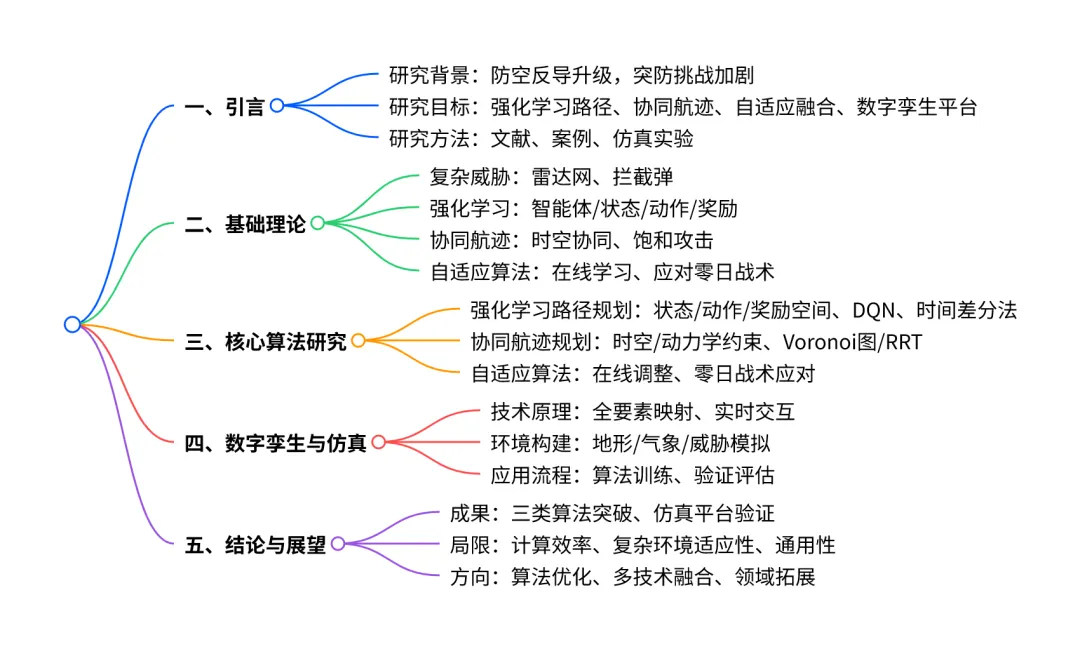
本报告围绕复杂威胁环境下导弹最优突防策略,系统研究智能路径规划、协同航迹规划、自适应算法三大核心技术,融合强化学习(DQN、时间差分法) 与数字孪生仿真平台,解决导弹突防中的雷达网与拦截弹威胁、多弹协同、未知战术适应等难题,显著提升生存概率、攻击成功率与饱和攻击能力,为现代导弹作战效能提升提供理论与技术支撑。
| | |
|---|
| 雷达网 | | 中东部雷达站间距150-200km;ARSR-4 雷达探测470km内目标 |
| 拦截弹 | | PAC-3 MSE 最大拦截距40km、射高23km;HHQ9C 性能与之相当 |
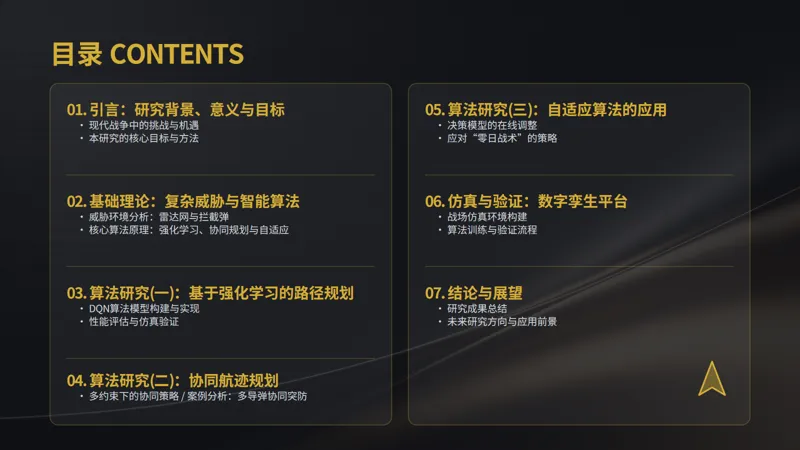
一、引言
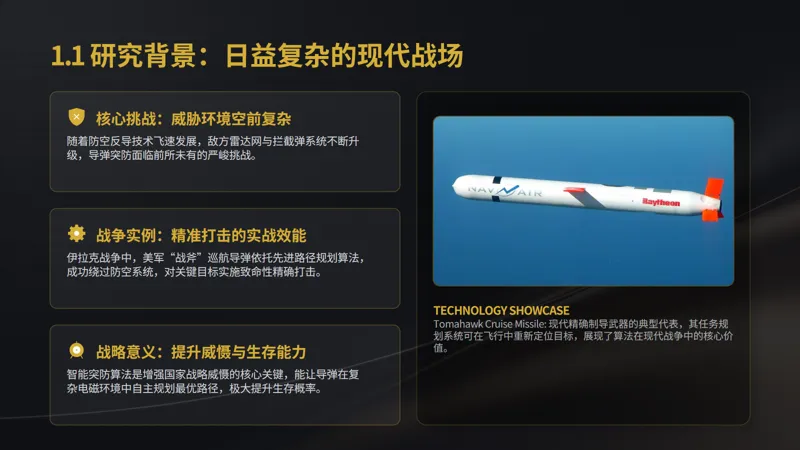
1.1 研究背景与意义
在现代战争中,导弹作为一种重要的进攻性武器,其作战效能直接影响着战争的胜负。随着防空反导技术的飞速发展,导弹面临的威胁环境日益复杂,敌方的雷达网、拦截弹等防御系统不断升级,给导弹的突防带来了巨大挑战。在这样的背景下,智能路径规划与突防算法的研究变得至关重要。
智能路径规划与突防算法能够让导弹在复杂的战场环境中自主规划最优路径,避开敌方的防御系统,提高突防成功率,从而有效地提升导弹的作战效能。以美国在伊拉克战争中的军事行动为例,当时美国使用的巡航导弹通过先进的路径规划算法,成功绕过了伊拉克的防空系统,对关键目标实施了精确打击,极大地影响了战争局势。这种算法不仅能够提高导弹的生存概率,还能增加攻击的突然性和有效性,使敌方难以防御。
此外,智能路径规划与突防算法对于提升国家的战略威慑能力也具有重要意义。在当今国际形势下,拥有先进的导弹突防技术是维护国家安全和战略利益的重要保障。通过不断优化路径规划与突防算法,导弹能够在面对各种复杂威胁时保持强大的作战能力,从而对潜在敌人形成有效的威慑。
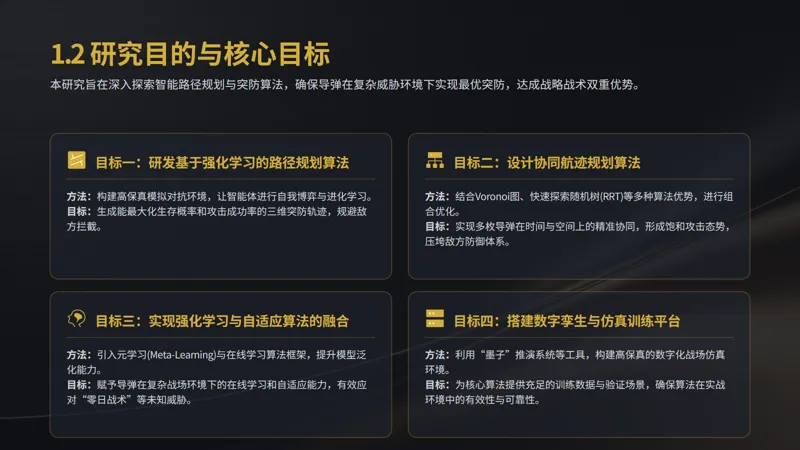
1.2 研究目的与目标
本研究旨在深入探索智能路径规划与突防算法,确保导弹在复杂威胁环境下以最优路径突防。具体目标如下:
1.研发基于强化学习的路径规划算法:通过构建包含雷达网、拦截弹等的模拟对抗环境,让导弹进行自我学习,生成能最大化生存概率和攻击成功率的三维突防轨迹。使导弹在不同的威胁场景下,都能根据环境信息自主规划出最优的飞行路径,有效避开敌方防御系统的探测和拦截。
2.设计协同航迹规划算法:为多枚导弹规划时间协同、空间协同的航迹,实现多枚导弹同时从不同方向抵达目标,饱和敌方防御系统,提高整体攻击效果。结合 Voronoi 图、快速探索随机树等几何与随机搜索方法,解决多导弹协同作战中的路径冲突和时间同步问题,实现高效的协同攻击。
