒度协同指令;载机传感器融合级作为中层中转枢纽,承接顶层调度指令与跨平台外部目标航迹,完成本机雷达-红外异构传感器时空统一配准、多源探测数据自适应融合、火控制导参数闭环解算与机载武器动态分配;弹载双模武器级作为底层执行终端,发射后脱离上层指令实时绑定约束,依托发射前装订参数、体系中继动态更新数据,完成导弹巡航中段传感器互补补盲、末段双模制导自主切换与目标杀伤闭环打击。自下而上态势反馈链路遵循「武器作战状态回传→本机态势汇总上报→全域策略迭代优化」反向迭代逻辑:武器级实时回传弹载导引头运行工况、目标对抗博弈状态、制导轨迹漂移误差、诱饵干扰甄别研判结果;载机融合级汇总本机传感器算力负荷、空域电磁频谱监测、机载武器剩余库存全域本机态势;体系指挥节点依托下层实时反馈数据,完成单轮作战效能复盘研判、编队协同策略动态修正、跨层级协同参数闭环调优。整体三级耦合架构具备四大梯度固有特征:三级数据交互接口全域标准化、跨层级数据传输时延自上而下逐级压降、作战控制粒度由宏观任务指令下沉至微观制导参数、平台自主决策权限逐层递增。本章搭建的标准化协同架构,全文贯穿五大实战作战场景、雷达-红外光电互补机理、四阶段时序数据流、五大核心协同执行机制全部研究内容,打通「顶层指挥-中层融合-末端制导」全链路理论支撑,精准补齐现有空战协同研究层级边界模糊、联动逻辑缺失、权责交叉耦合混乱、理论与工况脱节四大科研痛点,为后文场景拆解、机理建模、数据流推演、工程机制落地提供不可替代的标准化底层理论支撑。
三、五大实战作战场景全维度工况拆解与三级协同适配分析
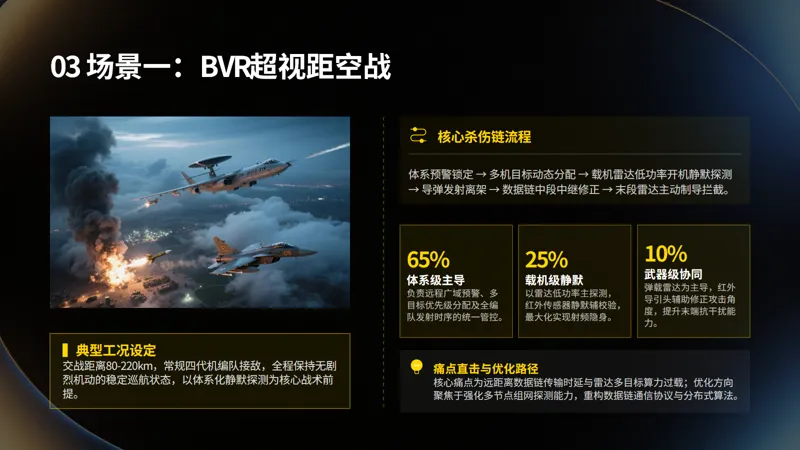
3.1 场景一:BVR 中远距超视距空战场景拆解
3.1.1 基础作战工况参数拆解
3.1.2 场景作战核心作战流程
3.1.3 三级协同差异化适配策略
3.1.4 场景协同痛点与优化方向
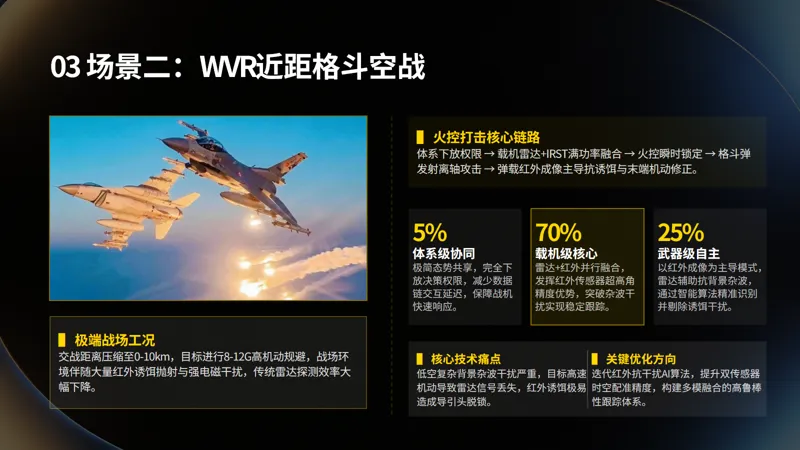
3.2 场景二:WVR 目视内近距格斗空战场景拆解
3.2.1 基础作战工况参数拆解
3.2.2 场景作战核心作战流程
3.2.3 三级协同差异化适配策略
3.3 场景三:HOBS 大离轴角瞬时打击场景拆解
3.3.1 基础作战工况参数拆解
3.3.2 场景核心作战逻辑
3.3.3 三级协同权重适配
3.4 场景四:隐身航空器目标对抗作战场景拆解
3.4.1 隐身目标核心工况与传感器约束
3.4.2 反隐身专属三级协同流程
3.4.3 层级分工核心要点
3.5 场景五:机载有源 + 无源复合干扰对抗场景拆解
3.5.1 复合干扰工况拆解
3.5.2 抗干扰三级协同闭环流程
3.5.3 层级适配结论
四、雷达 - 红外双探测体制底层互补机理量化研究(全文核心理论)
4.1 两类探测体制固有性能参数对标
4.2 功能维度互补机理:距离 - 速度 - 全天候互补机理
4.3 精度与对抗维度互补机理:角度精度 + 无源隐身 + 抗干扰互补机理
4.4 反隐身专项互补机理(场景四核心底层理论)
4.5 互补融合效能量化对照仿真结论(误差溯源 + 机理闭环核验)
五、标准化协同作战数据流 + 四阶段时间线闭环推演
5.1 第一阶段:跨域目标提示阶段(0s~1.8s,总时长 1800ms)
5.1.1 阶段核心任务
5.1.2 三级协同数据流流向与层级权责拆解
5.1.3 时延拆解、工程误差约束与场景适配边界