3.实现强化学习与自适应算法的融合:赋予导弹在任务中在线学习和适应未知情况的能力,通过元学习 / 在线学习算法,使导弹的决策模型能根据实时反馈进行微调与适应,应对训练中未遇到的 “零日战术”。让导弹在实际作战中能够根据战场态势的变化,及时调整飞行路径和攻击策略,保持作战的灵活性和有效性。
4.搭建数字孪生与仿真训练平台:利用超大规模、高保真的战场仿真环境,如“墨子” 联合作战推演系统,对上述高级算法进行训练和测试,积累足够数据并验证算法有效性。为算法的优化和改进提供可靠的数据支持,确保算法在实际应用中的性能和可靠性。
1.3 研究方法与数据来源
本研究综合采用多种研究方法,以确保研究的全面性和深入性。
1.文献研究法:通过广泛查阅国内外相关领域的学术文献、研究报告、专利等资料,了解智能路径规划与突防算法的研究现状、发展趋势以及现有技术的优缺点,为研究提供坚实的理论基础。在学术数据库如 Web of Science、中国知网等平台上,以 “智能路径规划”“突防算法”“强化学习”“协同航迹规划” 等为关键词进行检索,筛选出有价值的文献进行深入分析。
2.案例分析法:收集和分析国内外导弹突防的实际案例,包括成功案例和失败案例,总结经验教训,从中获取启示,为算法的设计和优化提供实际参考。例如,分析美国战斧巡航导弹在多次军事行动中的突防情况,研究其路径规划策略和应对敌方防御系统的方法。
3.仿真实验法:利用专业的仿真软件和工具,搭建模拟的导弹飞行环境和对抗场景,对设计的算法进行仿真实验。通过设置不同的威胁条件和参数,模拟导弹在复杂环境下的飞行过程,评估算法的性能指标,如突防成功率、生存概率、飞行时间等。使用 MATLAB、Simulink 等软件进行算法的实现和仿真实验,通过多次实验和数据分析,验证算法的有效性和优越性。
在数据来源方面,主要包括以下几个途径:
1.公开的学术文献和研究报告:获取相关领域的研究成果和实验数据,用于算法的比较和验证。
2.军事数据库和情报资料:在符合保密规定的前提下,收集导弹性能参数、敌方防御系统信息等数据,为仿真实验提供真实的战场环境数据。
3.自主搭建的仿真实验平台:通过仿真实验生成大量的实验数据,用于算法的训练和优化。在仿真实验中,记录导弹在不同场景下的飞行轨迹、遭遇的威胁情况以及算法的决策结果等数据,为后续的分析和改进提供依据。
二、智能路径规划与突防算法基础理论
2.1 导弹突防面临的复杂威胁环境分析
在现代战争中,导弹突防面临着极其复杂的威胁环境,其中雷达网和拦截弹是两种主要的威胁因素。了解这些威胁的原理和特点,对于研究智能路径规划与突防算法具有重要的基础意义。
2.1.1 雷达网威胁
雷达作为现代防空系统的核心探测设备,利用电磁波探测、定位和识别目标,其基本原理是通过发射电磁波照射目标并接收其回波,从而获得探测目标至电磁波发射点的距离、距离变化率(径向速度)、方位和高度等信息。
雷达网通常由多部不同类型、不同功能的雷达组成,通过合理的布局和组网方式,实现对一定区域的全方位、全空域探测。在探测原理方面,不同类型的雷达具有不同的工作频段和探测方式。例如,预警雷达主要用于远距离探测目标,其工作频段通常较低,如米波雷达,具有较强的反隐身能力,能够探测到远距离的空中目标,但精度相对较低;而火控雷达则用于精确跟踪目标,为防空武器提供目标的精确坐标信息,其工作频段较高,如毫米波雷达,精度高,但作用距离相对较短。多部雷达协同工作,可有效弥补单部雷达的探测盲区,提高对目标的探测概率。
雷达网的覆盖范围对导弹突防有着显著影响。以美国在北美建立的防空警戒网为例,北美防空防天司令部控制着 120 个地面远程防空警戒雷达站,昼夜监控高度达 3 万米的北美上空和边境地区空域,这些陆基雷达包括沿美国本土边界展开的 ARSR - 4 固定型雷达,以及 29 部 AN/FPS - 117 三坐标远程防空警戒雷达固定型雷达,自动探测 470 公里以内的空中目标。中国目前天气雷达近地面 1 千米的覆盖范围约 220 万平方公里,中东部地区单点雷达站间距一般在 150 - 200 千米左右,西部地区单点雷达站间距为 250 - 300 千米左右 。雷达网的覆盖范围越大,导弹在飞行过程中被探测到的概率就越高,突防难度也就越大。
雷达的精度也是影响导弹突防的重要因素。高精度的雷达能够更准确地测量目标的位置、速度和姿态等信息,为后续的拦截行动提供更可靠的依据。例如,相控阵雷达能更快、更完整地监测天气系统发展过程,可在 1 分钟内完成一次体扫,其高精度的探测能力使得导弹更难躲避其探测。对于采用低空 / 超低空突防战术的巡航导弹,由于地球曲率、强表面杂波、目标 RCS 起伏、地形遮蔽等因素的影响,地基雷达的探测能力会受到很大限制,但通过雷达组网和数据融合技术,仍能在一定程度上提高对这类目标的探测精度。
2.1.2 拦截弹威胁
拦截弹是用于拦截来袭导弹的防御性武器,是导弹突防面临的另一个重大威胁。拦截弹主要由战斗部、推进系统、制导系统、电源系统和弹体等组成,具有射程远、速度快、精度高、杀伤破坏性大等特点。
根据拦截高度的不同,拦截弹可分为高空拦截弹和低空拦截弹。高空拦截弹一般用于在大气层外拦截来袭的弹道导弹,如美国的 GBI 反导拦截弹,采用三级固体燃料火箭发动机,最大飞行速度约 24 马赫,最远射程为 5000 千米,最大射高为 2500 千米,配备了名为 “大气层外杀伤器”(EKV)的拦截器,由制导系统、推进系统等组成,主要依靠核爆炸释放的 X 射线,穿透来袭弹头的烧蚀层,破坏其防热层,进而烧毁其内部的核装药 ;低空拦截弹则用于在目标上空拦截来袭的弹道导弹,一般是在敌方的弹头进入大气层后,用反弹道导弹的小当量核战斗部摧毁目标。
拦截弹的性能对导弹突防构成了巨大挑战。以美国的“爱国者” 防空导弹系统为例,其 PAC - 3 MSE 型拦截弹能够拦截最大射程 3000 公里的中程弹道导弹,最大拦截距离约 40 公里,最大拦截高度约 23 公里,具备高精度的直接碰撞杀伤能力,采用 “动能 + 破片” 的双战斗部设计,在拦截弹道导弹时采用直接碰撞杀伤,在拦截飞机和巡航导弹这类气动目标时采用近炸模式,使用破片战斗部摧毁目标 。