5.2 第二阶段:全域武器动态分配阶段(1.8s~3.2s,总时长 1400ms)
5.2.1 阶段核心任务
5.2.2 三级协同数据流流向与指令权限划分
5.2.3 五大实战场景差异化分配逻辑、工程约束
5.3 第三阶段:导弹飞行中段异构传感器相互补盲阶段(3.2s~6.0s,总时长 2800ms)
5.3.1 阶段核心任务
5.3.2 双向补盲数据流逻辑、三级协同联动细节
5.3.3 阶段核心价值、固有误差与优化余量说明
5.4 第四阶段:制导末段双模兜底切换阶段(6.0s~7.6s,总时长 1600ms)
5.4.1 阶段核心任务与量化切换触发阈值体系
5.4.2 兜底切换全域数据流、层级权限解绑逻辑
5.4.3 五大实战场景标准化切换规则固化(工程可直接烧录)
六、五大核心协同执行机制原理、流程、场景适配、工程参数专项研究
6.1 机制一:编队战机 / 导弹交替发射协同机制
6.1.1 底层工作原理
6.1.2 标准化执行流程
6.1.3 最优适配实战场景与效能
6.2 机制二:跨平台交叉目标提示协同机制
6.2.1 信息交互核心逻辑
6.2.2 层级权责划分
6.3 机制三:抗干扰数据链中继协同机制
6.3.1 技术原理与链路架构
6.3.2 全流程中继执行时序与三级协同权责划分
6.3.3 适配作战场景、量化效能增益与工程约束
6.4 机制四:发射后目标提示动态更新协同机制
6.4.1 机制核心定义与底层运行原理
6.4.2 分层执行流程与数据流耦合逻辑
6.4.3 场景适配、作战增益与边界限制
6.5 机制五:雷达烧穿后红外无缝接力协同机制(全文核心专项机制)
6.5.1 核心触发阈值与工况判定逻辑
6.5.2 跨层级无缝接力协同完整流程
6.5.3 三级协同分工 + 五大场景适配 + 效能结论
6.5.4 机制现存缺陷与迭代优化方案
七、协同作战全域效能综合评估、现存瓶颈与工程优化方案
7.1 全域效能评估指标体系与试验对照组设置
7.1.1 量化评估核心指标体系
7.1.2 三组对照试验分组
7.2 对照试验效能量化结果分析
7.2.1 基础探测与态势效能对比
7.2.2 制导打击与对抗效能对比
7.2.3 时间链路时效效能对比
7.3 当前三级协同体系四大核心现存科研与工程瓶颈
7.4 分层针对性工程落地优化方案
7.4.1 体系级链路优化:标准化接口 + 动态路由重构
7.4.2 载机融合级优化:自适应权重融合 + 气象补偿算法
7.4.3 武器级弹载双模优化:阈值自适应 + AI 诱饵甄别
7.4.4 战法机制优化:场景驱动自适应协同调度
八、研究结论、科研不足与未来研究展望
8.1 全文核心研究结论汇总
8.2 本次研究客观科研局限性与不足
8.3 未来中长期科研展望(装备 + 算法 + 战法 + 对抗四维耦合)
8.3.1 算法层面:自适应强化学习协同算法迭代优化
8.3.2 装备层面:多模导引 + 新一代隐身数据链硬件预研
8.3.3 战法层面:有人 - 无人异构编队协同战法体系重构
8.3.4 对抗层面:攻防双向博弈体系闭环补充研究
8.3.5 试验层面:实装试飞对标与工程落地核验规划
参考文献
空战多域传感器 - 武器三级协同 MATLAB 全流程仿真代码
代码说明
- 整体架构:贴合报告中体系级、载机融合级、弹载双模武器级三级协同架构,覆盖五大实战场景、雷达 / 红外互补机理、四阶段标准数据流、五大协同执行机制全维度仿真。