中国首款海基拦截弹 HHQ9C 是一款与爱国者 PAC - 3 MSE 同类型的末端反导导弹,无助推段的性能下限与爱国者 PAC - 3 MSE 相当,即最大射程不小于 40 公里(对弹道导弹)/160 公里(飞机),最大射高不小于 23 公里(对弹道导弹),至少能够拦截最大射程 3000 公里的中程弹道导弹,还具备在大气层内对抗滑翔机动突防高超导弹的能力 。这些高性能的拦截弹使得导弹突防的难度大大增加。
拦截策略也是影响导弹突防的关键因素。在实际作战中,为了提高拦截成功率,通常会采用多种拦截策略。例如,采用“多枚拦截弹拦截一枚来袭导弹” 的策略,像以色列在应对伊朗导弹攻击时,面对伊朗 “新旧导弹混合编组” 的饱和攻击,单枚拦截弹的拦截成功率不足 70%,因此通常会发射 2 - 3 枚拦截弹应对一枚来袭导弹 ;采用分层拦截策略,如以色列构建了涵盖 “铁穹”“大卫投石索”“箭 - 2”“箭 - 3” 四大系统的多层反导防御体系,分别对应短程、中程、远程弹道导弹及高超音速导弹的拦截任务 。这些复杂的拦截策略使得导弹在突防过程中需要面临更多的挑战,增加了突防的难度。
2.2 强化学习基础原理与在路径规划中的应用潜力
在复杂的导弹突防场景中,强化学习作为一种重要的机器学习方法,为智能路径规划提供了新的思路和方法。了解强化学习的基础原理及其在路径规划中的应用潜力,对于研究智能路径规划与突防算法具有重要意义。
2.2.1 强化学习基本概念
强化学习是一种基于环境反馈进行决策的机器学习方法,其核心思想是智能体通过与环境进行交互,根据环境反馈的奖励信号来学习最优的行为策略,以最大化长期累积奖励。
强化学习主要包含以下几个关键要素:
1.智能体(Agent):是能够感知环境并采取行动的实体,在导弹路径规划中,导弹可看作智能体,它根据自身的传感器获取环境信息,并做出飞行路径决策。
2.环境(Environment):是智能体所处的外部世界,对于导弹来说,环境包括雷达网、拦截弹等威胁,以及地形、气象等自然因素。环境会根据智能体的行动产生相应的状态变化,并反馈给智能体。
3.状态(State):描述了环境在某一时刻的特征,是智能体做出决策的依据。在导弹突防场景中,状态可以包括导弹的位置、速度、方向,以及周围雷达的探测范围、拦截弹的位置和运动轨迹等信息。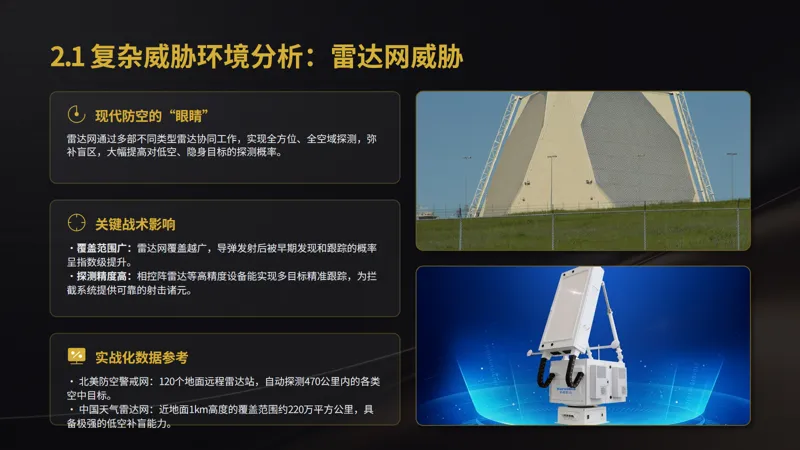
4.行动(Action):是智能体在某一状态下采取的决策,如导弹的飞行方向调整、速度变化等。
5.奖励(Reward):是环境对智能体行动的反馈信号,表示智能体采取某个行动后获得的收益。在导弹突防中,如果导弹成功避开雷达探测和拦截弹攻击,到达目标位置,就会获得正奖励;反之,如果被雷达探测到或被拦截弹击中,就会获得负奖励。
强化学习的学习过程通常如下:智能体在初始状态下,根据一定的策略选择一个行动,执行该行动后,环境状态发生改变,并给予智能体一个奖励。智能体根据这个奖励和新的状态,不断调整自己的策略,以期望在未来获得更多的奖励。通过多次与环境的交互,智能体逐渐学习到最优的行为策略。
2.2.2 强化学习在路径规划中的优势
强化学习在导弹路径规划中具有显著的优势,尤其在处理复杂动态环境和多目标优化方面表现突出。
在复杂动态环境方面,现代战争中的战场环境瞬息万变,雷达网的探测范围和强度可能会随着时间和敌方的干扰而变化,拦截弹的发射时间和轨迹也难以预测。强化学习能够让导弹在这样的复杂动态环境中自主学习和适应。例如,导弹可以通过不断地与模拟的对抗环境进行交互,根据环境反馈的奖励信号,逐渐学习到在不同威胁情况下的最优飞行路径。当遇到新的威胁情况时,导弹能够根据已学习到的策略和当前的环境状态,快速做出决策,调整飞行路径,从而提高突防的成功率。
在多目标优化方面,导弹的路径规划通常需要考虑多个目标,如最大化生存概率、最大化攻击成功率、最小化飞行时间等。传统的路径规划方法往往难以同时兼顾多个目标,而强化学习可以通过设置合理的奖励函数,将多个目标纳入到一个统一的优化框架中。例如,在奖励函数中,可以将生存概率、攻击成功率等作为正奖励因素,将飞行时间等作为负奖励因素,使得智能体在学习过程中自动平衡这些目标,寻找最优的路径策略,以实现多个目标的综合优化。这种多目标优化能力使得导弹在路径规划时能够更加全面地考虑各种因素,提高作战效能。
2.3 协同航迹规划算法的基本原理与作用
在多枚导弹作战的场景中,协同航迹规划算法起着至关重要的作用。它能够实现多枚导弹之间的时间协同和空间协同,有效提高多枚导弹的作战效能,饱和敌方防御系统。了解协同航迹规划算法的基本原理和作用,对于提升导弹作战能力具有重要意义。
2.3.1 协同航迹规划的概念与目标
协同航迹规划是指为多枚导弹规划出相互协调、相互配合的飞行轨迹,以实现特定的作战目标。其核心目标是在考虑多枚导弹之间的空间和时间关系的基础上,使它们能够在合适的时间、从合适的方向抵达目标,从而实现对目标的有效攻击,并最大程度地发挥多枚导弹的整体作战效能。
在空间协同方面,要确保多枚导弹的飞行轨迹不会发生冲突,避免在飞行过程中相互碰撞。同时,要合理安排导弹的飞行路径,使其能够从不同方向对目标形成包围态势,增加敌方防御系统的拦截难度。例如,在对敌方重要目标进行攻击时,多枚导弹可以分别从东、西、南、北四个方向同时飞向目标,使敌方的雷达网和拦截弹难以同时应对多个方向的威胁,从而提高导弹的突防成功率。
在时间协同方面,要精确控制多枚导弹到达目标的时间,实现同时攻击。这样可以在瞬间对敌方防御系统造成巨大的压力,使其来不及做出有效的反应。例如,在对敌方防空系统进行攻击时,多枚导弹同时到达目标区域,敌方的拦截弹可能会因为数量不足而无法对所有导弹进行有效拦截,从而为部分导弹创造突防的机会。
2.3.2 协同航迹规划对多枚导弹作战的重要性
协同航迹规划对多枚导弹作战具有多方面的重要性,能够显著提升多枚导弹的作战效能。