- 仿真模块划分:参数初始化模块、体系级协同模块、载机雷达 / IRST 融合模块、弹载双模导引模块、五大作战场景推演模块、数据流时序仿真模块、五大协同机制模块、效能评估模块、结果可视化模块。
- 运行环境:MATLAB R2020b 及以上版本,无需额外工具箱(仅使用基础函数、绘图、矩阵运算)。
- 代码规模:模块化拆分、注释完整,可直接运行,输出仿真数据、曲线、报表、效能对比结果。
- 仿真工况:复刻报告标定参数:时延、测角误差、烧穿阈值、切换门限、干扰强度、RCS、红外辐射衰减、数据链丢包率等工程参数。
所有资料及代码已经上传知识星球,加入知识星球获取。导弹技术专题还有很多好资料将陆续 上传:
近期上传上传知识星球的专题有:
【俄乌战争专题】俄罗斯进攻战役评估-3万字的原文及机器翻译-今年4月和8月的评估报告;
【空空导弹专题】探索空对空导弹的世界:综合指南-涉及13份技术资料超5万字干货;
【朝鲜导弹专题】朝鲜的导弹试验情况-涉及90份资料-超过150万字的干货;
【美国海岸警卫队专题】美国海岸警卫队组织框架-涉及18份技术文件-超30万字
【导弹技术专题】三叉戟 II D-5 (UGM-133A)系统技术介绍-含34份技术资料-超20万字
【高端战争专题】高端战争的作战理论及战术介绍-涉及30份技术文档-含69万字干货
【好书籍专题】美国国防系统的作战优势-共450页,超过5万字的干货
【伊朗导弹专题】伊朗法塔赫Fattah系列高超音速巡航导弹技术研究-含17份文档-超过3万字技术资料
【无人机作战专题】无人机集群作战技术-共计80余份技术资料(超过100万字)
【专题】未来战争的形态介绍-共700余页-共15万字以上的技术资料
【专题】美国空军指令、海军条令、联合作战条令、条例文档简介【资料超过5000页】共计74份文件
【专题】精确打击-未来的精确制导弹药-含15份技术资料-超10万字
【兵棋推演专题】兵棋推演手册【51份兵棋推演的好资料,搜罗全网好资料】-超80万字
【专题报告】米切尔航空航天研究所 专题技术报告-含10份-超20万字报告
【核武专题】加速走向不稳定?高超音速武器和核使用的风险-涉及核武系统技术报告53份-超100万字干货
【多域作战专题】多域作战专题技术报告-多域集成:揭开神秘面纱-含101份技术报告-超200万字技术报告
【马赛克战争专题】马赛克战争技术研究报告-含42分技术报告-超100万字技术干货
【电子战专题】电子战技术专题报告-含42份技术报告-超130万字干货
【认知战专题】认知战系列技术介绍-含40份资料-超80万字干货
【顶级大学-约翰霍布金斯大学导弹文章】彻底改变打击和空战的艺术 -绝好资料推荐含17份技术报告-50万字干货
【资料合集】最新美国海军技术报告-53份技术报告-超100万字
【高超音速导弹专题】高超音速导弹武器技术专题技术报告-包括138份关于高超音速导弹武器系统最近几年最新的技术报告,包括机器翻译的技术资料-超过500万字绝对干货
相关资料文档资料已经上传知识星球:
该星球用于分享技术、情报和军事类的技术知识,目前该知识星球已有5000份文档了和各类技术分享,后续每天都会有不同的技术资料分享,如果有需要的可以扫知识星球的码加入,内容很丰富,包含雷达技术文档、智能仿真代码,包括无人机蜂群代码等,及其他雷达技术仿真代码、武器系统技术、技术情报、武器分系统技术等知识.