首先,协同航迹规划可以提高导弹的突防成功率。通过空间协同,多枚导弹从不同方向接近目标,使得敌方的雷达网和拦截弹难以全面覆盖和有效拦截。敌方需要分散防御力量来应对多个方向的威胁,从而降低了对单个方向导弹的防御强度,为导弹突防创造了有利条件。通过时间协同,多枚导弹同时到达目标区域,形成饱和攻击,使敌方的拦截弹在数量上难以满足需求,增加了导弹突破防御的概率。
其次,协同航迹规划可以增强导弹攻击的突然性。多枚导弹按照协同规划的轨迹飞行,敌方难以预测导弹的具体攻击方向和时间。当导弹从多个方向同时发起攻击时,敌方往往会陷入混乱,无法及时做出有效的防御决策,从而提高了攻击的突然性和效果。
此外,协同航迹规划还可以优化导弹的作战资源利用。通过合理规划导弹的飞行轨迹和到达时间,可以避免导弹之间的资源浪费,提高作战资源的利用效率。例如,避免多枚导弹在同一区域重复飞行,减少燃料消耗和飞行时间,使导弹能够在有限的资源条件下更好地完成作战任务。
2.4 自适应算法的基本原理与在导弹任务中的适应性需求
在复杂多变的导弹作战环境中,自适应算法能够赋予导弹在线学习和适应未知情况的能力,使导弹的决策模型能够根据实时反馈进行调整和优化。了解自适应算法的基本原理以及导弹任务中对其的适应性需求,对于提升导弹的作战性能具有重要意义。
2.4.1 自适应算法的定义与特点
自适应算法是一种能够根据环境变化自动调整自身参数或策略的算法。其核心特点在于它能够实时感知环境的变化,并根据这些变化对算法的运行进行动态调整,以适应不同的环境条件,实现更好的性能表现。
自适应算法通常具有以下几个特点:
1.自适应性:能够根据环境的实时反馈,自动调整算法的参数、结构或决策策略,以适应环境的变化。在导弹飞行过程中,当遇到敌方雷达的干扰或拦截弹的攻击时,自适应算法可以根据这些威胁的变化,及时调整导弹的飞行路径和速度,以提高生存概率。
2.实时性:能够在短时间内对环境变化做出响应,快速调整算法的行为。导弹作战环境瞬息万变,要求自适应算法能够实时处理传感器获取的信息,并迅速做出决策,确保导弹能够及时应对各种威胁。
3.学习能力:部分自适应算法具有学习能力,能够通过对历史数据和经验的学习,不断优化自身的性能。例如,元学习 / 在线学习算法可以使导弹在任务执行过程中,根据实时反馈不断学习新的知识和策略,提高对未知情况的应对能力。
2.4.2 导弹任务中对自适应算法的需求分析
在导弹执行任务的过程中,面临着各种复杂多变的场景,对自适应算法有着强烈的需求。
首先,在面对敌方防御策略变化时,导弹需要自适应算法来调整飞行路径和攻击策略。现代战争中,敌方的防御系统不断升级,防御策略也越来越复杂多变。例如,敌方可能会根据导弹的飞行轨迹和攻击模式,实时调整雷达的探测策略和拦截弹的发射时机。此时,导弹如果不能及时适应这些变化,就很容易被敌方防御系统拦截。自适应算法可以使导弹根据敌方防御策略的实时变化,在线学习并调整自身的决策模型,规划出新的最优飞行路径和攻击策略,以提高突防成功率。
其次,在遇到训练中未遇到的“零日战术” 时,导弹也需要自适应算法来应对。“零日战术” 是指敌方采用的全新的、未被预先研究和防范的战术。由于这些战术是未知的,传统的导弹算法可能无法有效应对。自适应算法能够让导弹在遇到 “零日战术” 时,根据实时获取的战场信息,快速学习和适应新的威胁,做出合理的决策,从而保持作战的灵活性和有效性。
此外,在不同的战场环境下,如不同的地形、气象条件等,导弹也需要自适应算法来优化飞行性能。不同的地形和气象条件会对导弹的飞行产生不同的影响,例如,山区地形可能会导致雷达信号的遮挡和反射,恶劣的气象条件可能会影响导弹的飞行稳定性和传感器的性能。自适应算法可以根据这些环境因素的变化,自动调整导弹的飞行参数和控制策略,确保导弹在各种复杂环境下都能正常飞行并完成任务。
三、基于强化学习的路径规划算法研究
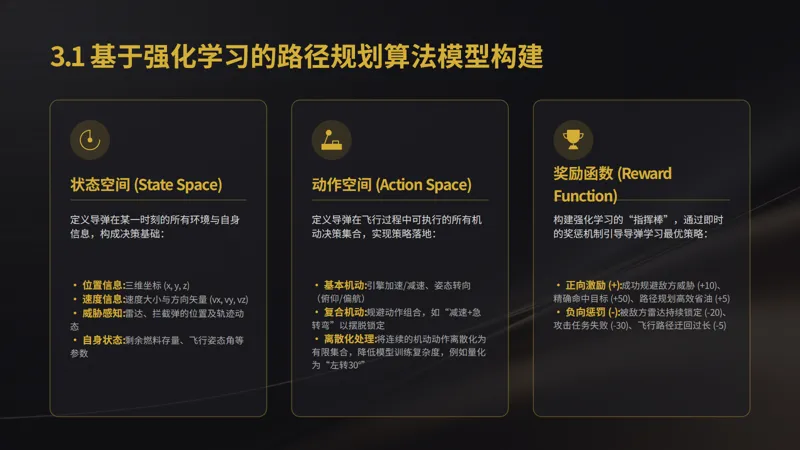
3.1 基于强化学习的路径规划算法模型构建
3.1.1 状态空间定义
3.1.2 动作空间设计
3.1.3 奖励函数构建
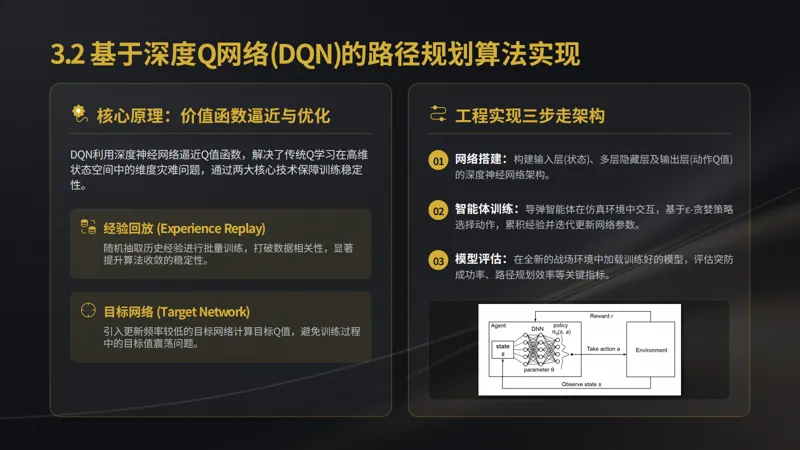
3.2 基于深度 Q 网络(DQN)的路径规划算法实现
3.2.1 DQN 算法原理
3.2.2 DQN 在导弹路径规划中的应用步骤
3.3 时间差分法在路径规划中的应用与优势
3.3.1 时间差分法原理
3.3.2 时间差分法在动态环境路径规划中的优势
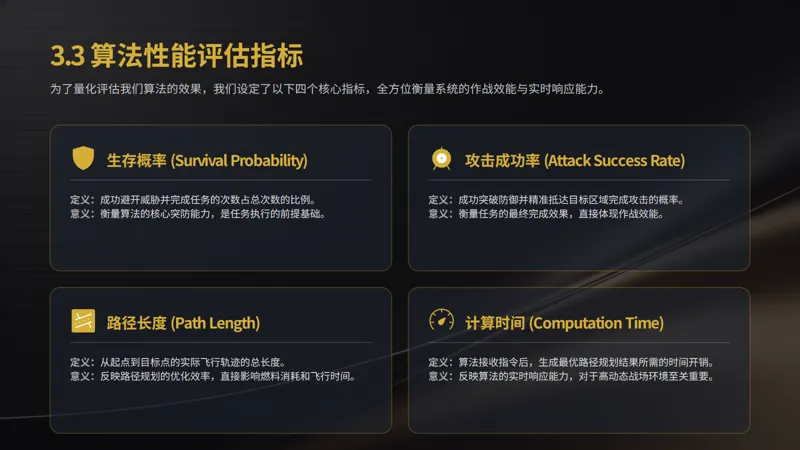
3.4 算法性能评估指标与仿真实验
3.4.1 性能评估指标选取
3.4.2 仿真实验设置与结果分析
四、协同航迹规划算法研究
4.2 协同航迹规划算法的约束条件与处理策略
4.2.1 时间协同约束
4.2.2 空间协同约束
4.2.3 动力学约束
4.3 协同航迹规划算法的仿真验证与案例分析
4.3.1 仿真实验设计与场景设置
4.3.2 案例分析:多枚导弹协同突防任务
五、自适应算法在导弹任务中的应用研究
5.2 自适应算法在导弹决策模型中的应用策略
5.2.2 导弹决策模型的在线调整与适应策略
5.2.3 应对 “零日战术” 的策略与效果分析
六、数字孪生与仿真训练
6.1 数字孪生与仿真训练在算法验证中的重要性
6.1.1 数字孪生技术原理与特点
6.1.2 仿真训练为算法提供数据支持与验证环境
6.2 基于数字孪生的战场仿真环境构建
6.2.1 构建思路与关键技术
6.2.2 环境要素的模拟与实现
6.3 仿真训练在算法优化与验证中的应用流程
6.3.1 算法训练阶段的仿真应用
6.3.2 算法验证阶段的仿真测试与评估
七、研究结论与展望
7.1 研究成果总结
7.2 研究的局限性与未来研究方向
7.3 对导弹作战效能提升的潜在影响与实际应用前景
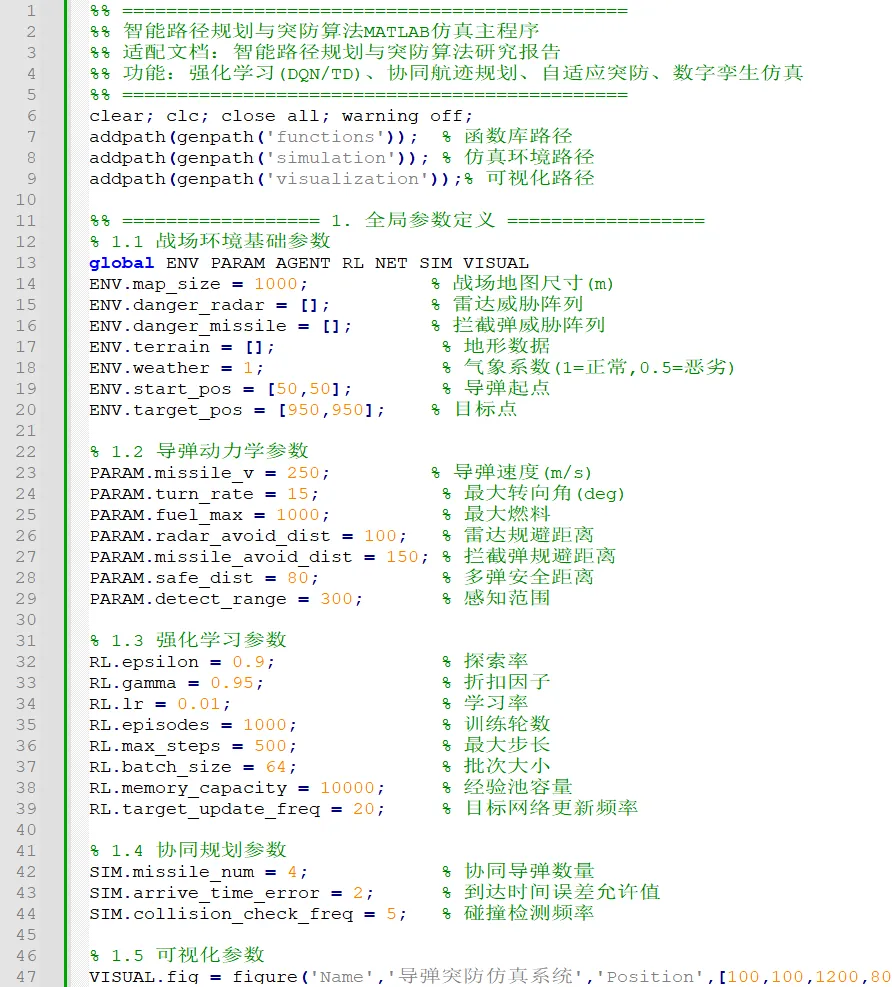
复杂威胁环境下导弹智能突防路径规划 MATLAB 仿真系统
涉及的文档和代码等技术文件如下,已上传知识星球:
近期上传资料如下:
剖析美国海军宙斯盾弹道导弹防御(BMD)计划:演进、效能与挑战-全文3.2万字绝对干货
美国海军DDG(X)下一代驱逐舰项目:背景、挑战与国会关切-全文2.19万字绝对技术干货
算法时代的战争新范式:认知战与人工智能战略的深度融合与演进-全文2.86万字绝对技术干货
基于作战智能体的历史战役多模态动态仿真:历史分析的创新拓展-全文3.31万字绝对干货
M10 Booker步兵突击车:重塑美军陆军现代化作战格局的关键力量-全文3.23万字绝对干货
解析MQ-9“死神”无人机机载雷达:组成、性能与实战应用-全文3.3万字绝对干货
透视美海军新型作战概念:装备支撑与演训实践的深度剖析-全文1.76万字绝对技术干货
破局与革新:国外城市作战武器装备及战法的深度剖析与前瞻-全文2.82万字绝对技术干货
剖析美国空军先进作战管理系统(ABMS):战略、技术与挑战的深度洞察-全文3.76万字绝对技术干货
国外反无人机蜂群装备试验验证与效能评估的深度剖析-全文3.02万字绝对技术干货
美国陆军巡飞弹集群同步作战技术剖析:能力、应用与挑战-全文1.9万字绝对技术干货
多维视角下美军未来空战关键支撑技术规划剖析-全文1.92万字绝对技术干货
俄乌冲突中俄军地面装甲车辆运用效果及启示探究-本文2.59万字绝对技术干货
多维视角下美国新质新域航天装备发展剖析与洞察-本文2.43万字绝对技术干货
多维度剖析美军新质作战力量建设的未来走向与全球影响-全文2.06万字绝对技术干货
生成式人工智能安全威胁剖析与应对策略研究-全文2.36万字绝对技术干货
蜂群智能:源于蜂群理论的智能探索与应用拓展-本文2.46万字绝对技术干货
美军“反杀伤链”行动:技术突破引领现代战争变革-本文2.47万字绝对技术干货
智能侦察无人机案例深度剖析与未来展望-本文2.47万字技术干货
人工智能赋能下人类-智能体编队:大规模战斗的未来变革与展望-全文3.21万字绝对技术干货
【智慧兵棋推演专题】美国在人工智能兵棋推演的使用介绍--21份技术资料,超50万字的干货
提高空中和导弹防御(AMD)系统在人类与人工智能之间的信任-182页论文+145页技术论文
工智能用于防空和导弹防御安全风险评估的技术报告-162页
基于代理的模型对马赛克战争的建模技术介绍-涉及180页资料共计13万字的干货
【人工智能与杀伤链专题】以机器速度做出决策:将 AI 引入命令链-含30份技术资料-共406页-超100万字干货
【反无人机蜂群专题】关于在战斗中对小型无人机蜂群防御和手段-涉及28份资料-超100万字
海军兵棋推演战斗管理辅助工具中的博弈论和规范分析-2022最新84页论文
多域作战中的风险感知-美国陆军55页报告
游荡弹药和不可预测性:武器系统的自主性和对人类控制的挑战-72页
技术报告基于人工智能(AI)的空中和导弹防御(AMD):以结果为导向的辅助决策-145页
在战斗中对小型无人机蜂群防御和手段-涉及28份资料-超100万字
本文节选自原文的一部分内容,原文进入知识星球下载: