一、形位公差
形位公差(几何公差)是为了保证机械产品的使用性能,对零件几何特征的形状和位置偏差所规定的允许变动范围。
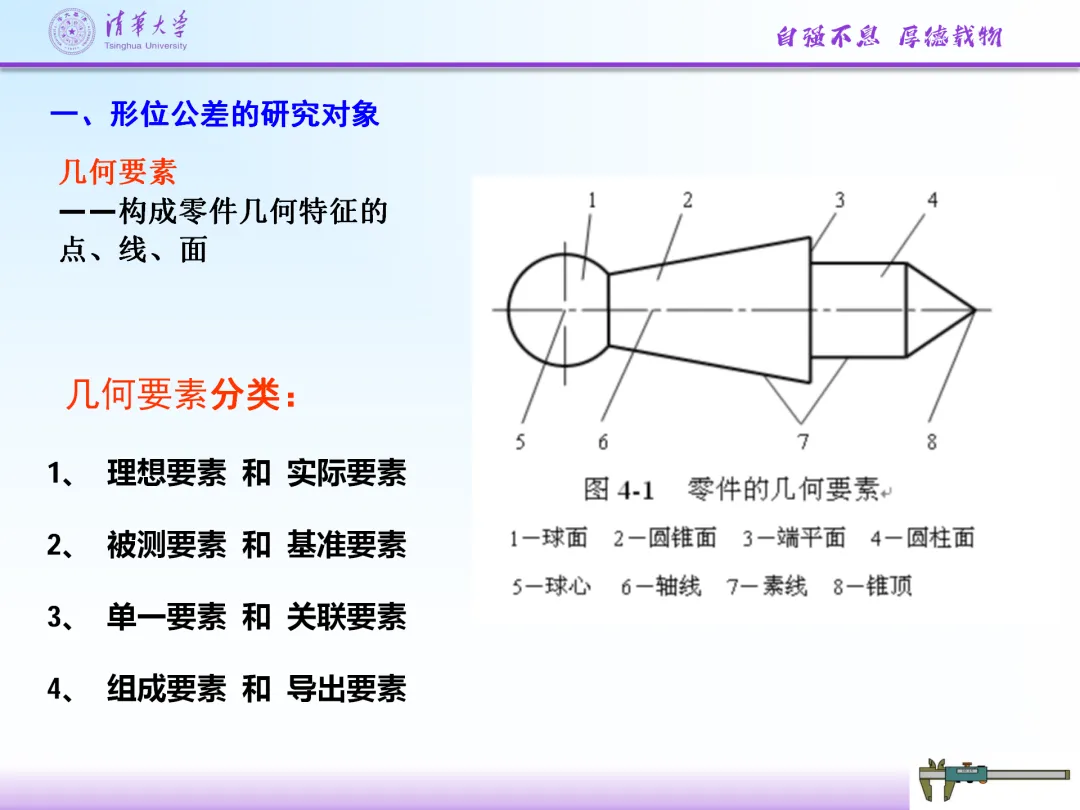
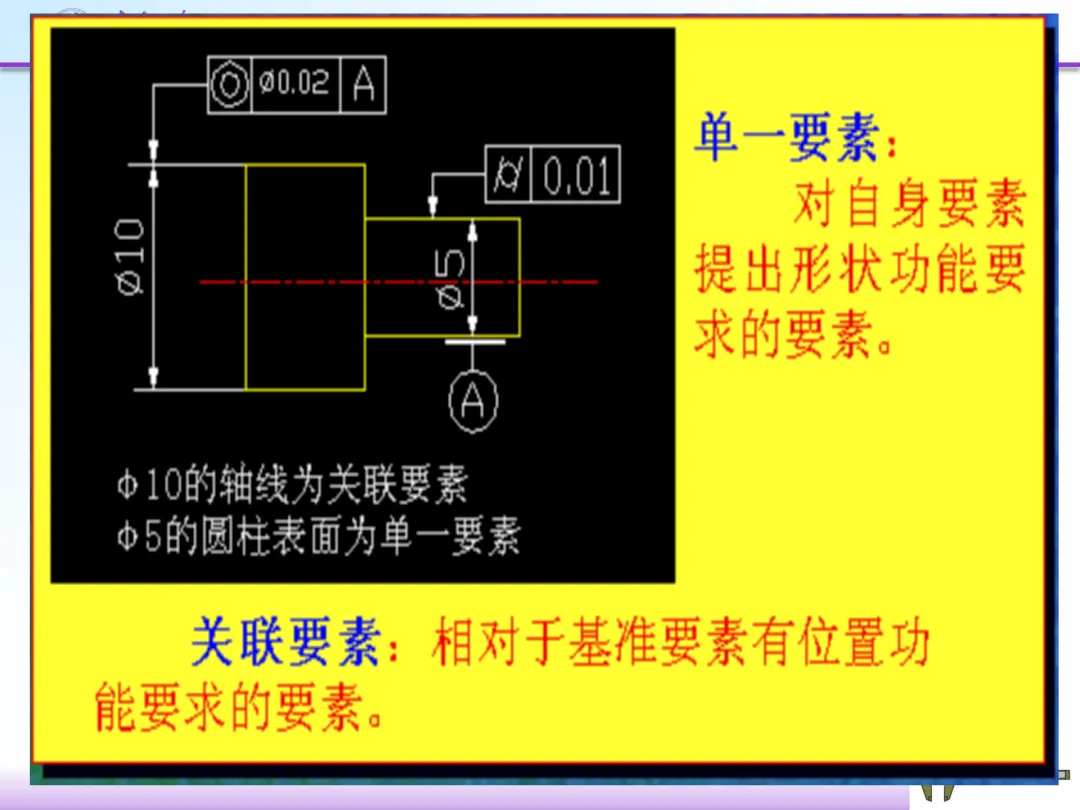
它包括形状公差与位置公差两大类,其中形状公差控制单一要素的形状误差,位置公差控制关联要素的方向和位置误差。
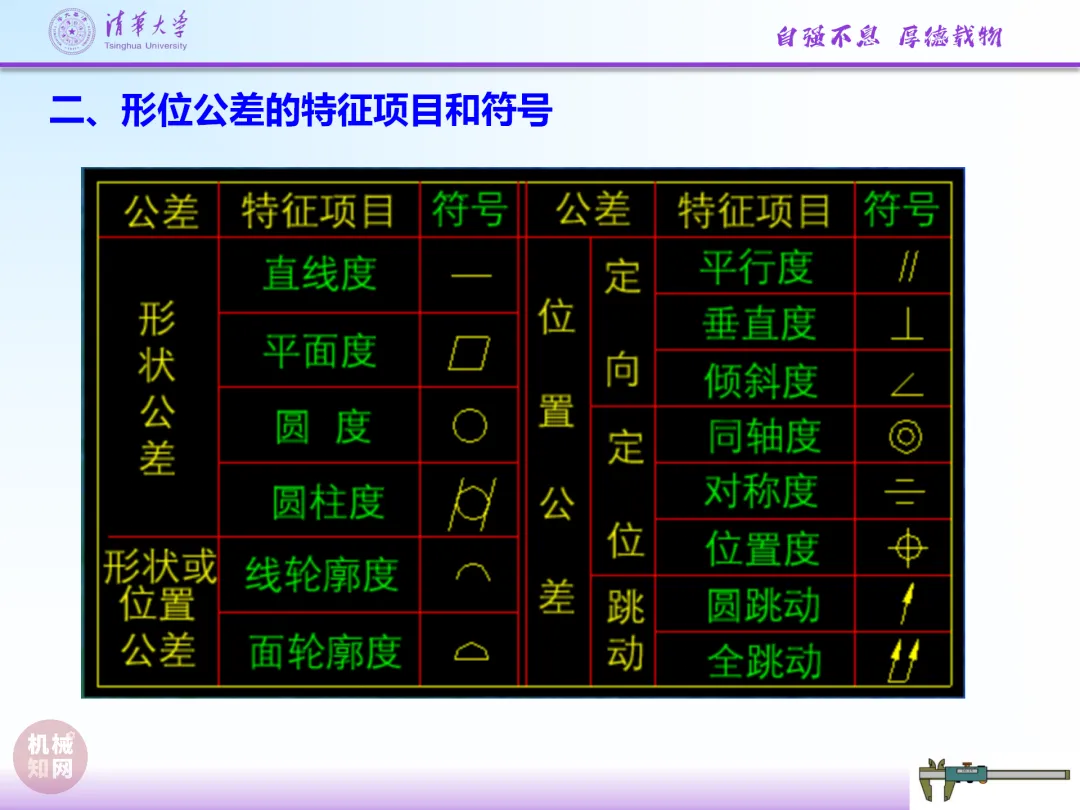
形位公差共14项,包括直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度、平行度、垂直度、倾斜度、同轴度、对称度、位置度、圆跳动和全跳动。
二、形状公差
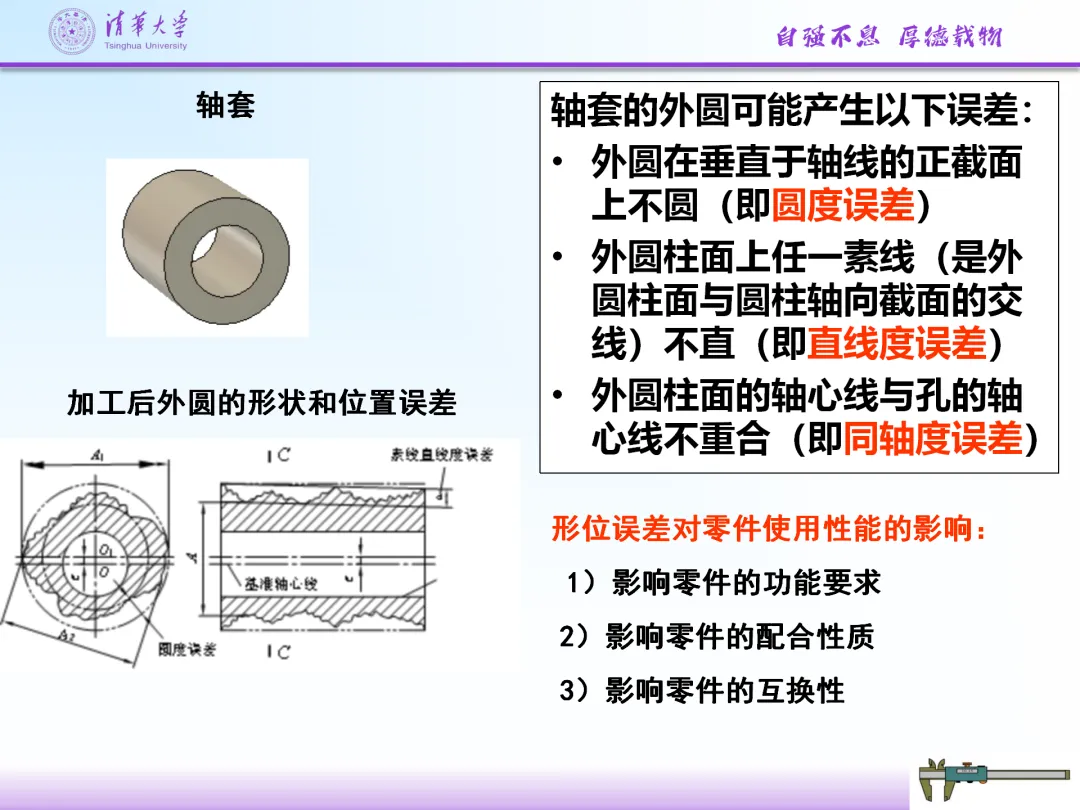
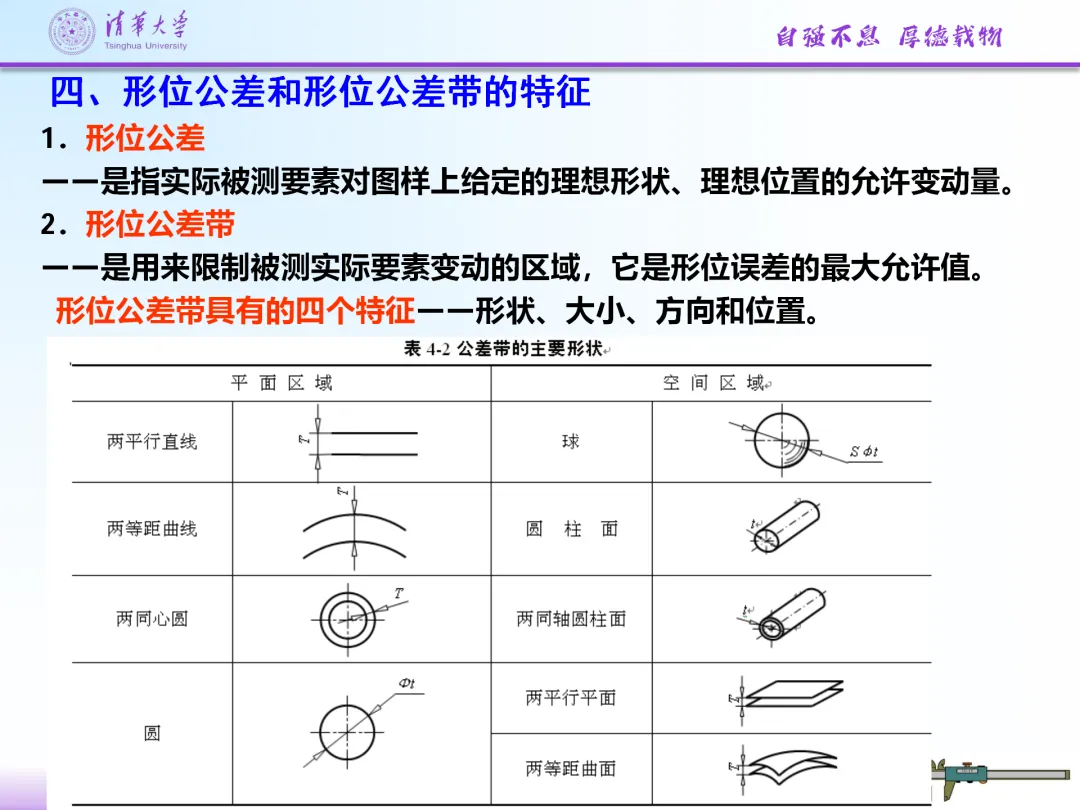
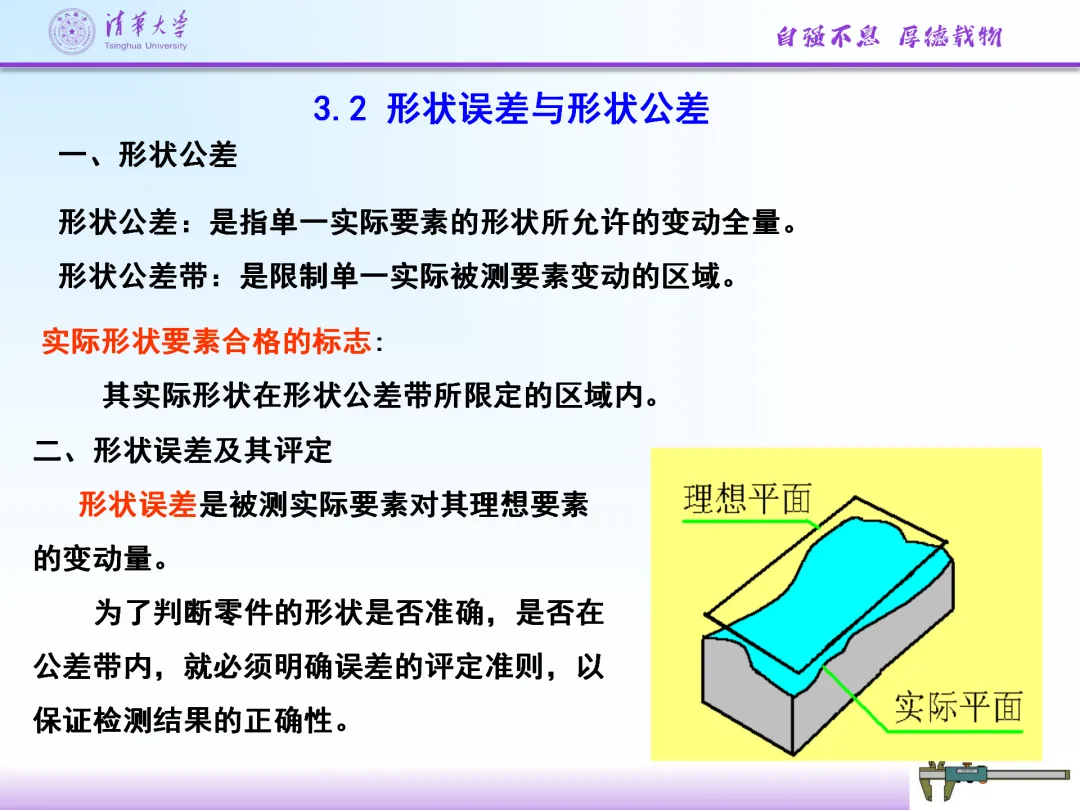
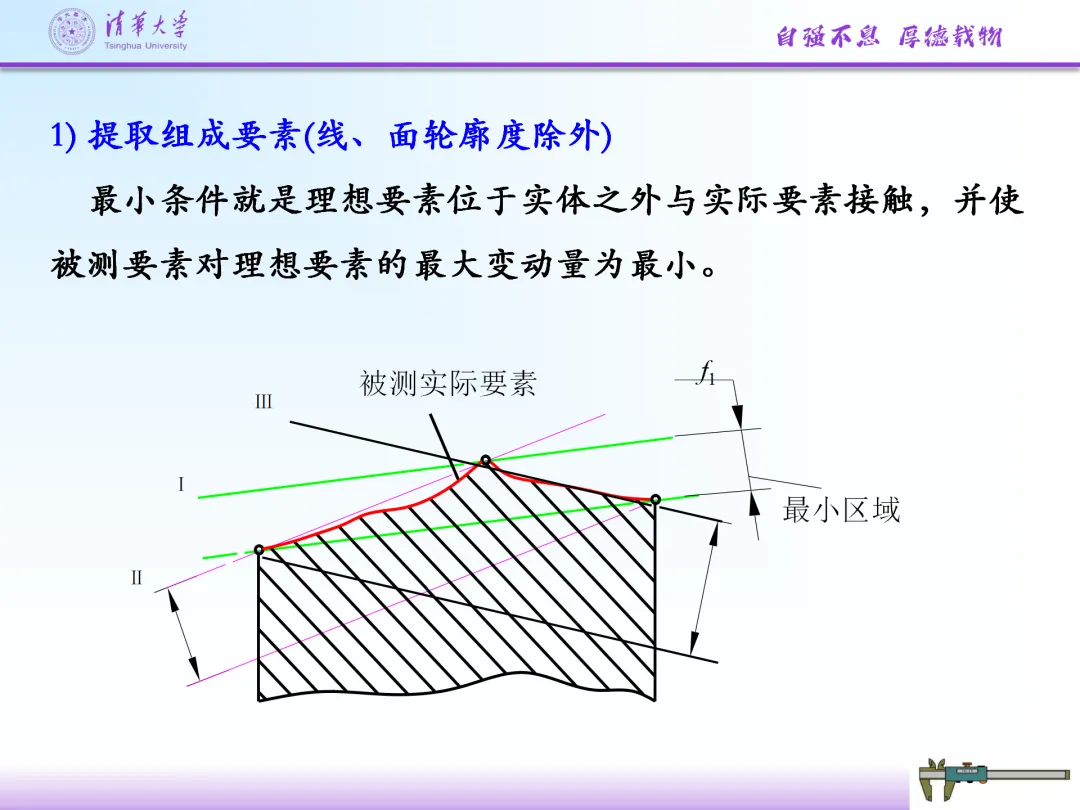
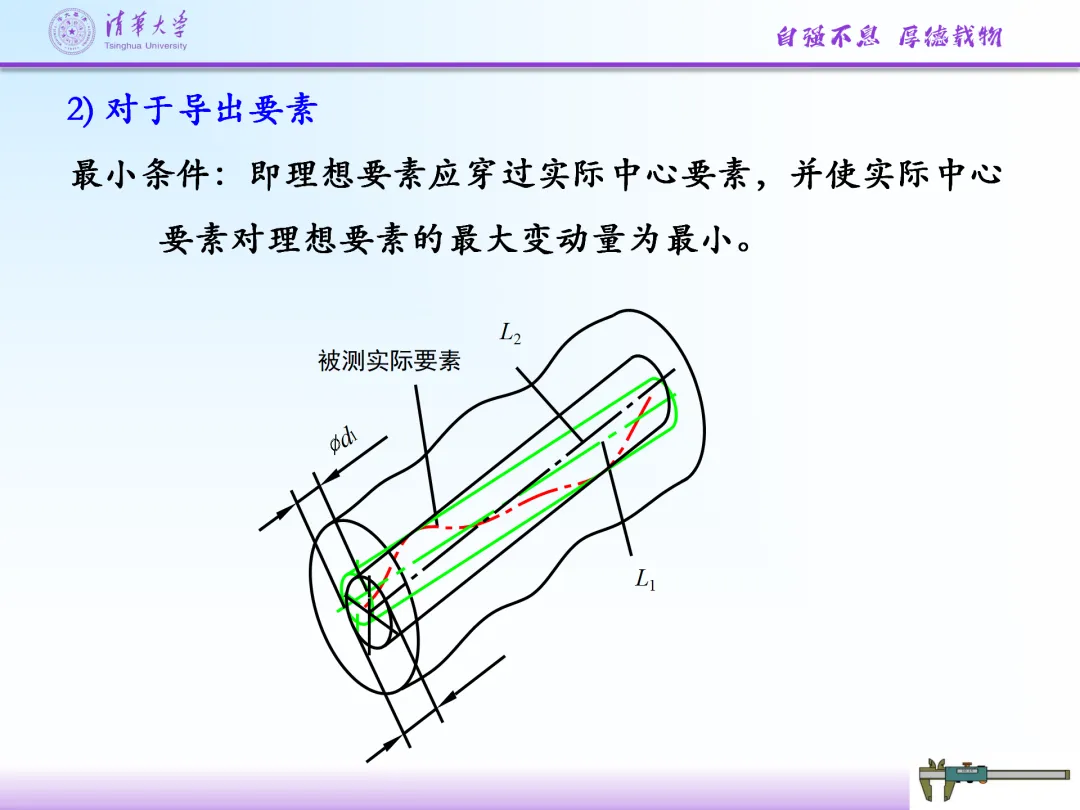
形状公差是指单一实际要素的形状所允许的变动全量,其公差带只有大小和形状,无方向和位置的限制。
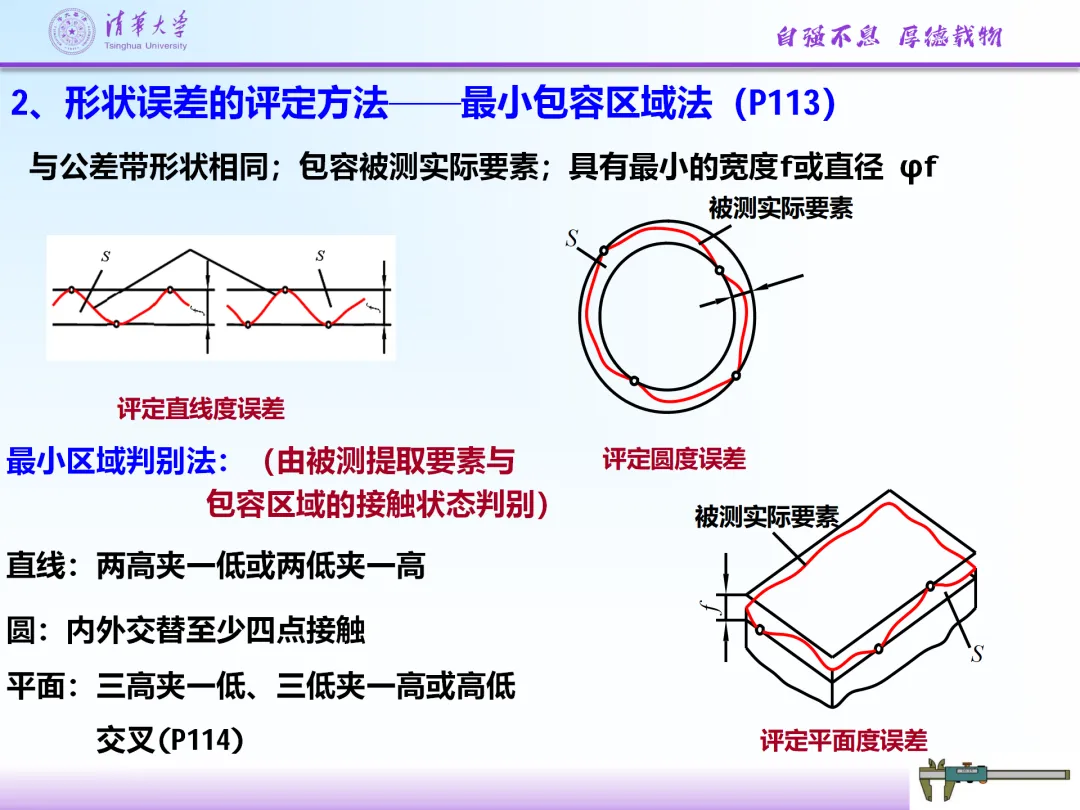
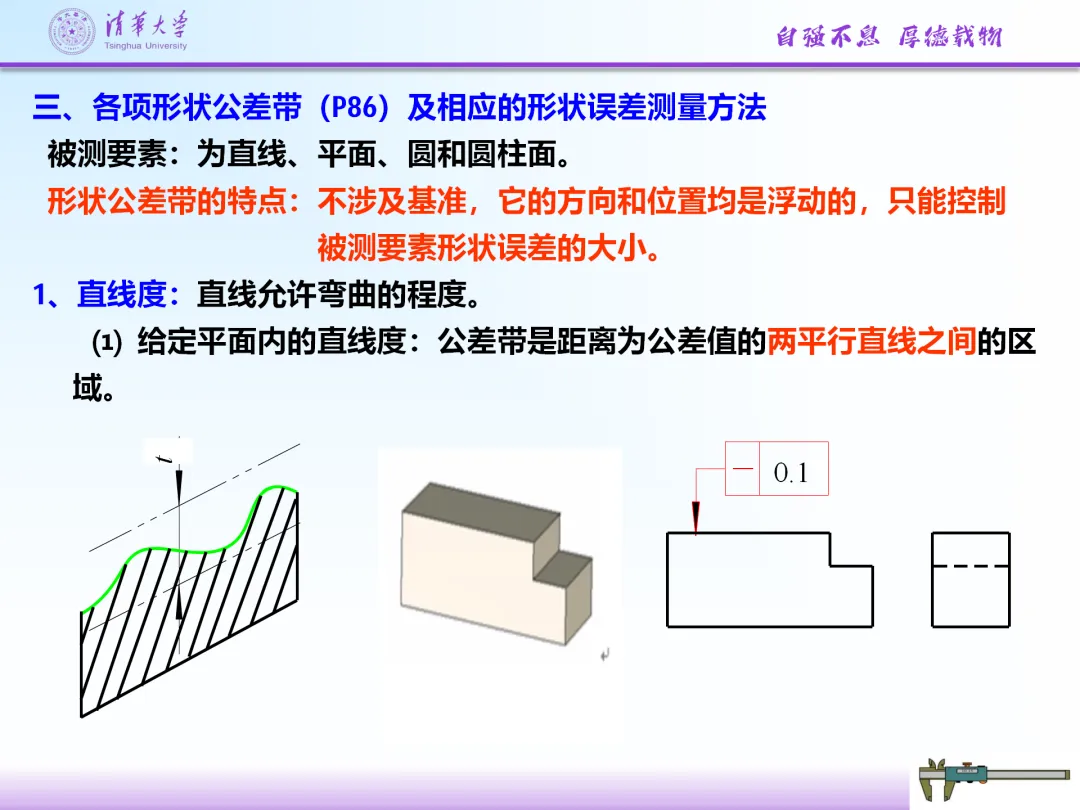
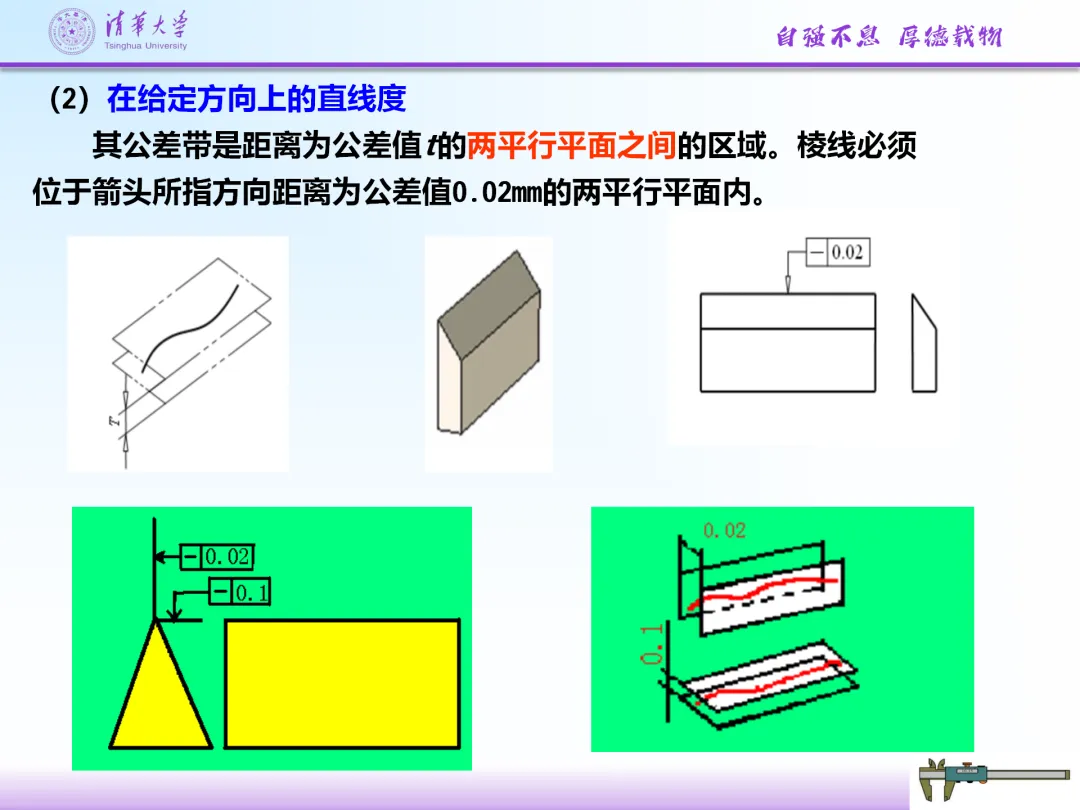
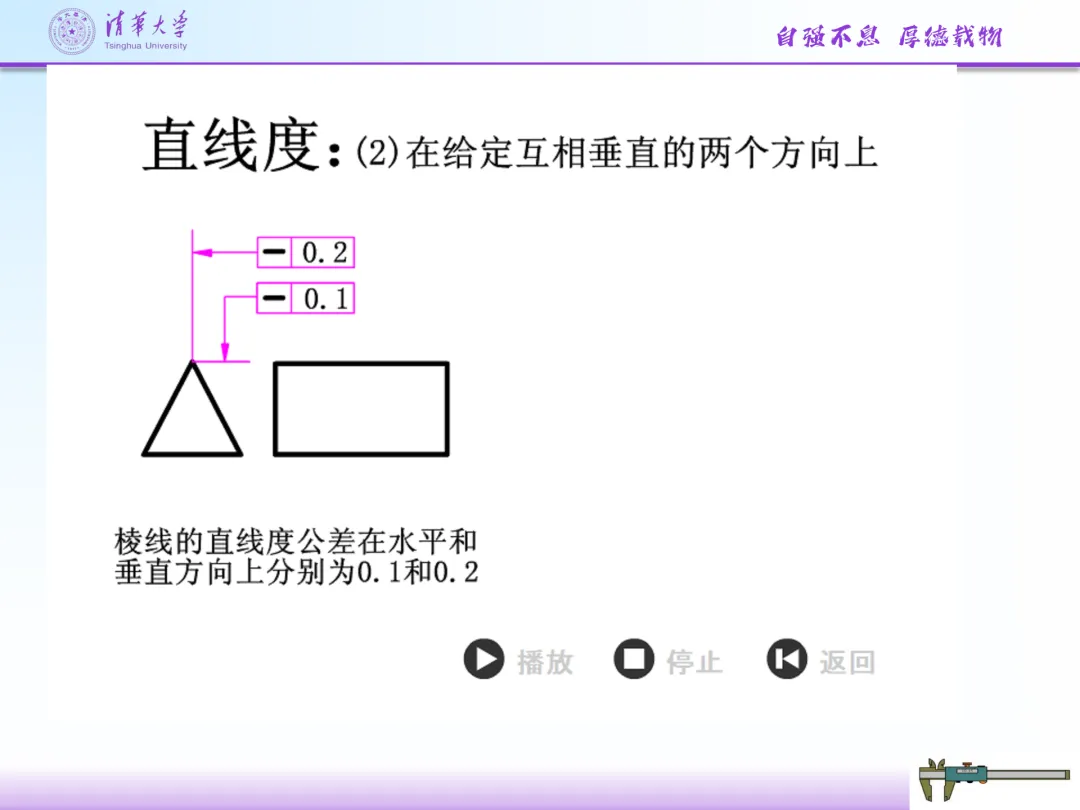
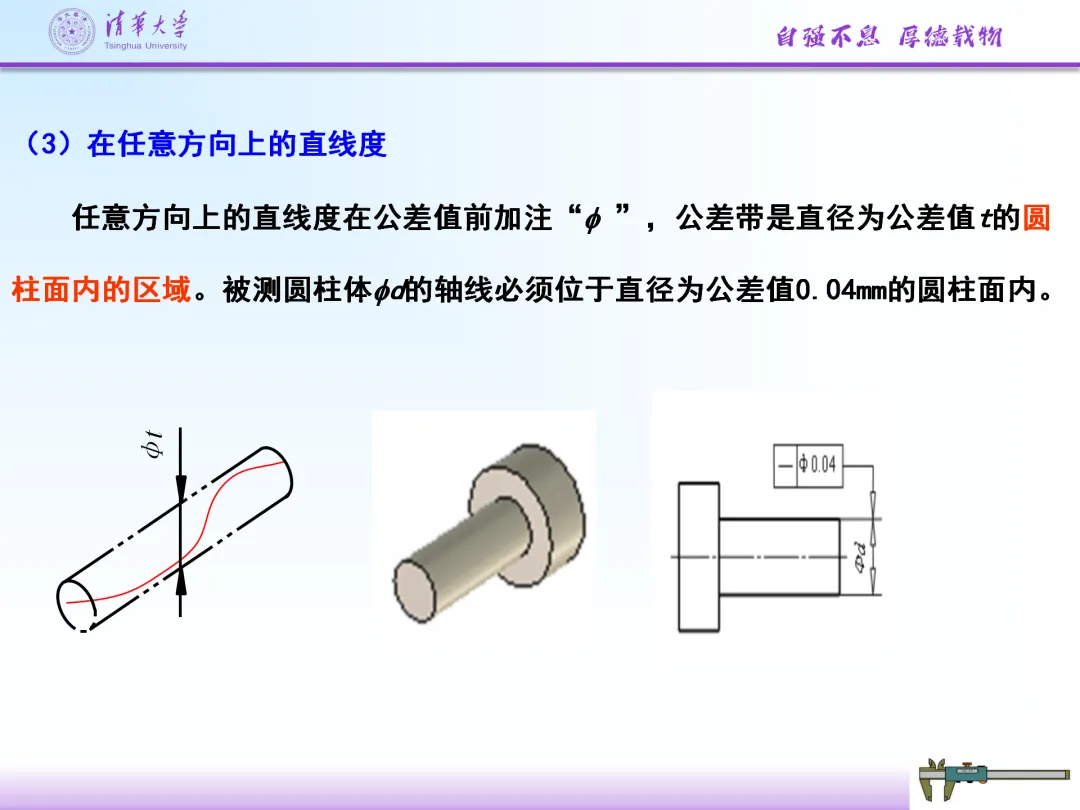
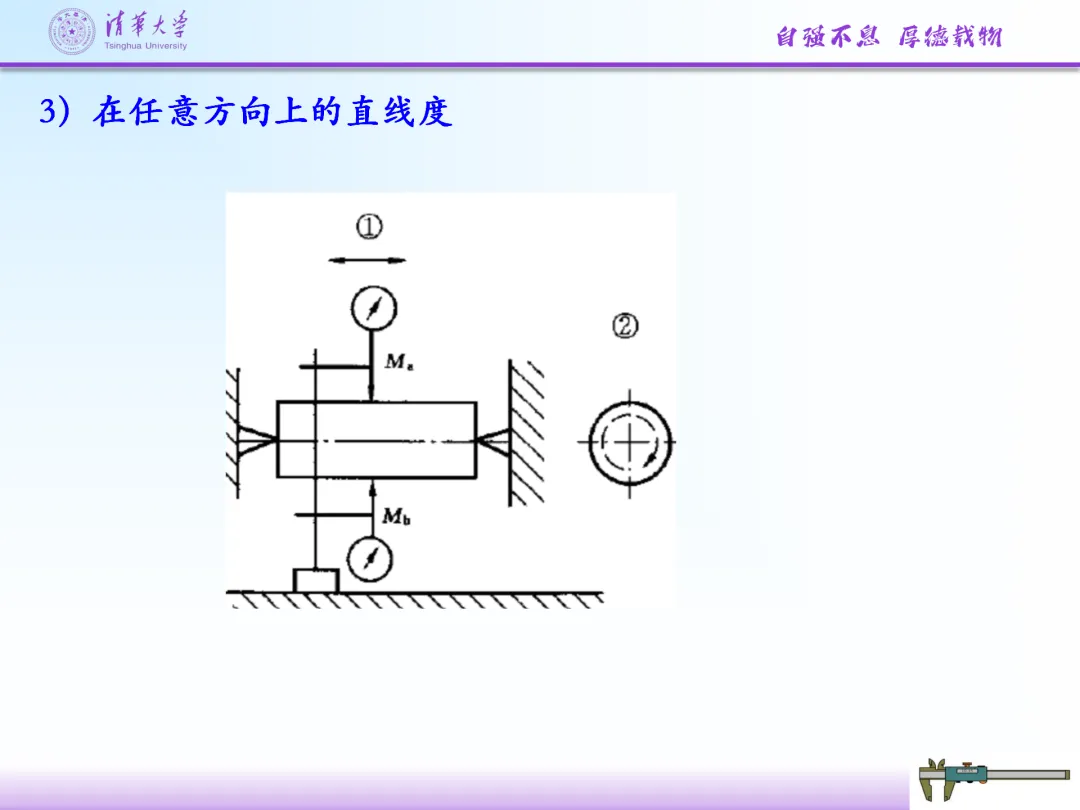
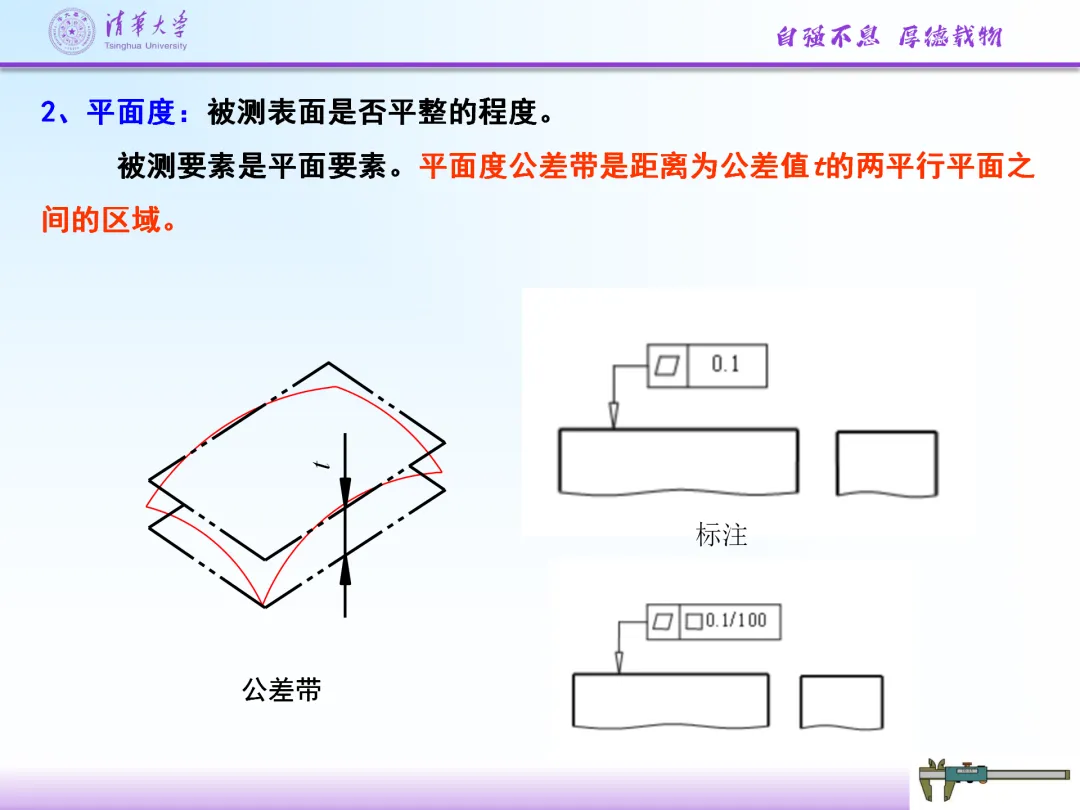
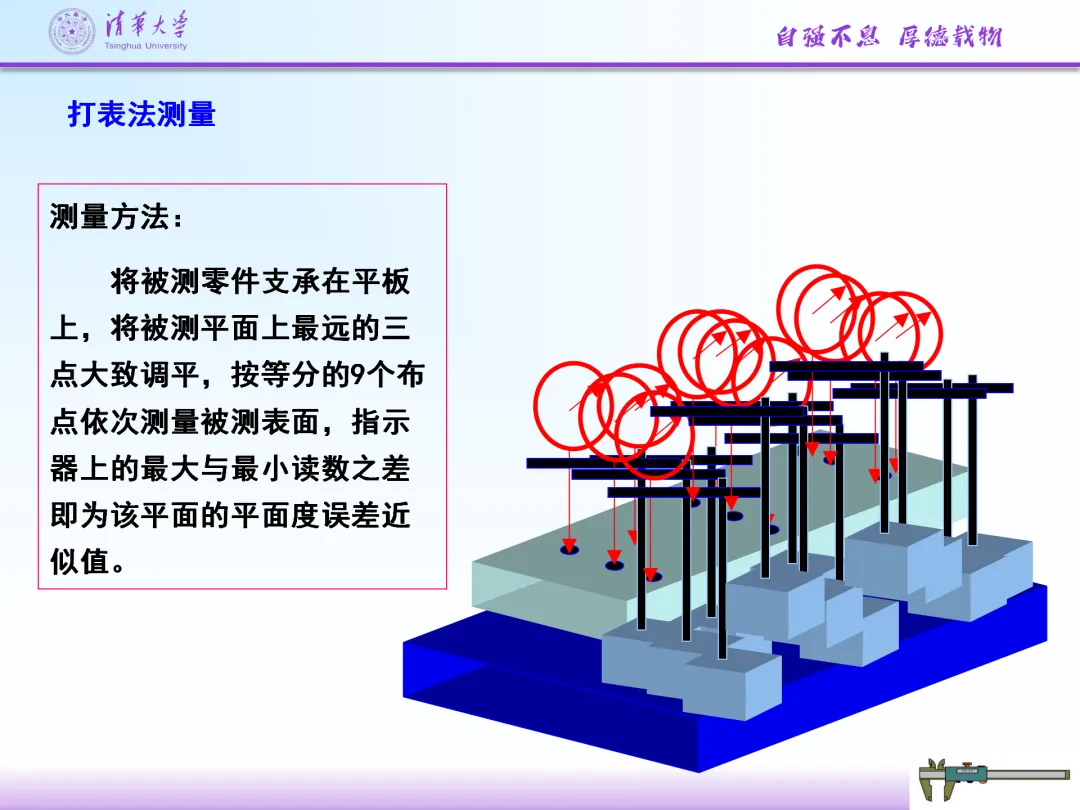
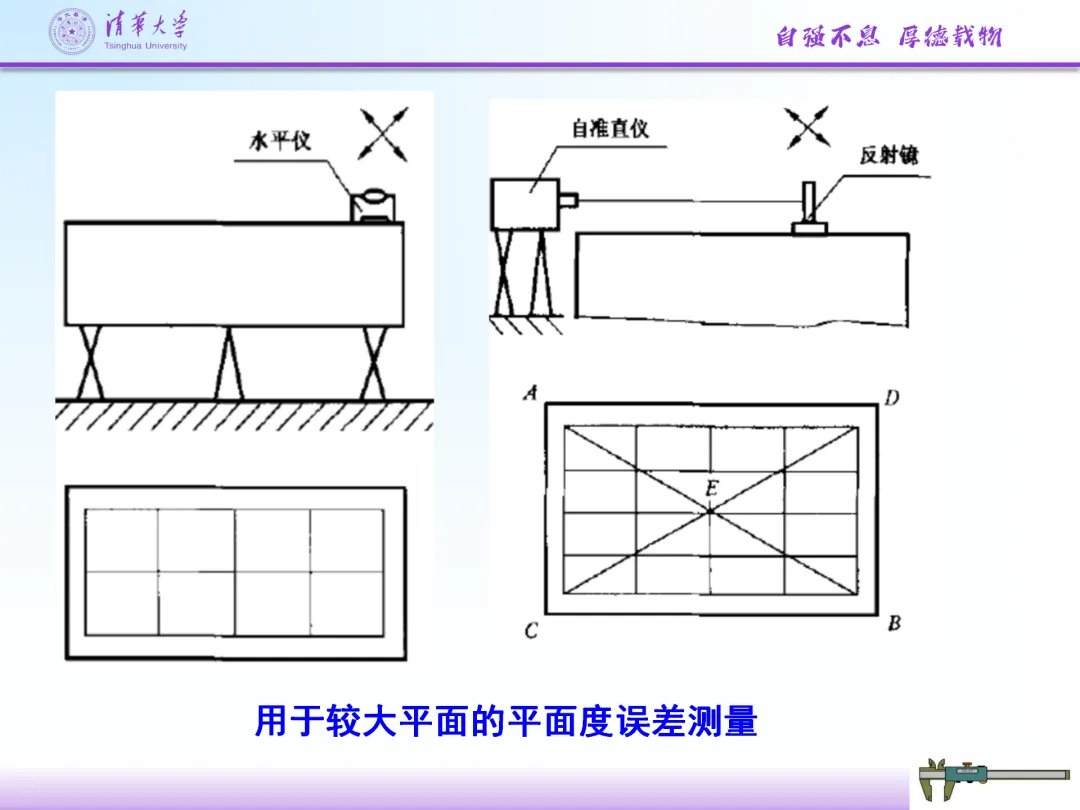
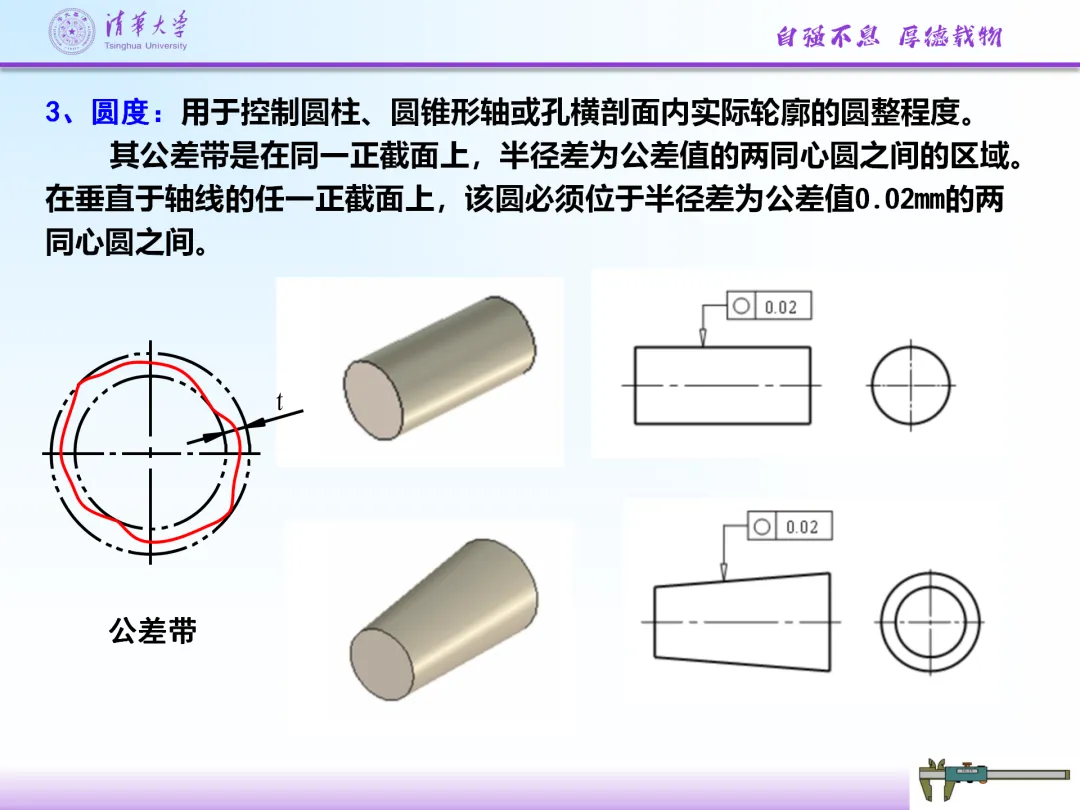
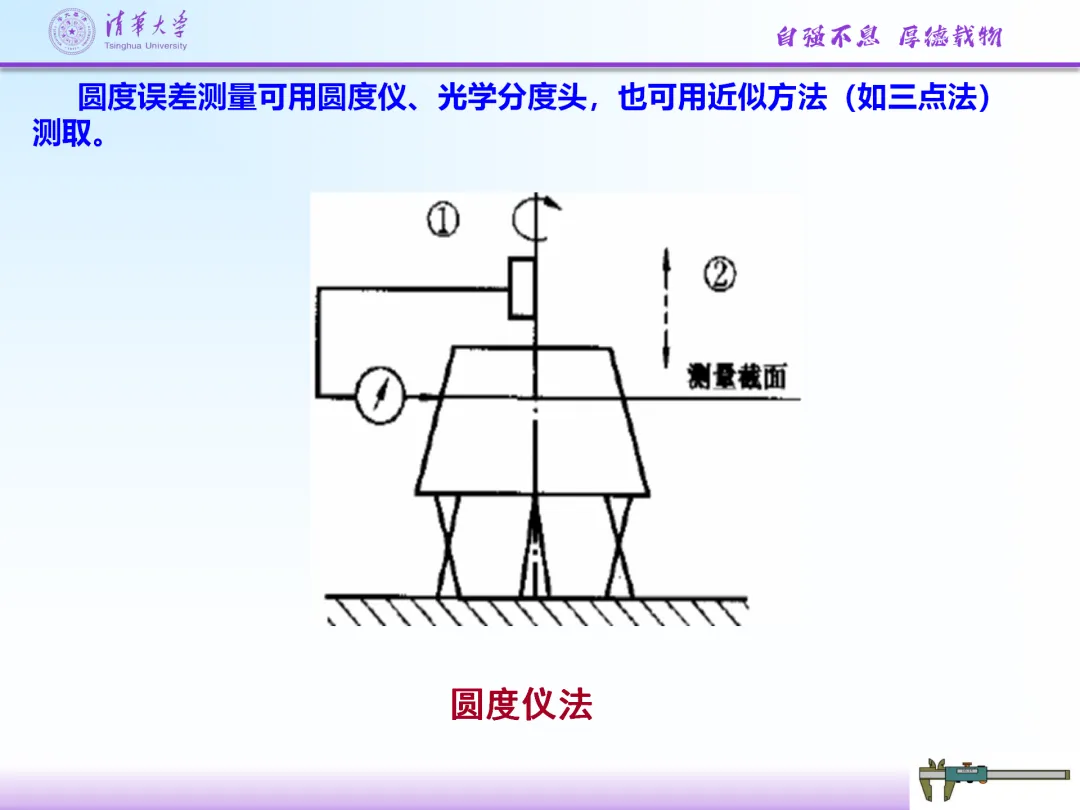
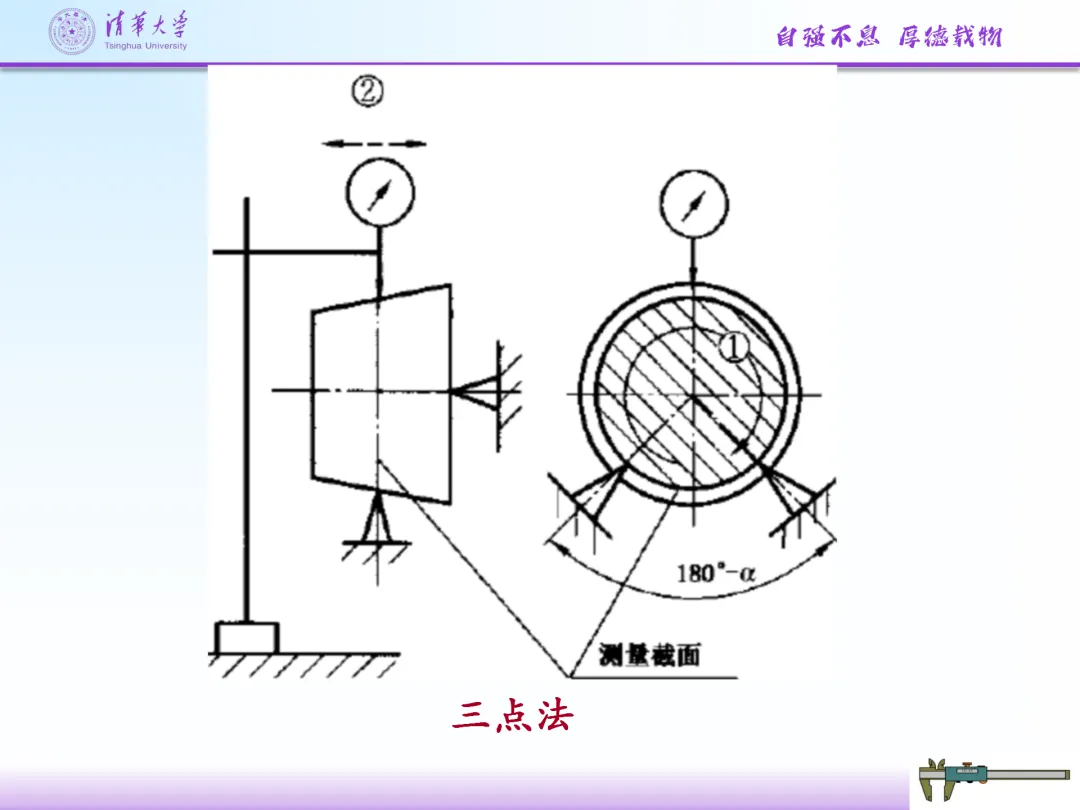
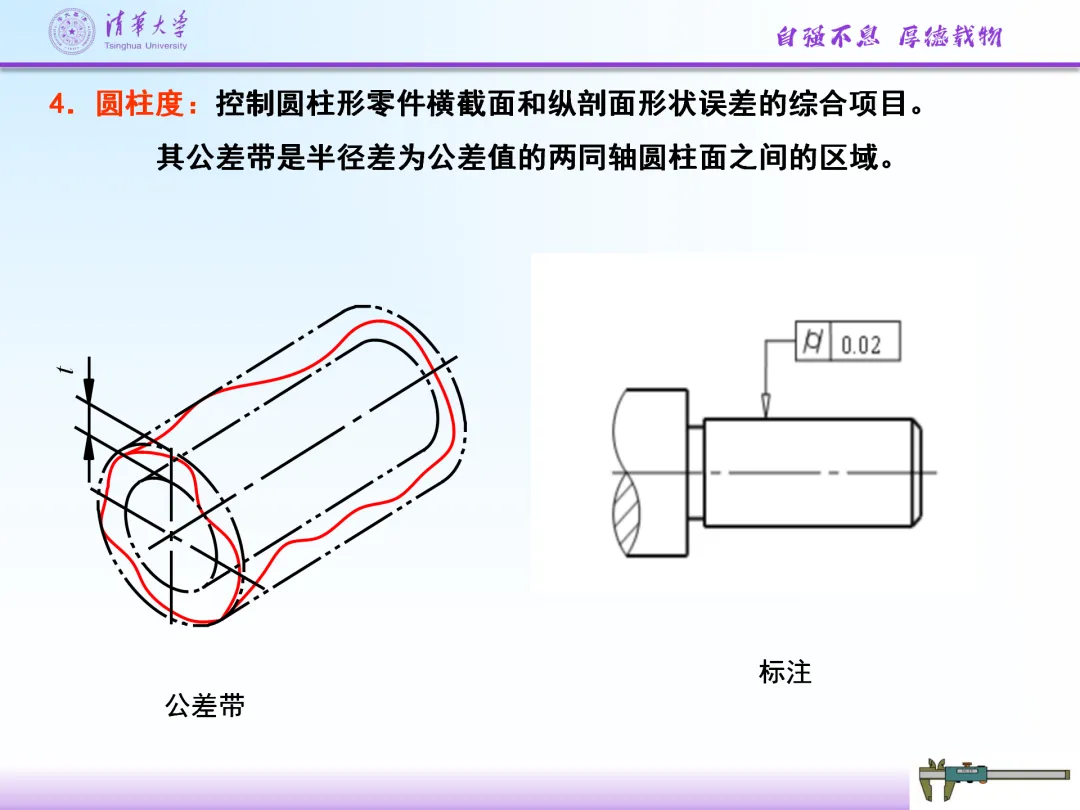
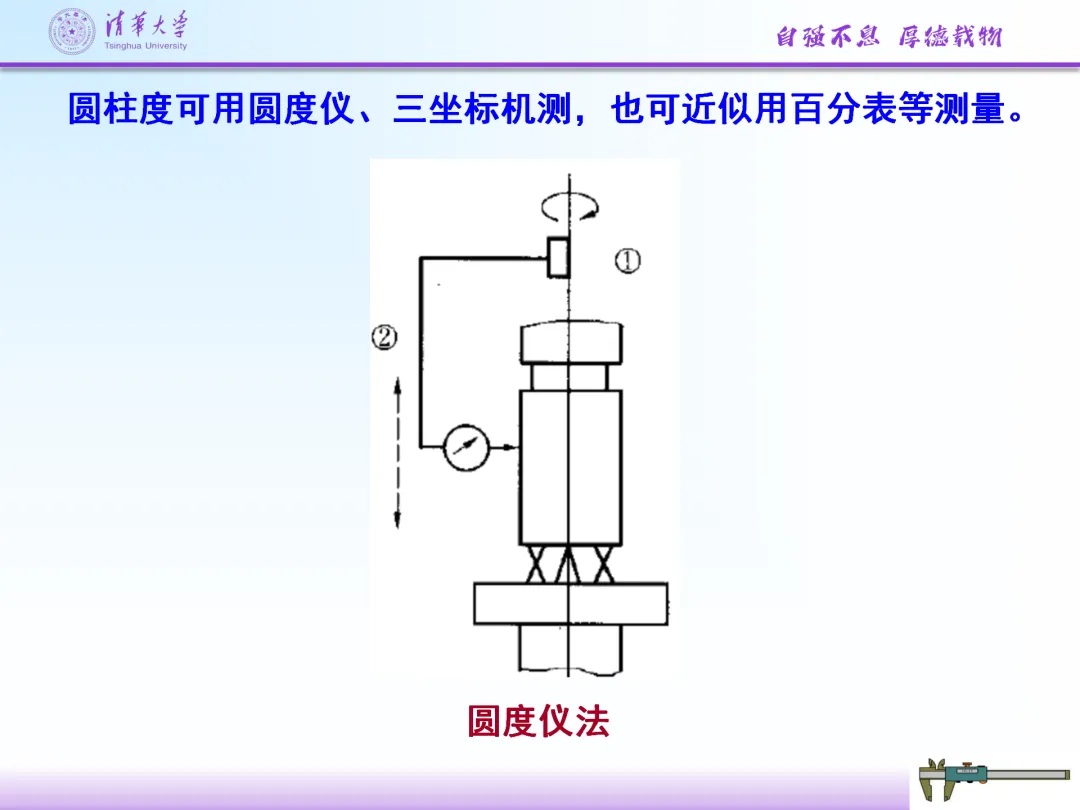
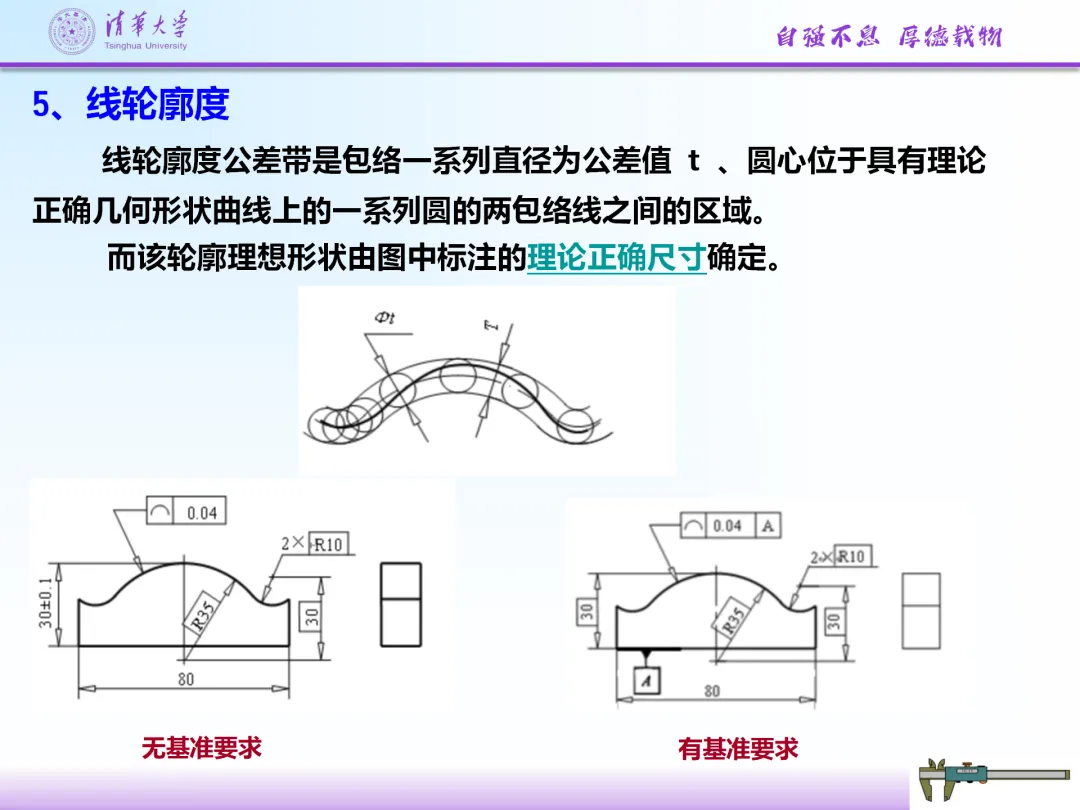
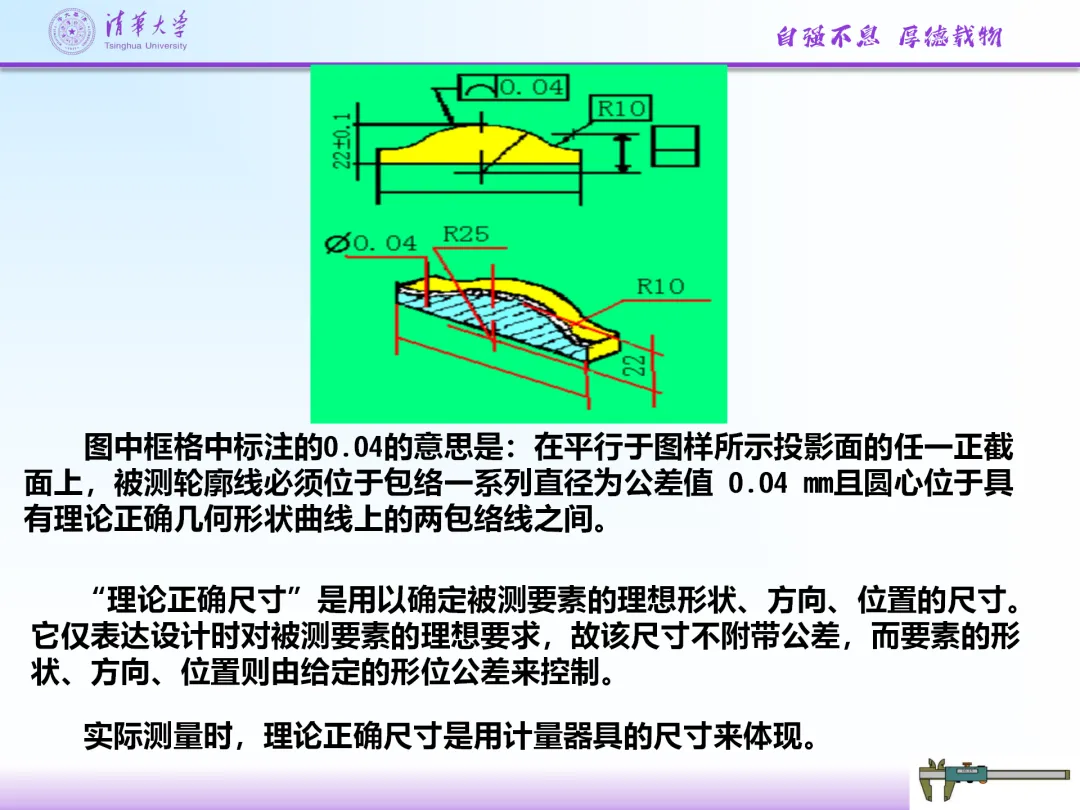
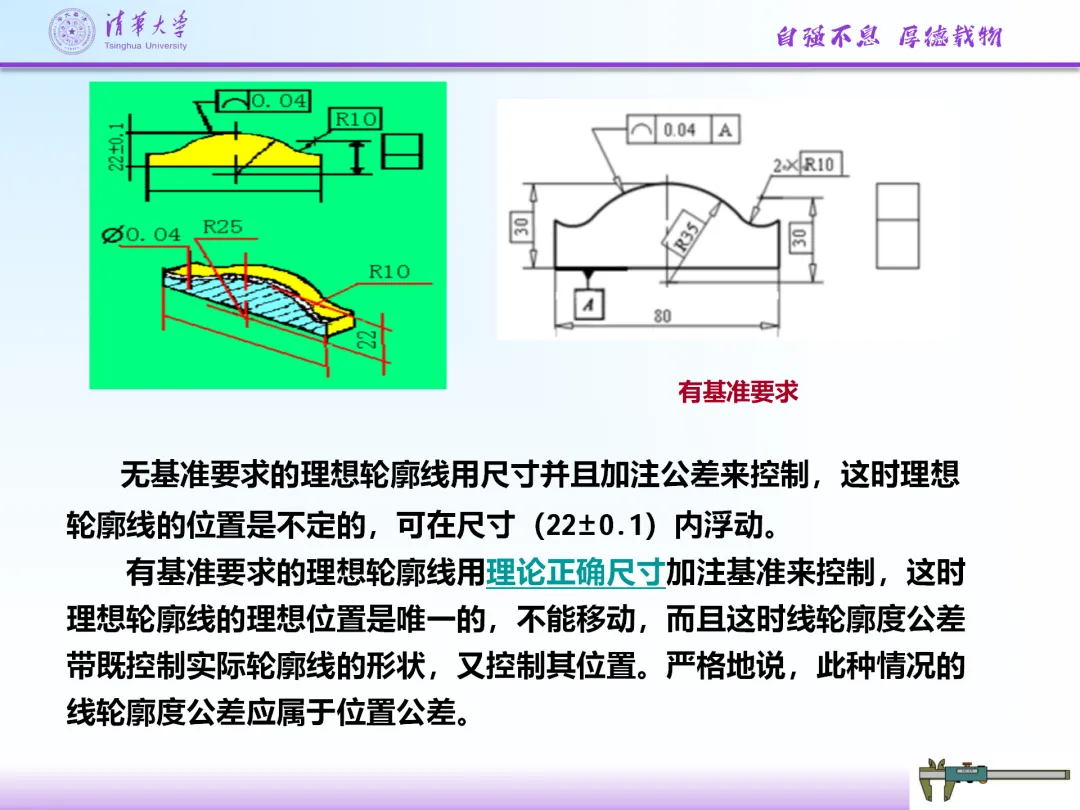
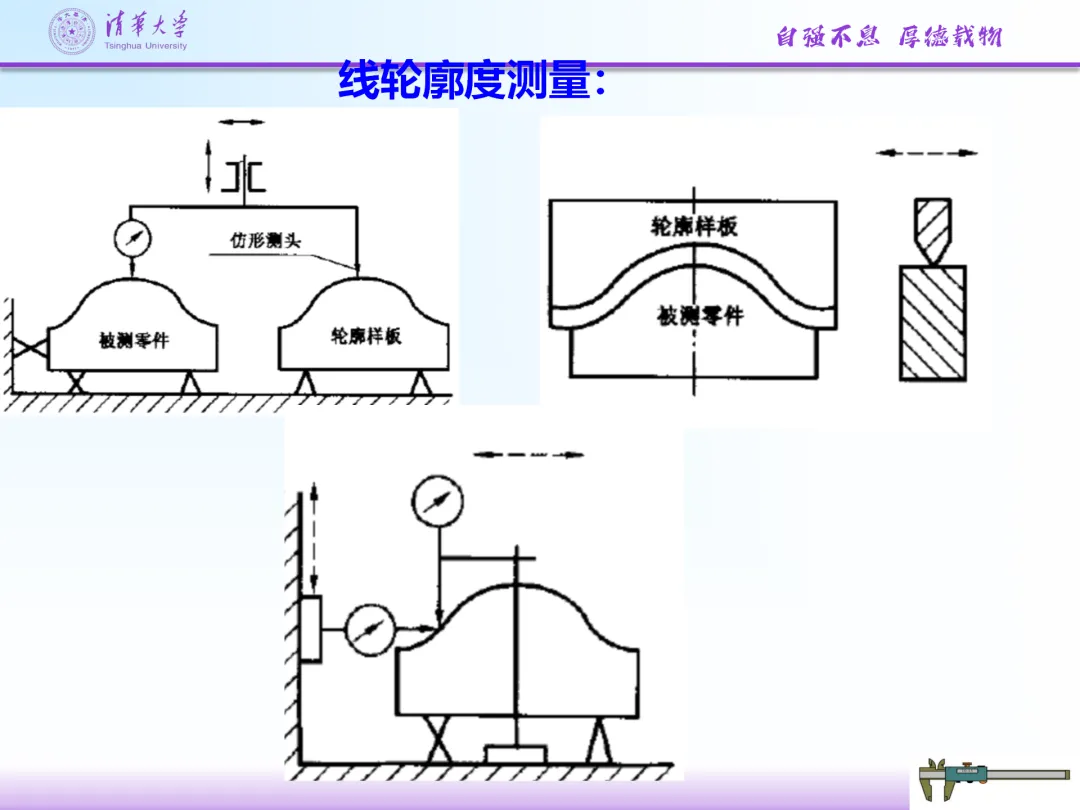
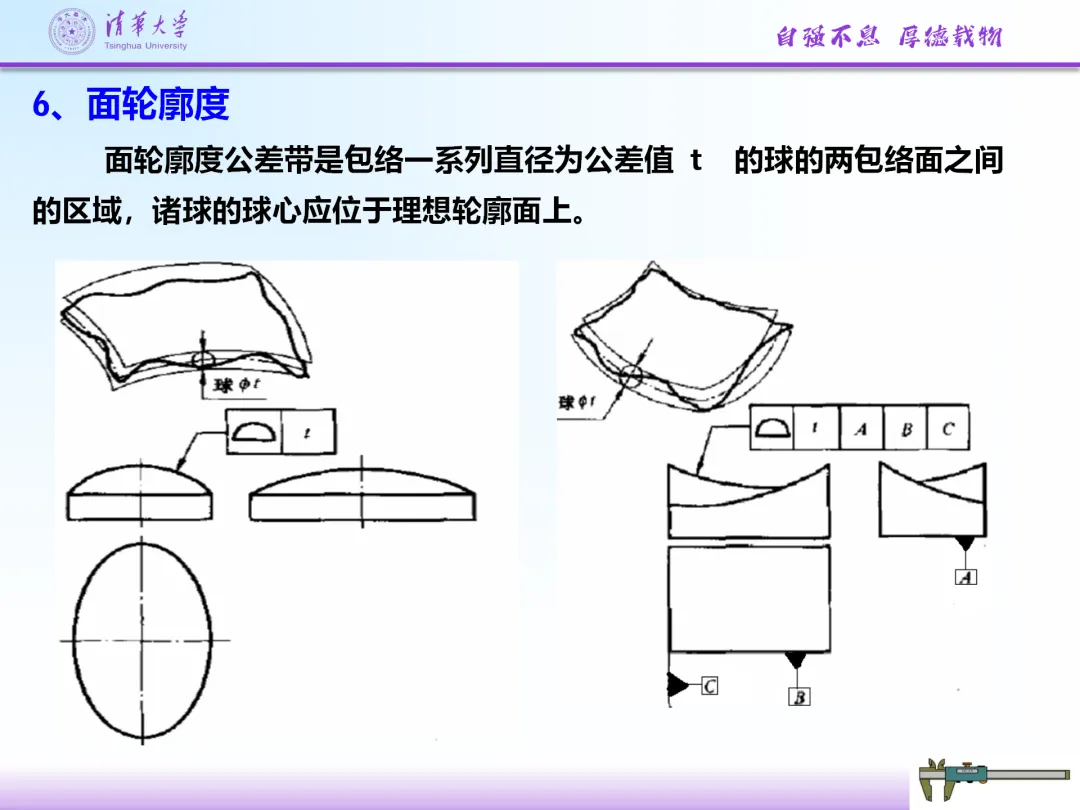
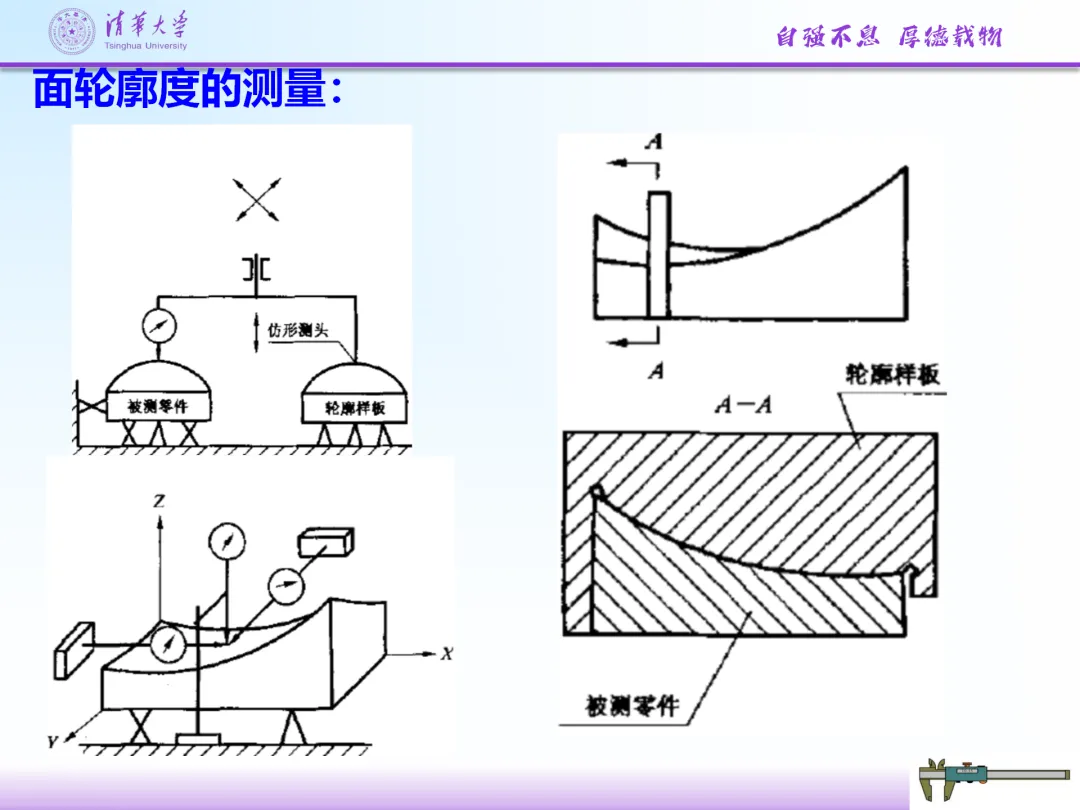
主要项目包括:直线度(限制实际直线对理想直线的变动)、平面度(限制实际平面对理想平面的变动)、圆度(限制实际圆对理想圆的变动)、圆柱度(限制实际圆柱面对理想圆柱面的变动)、线轮廓度和面轮廓度(限制非圆曲线或曲面的形状精度)。
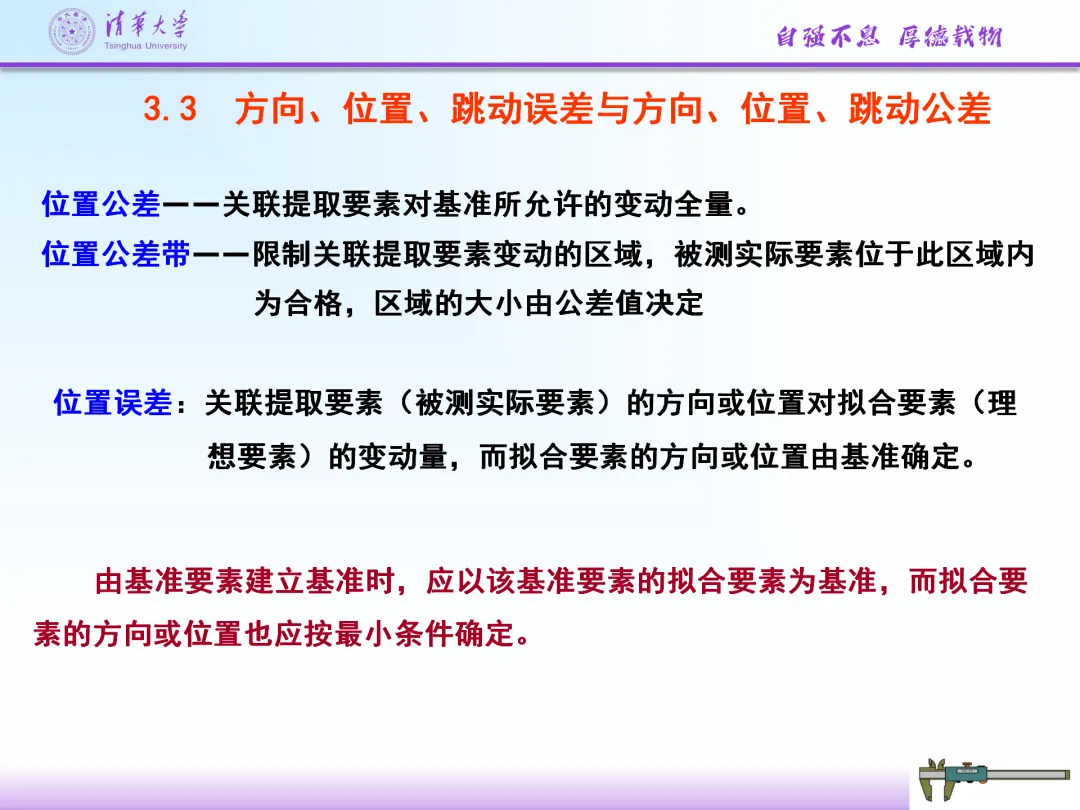
三、位置公差
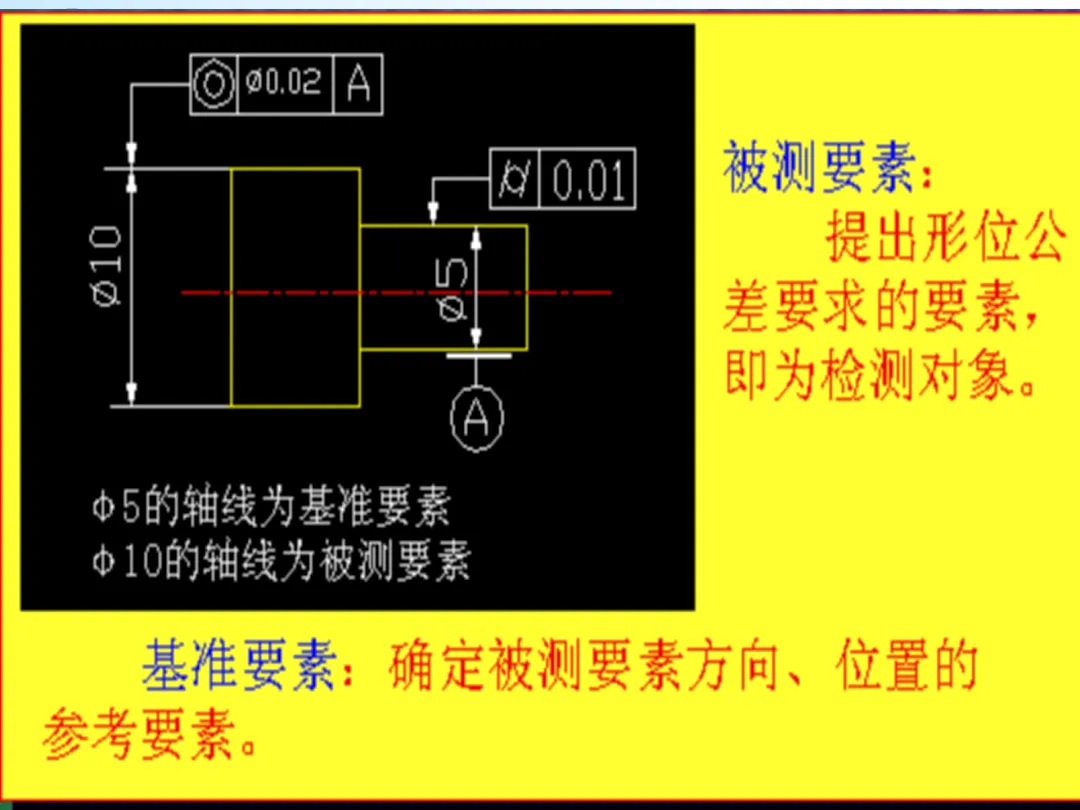
位置公差是指关联实际要素的位置对基准所允许的变动全量,包括定向公差和定位公差。
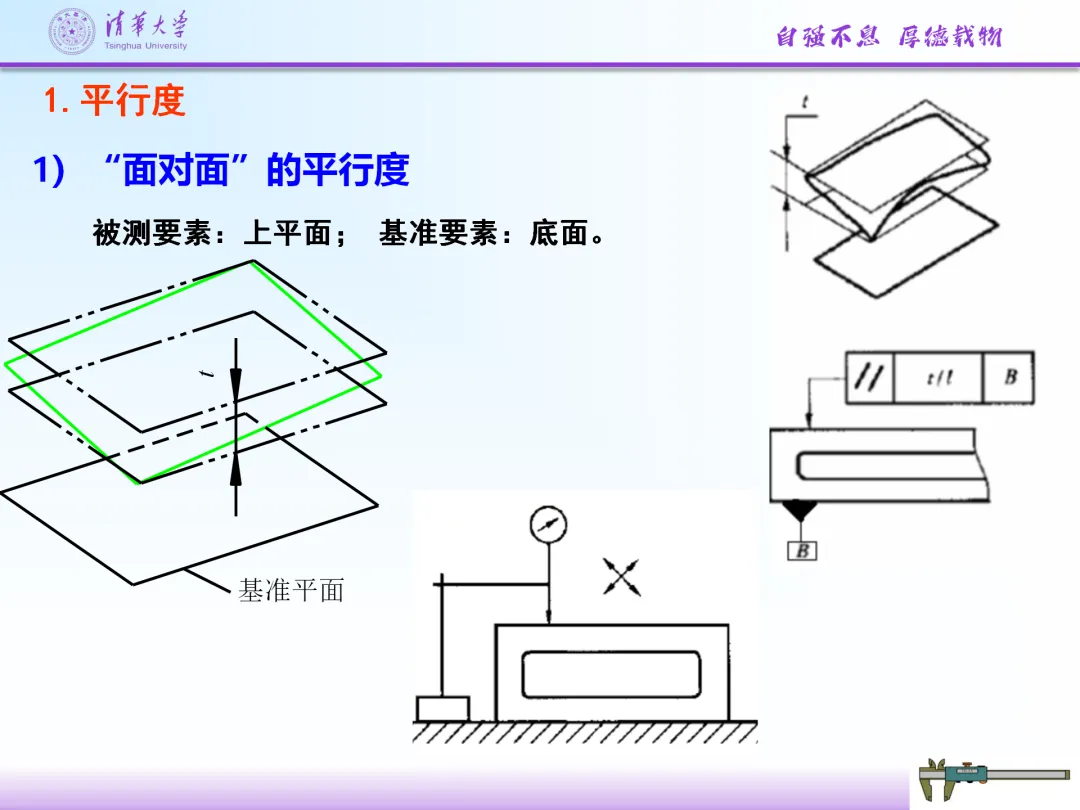
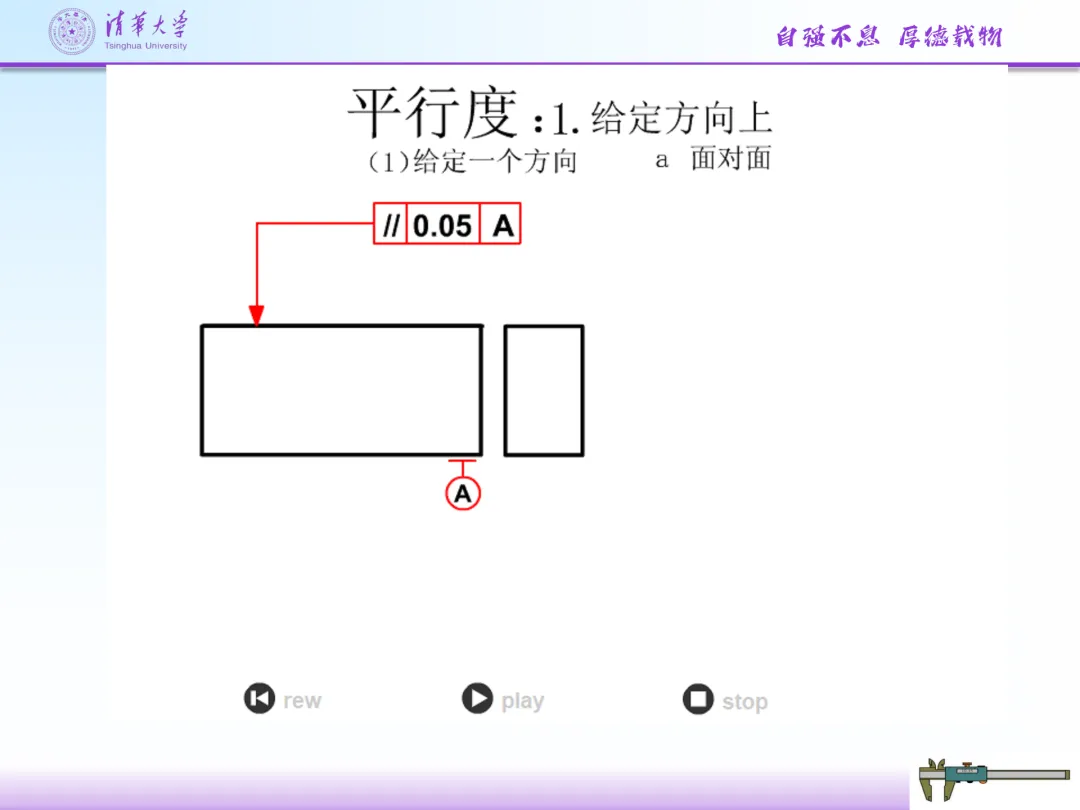
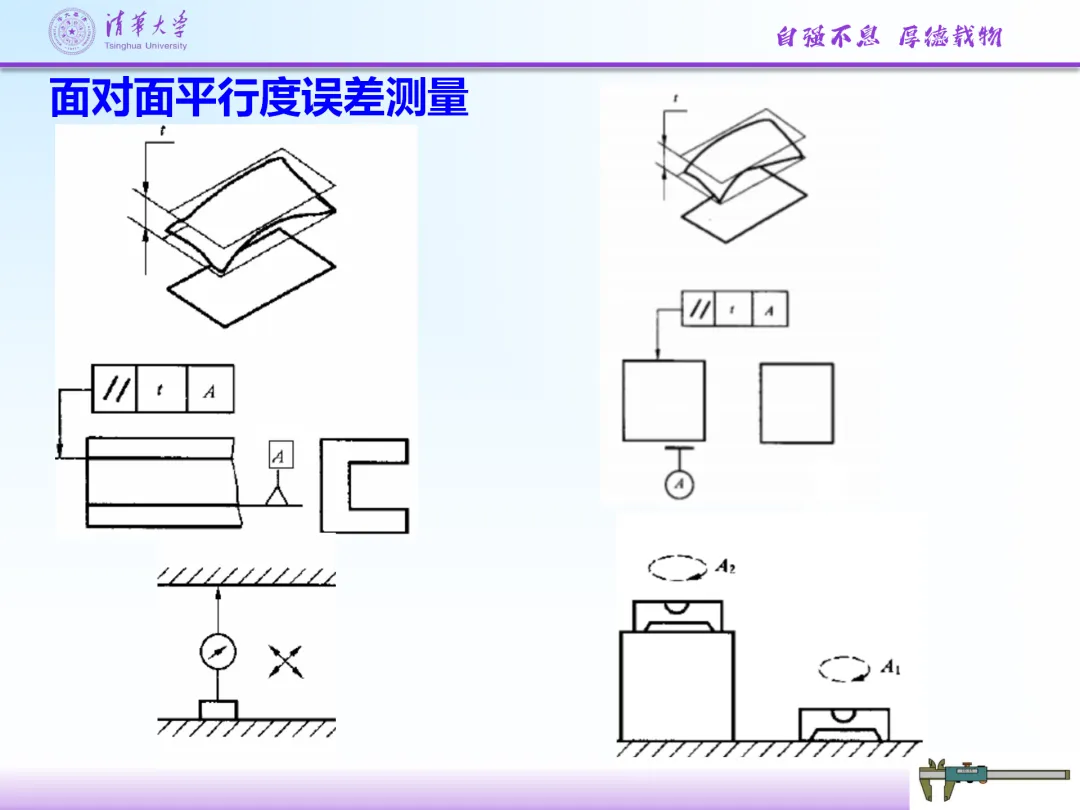
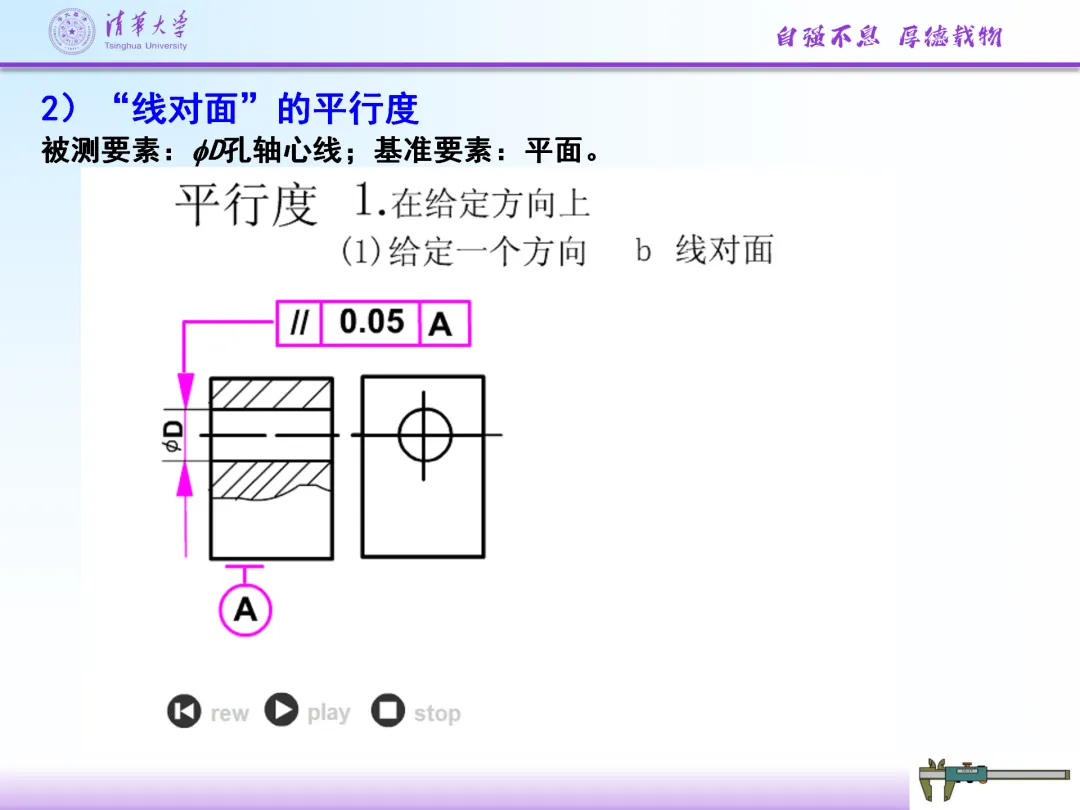
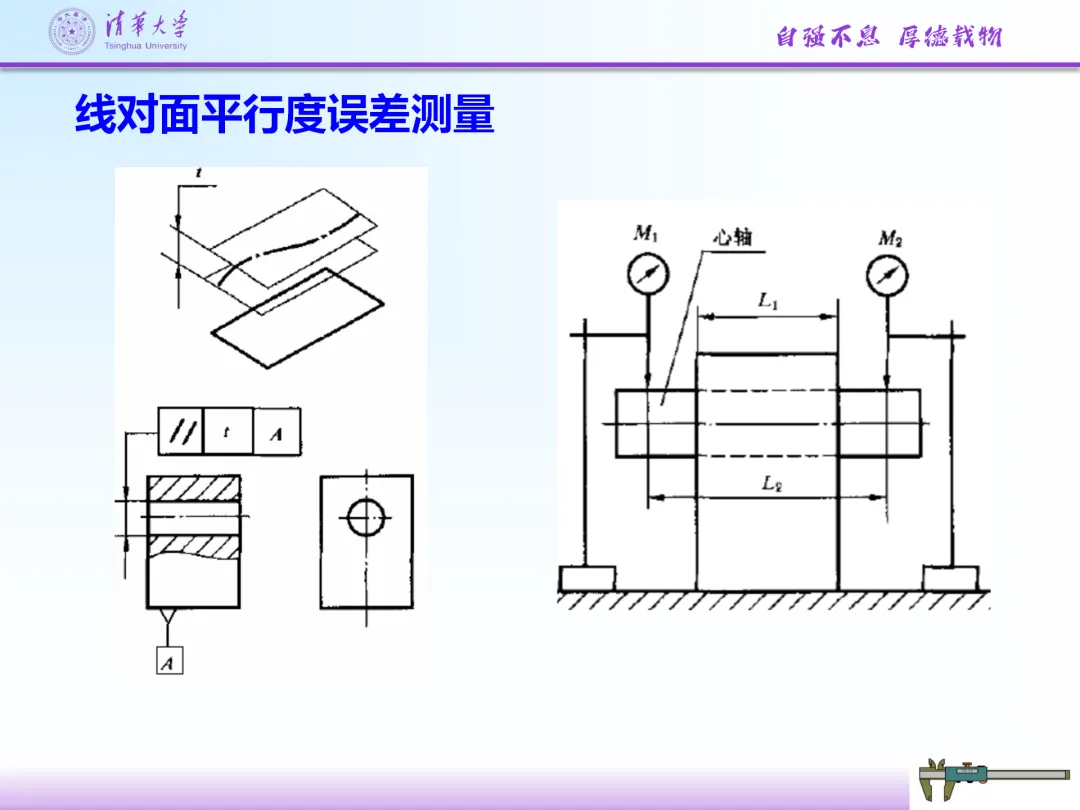
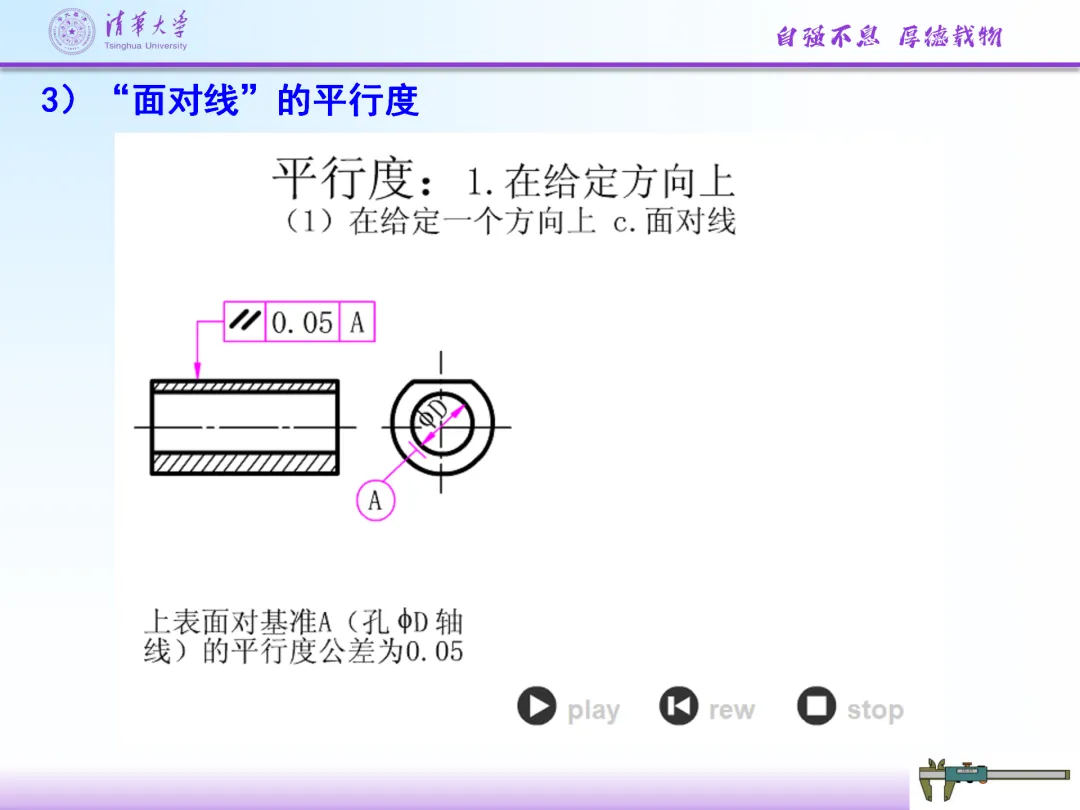
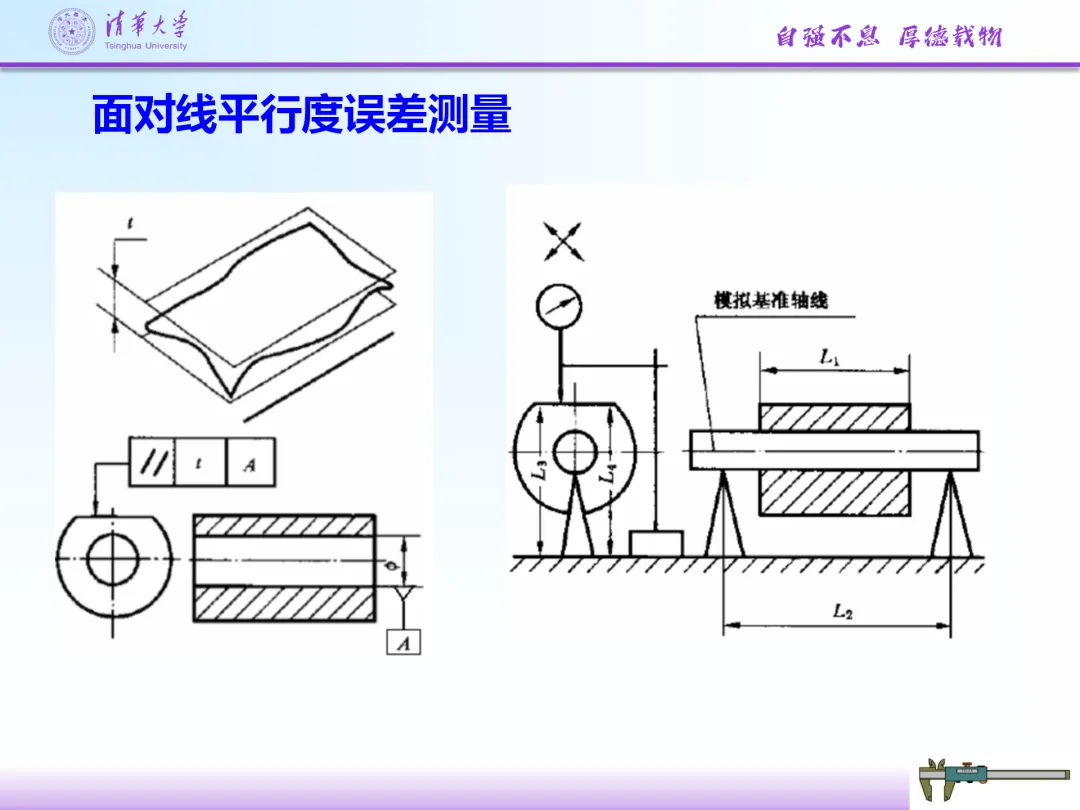
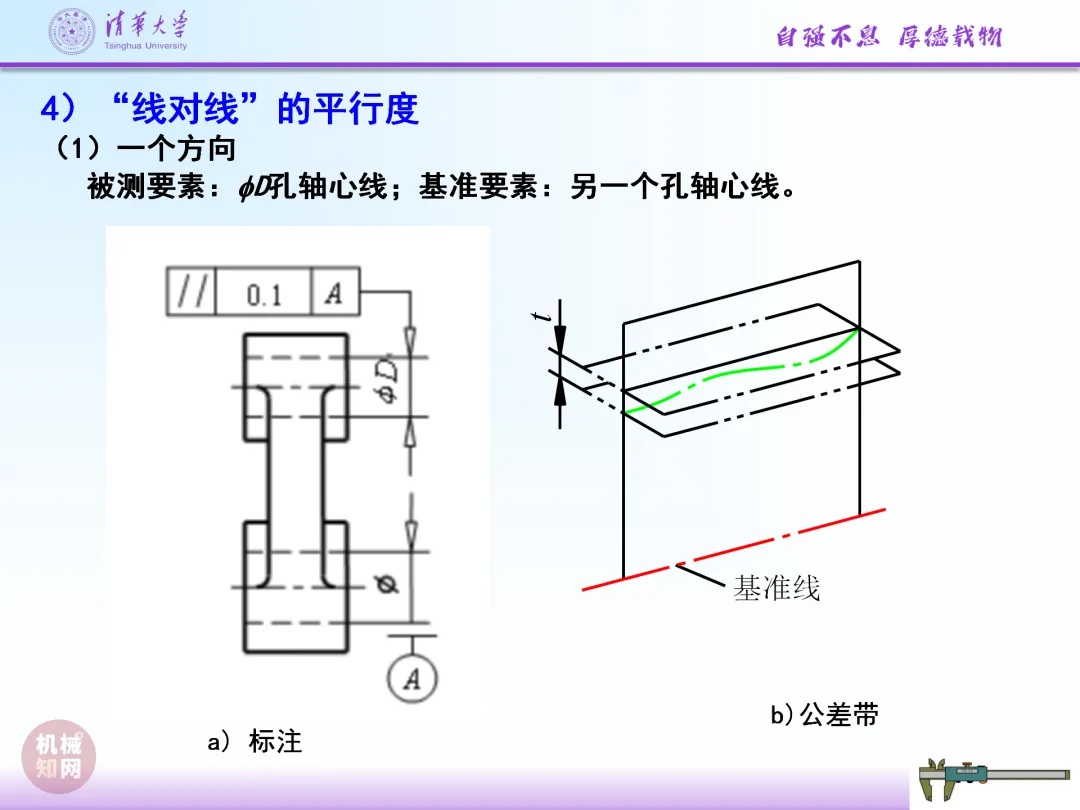
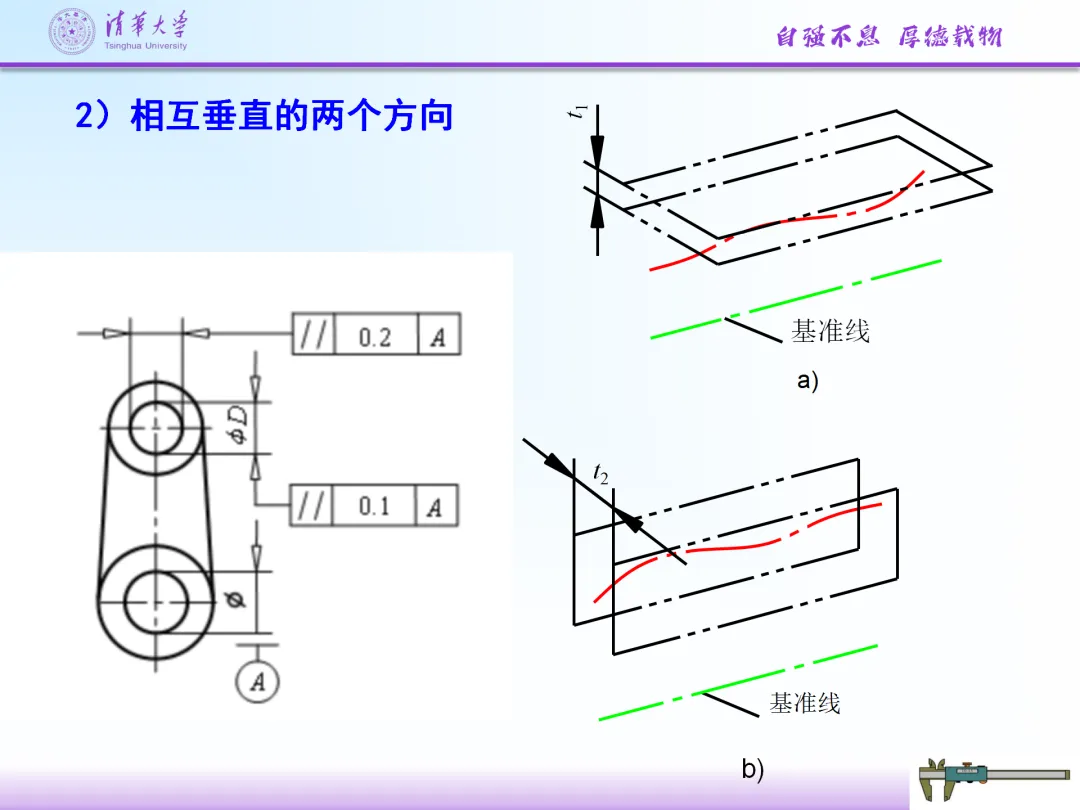
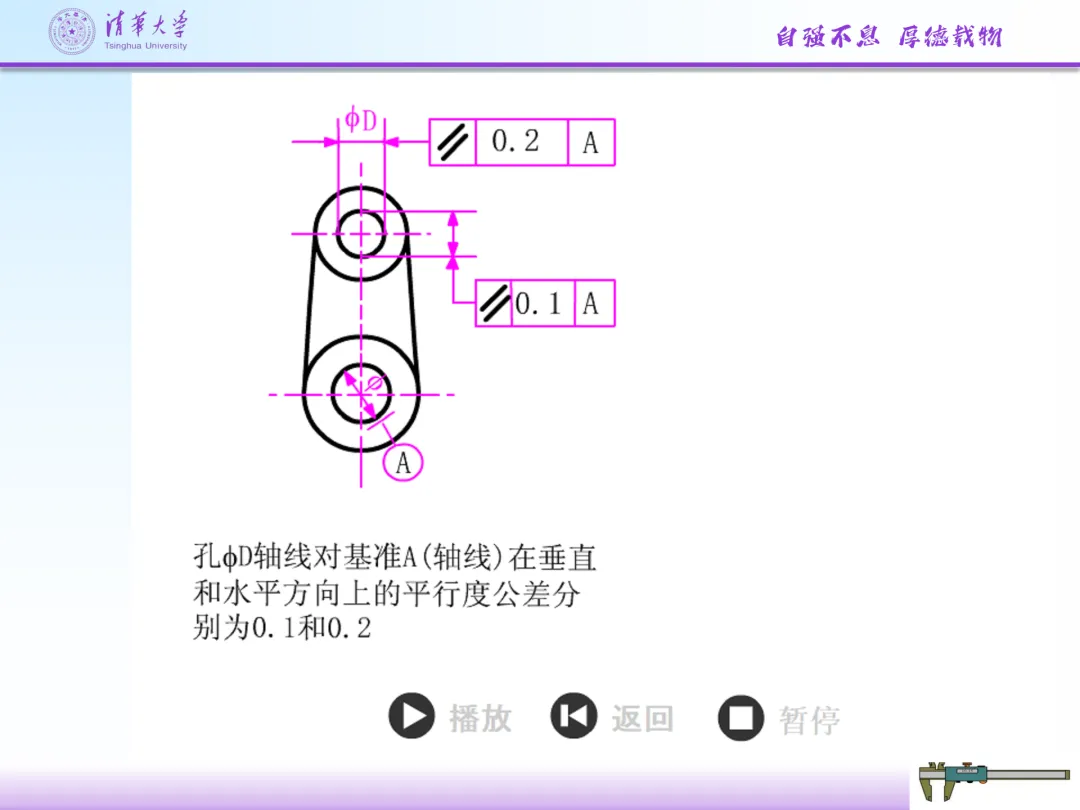
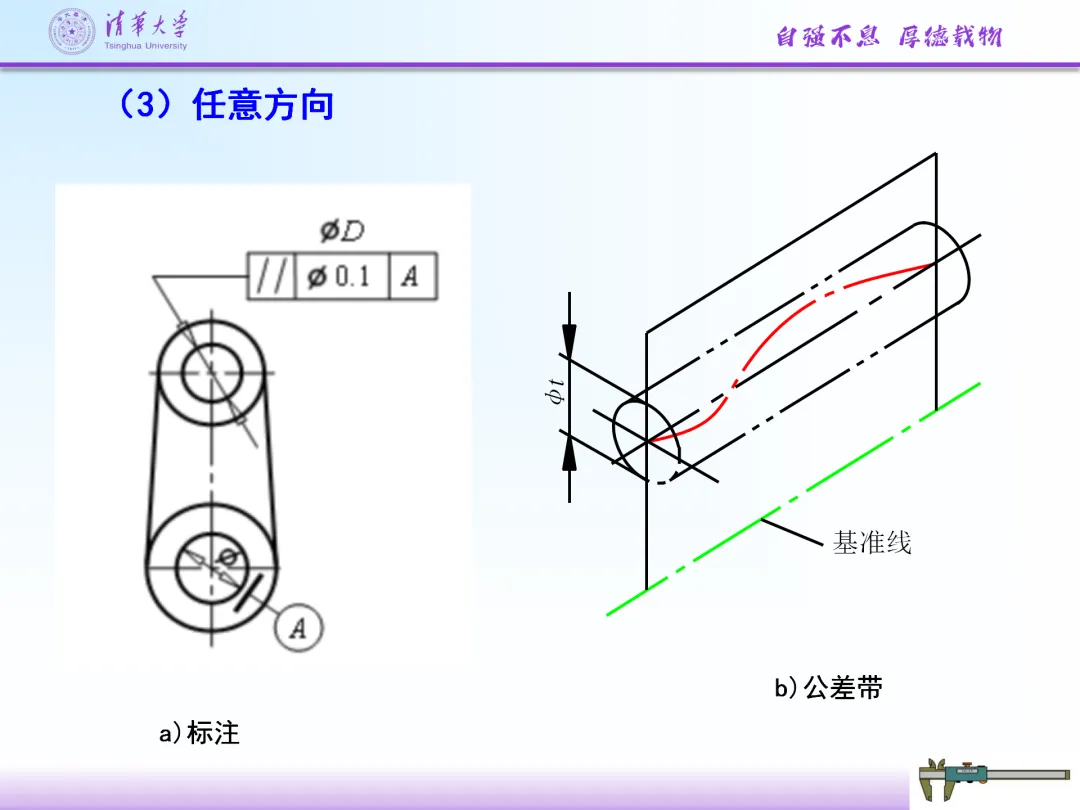
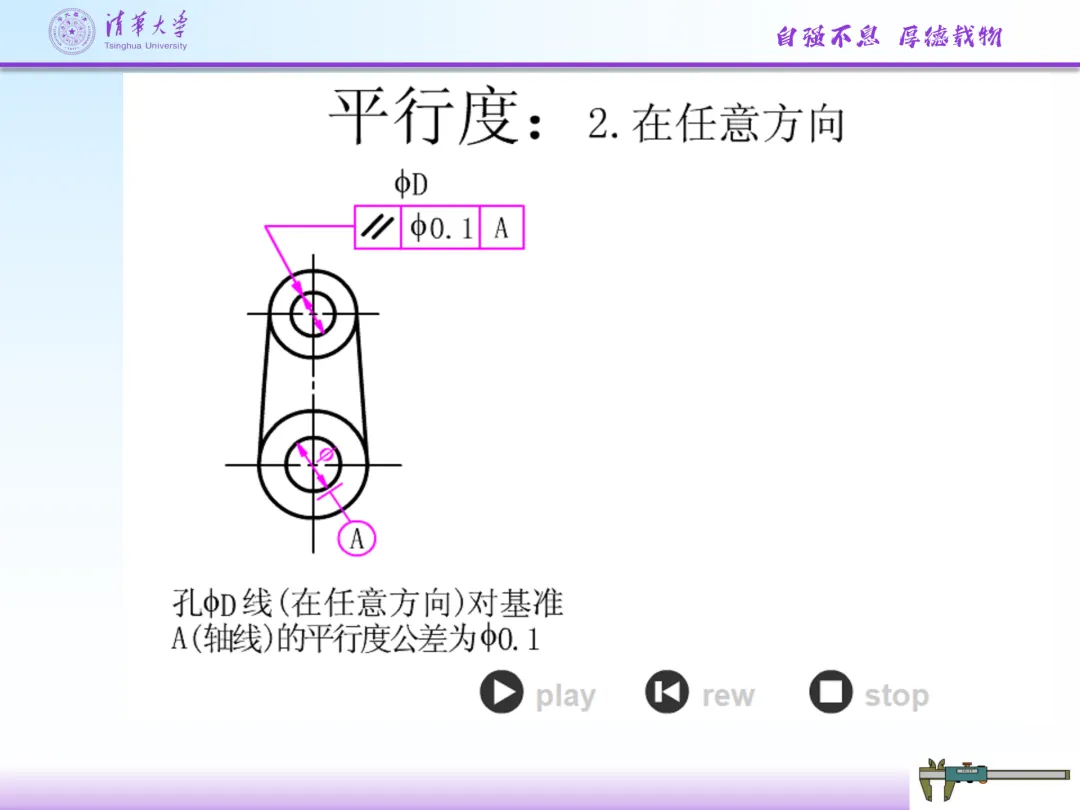
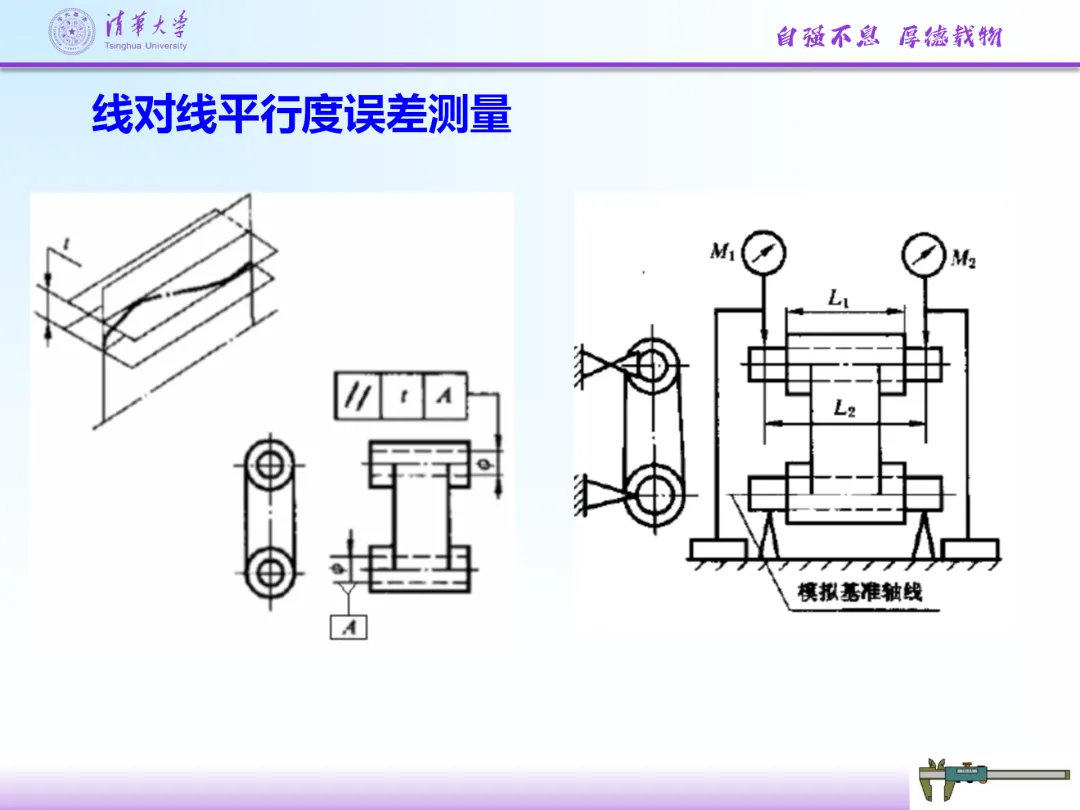
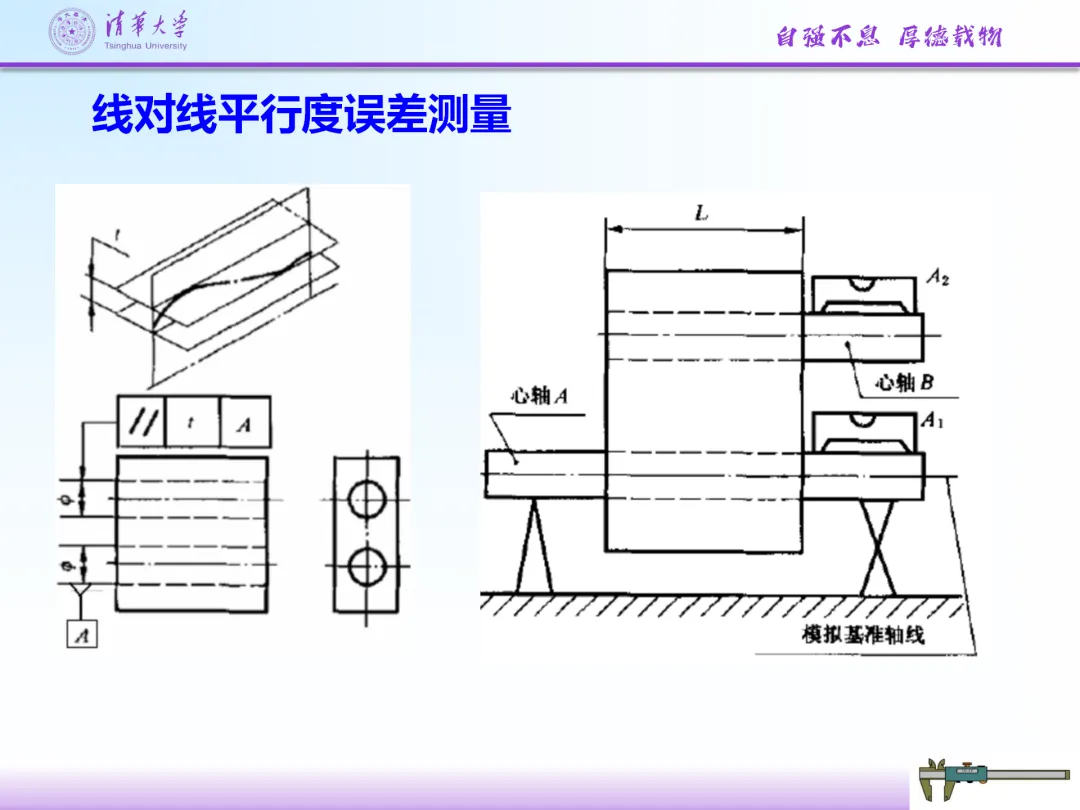
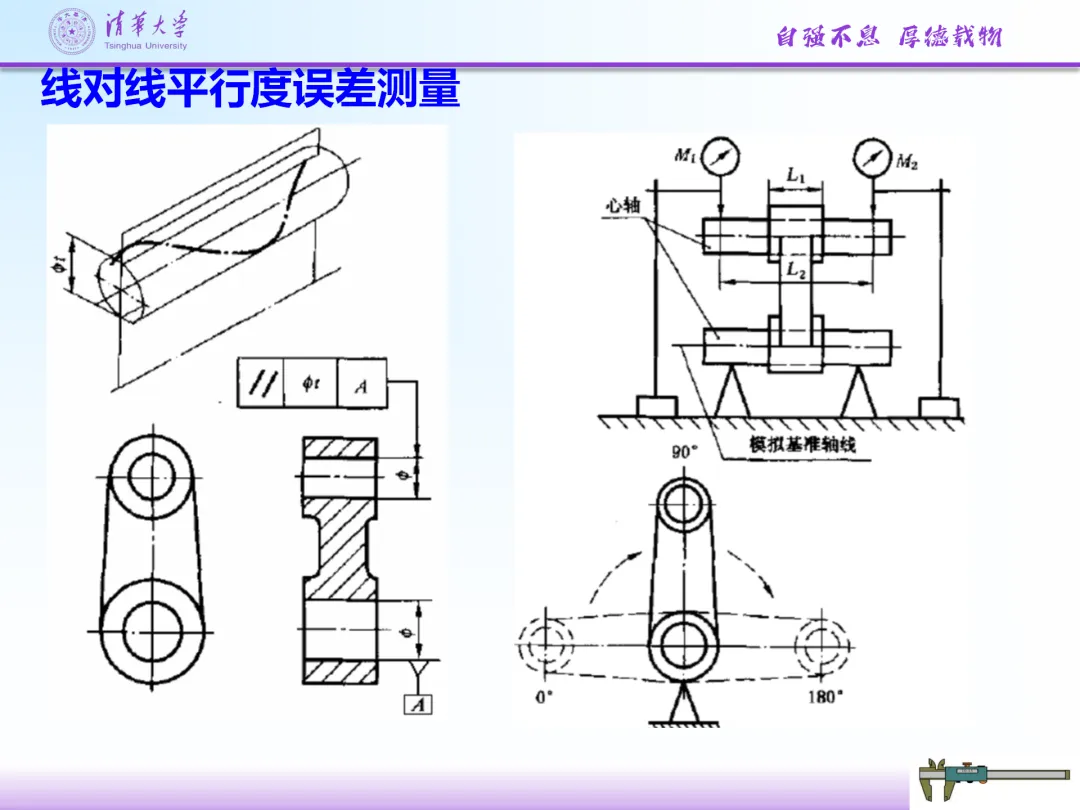
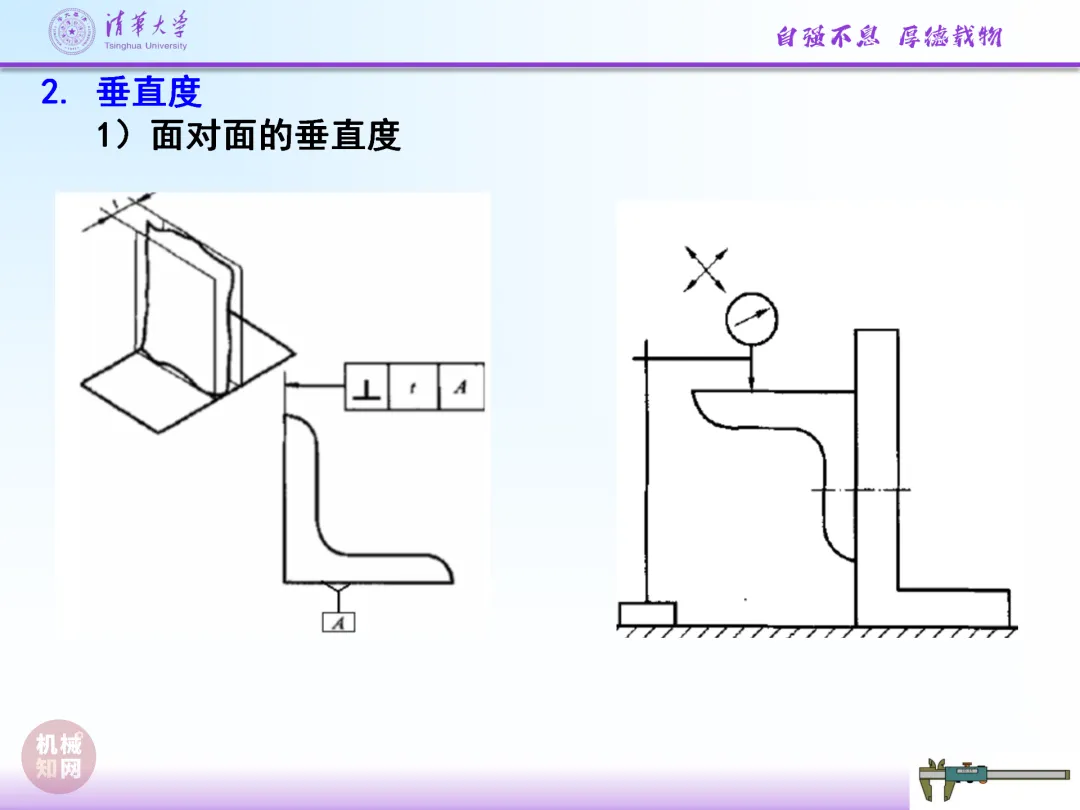
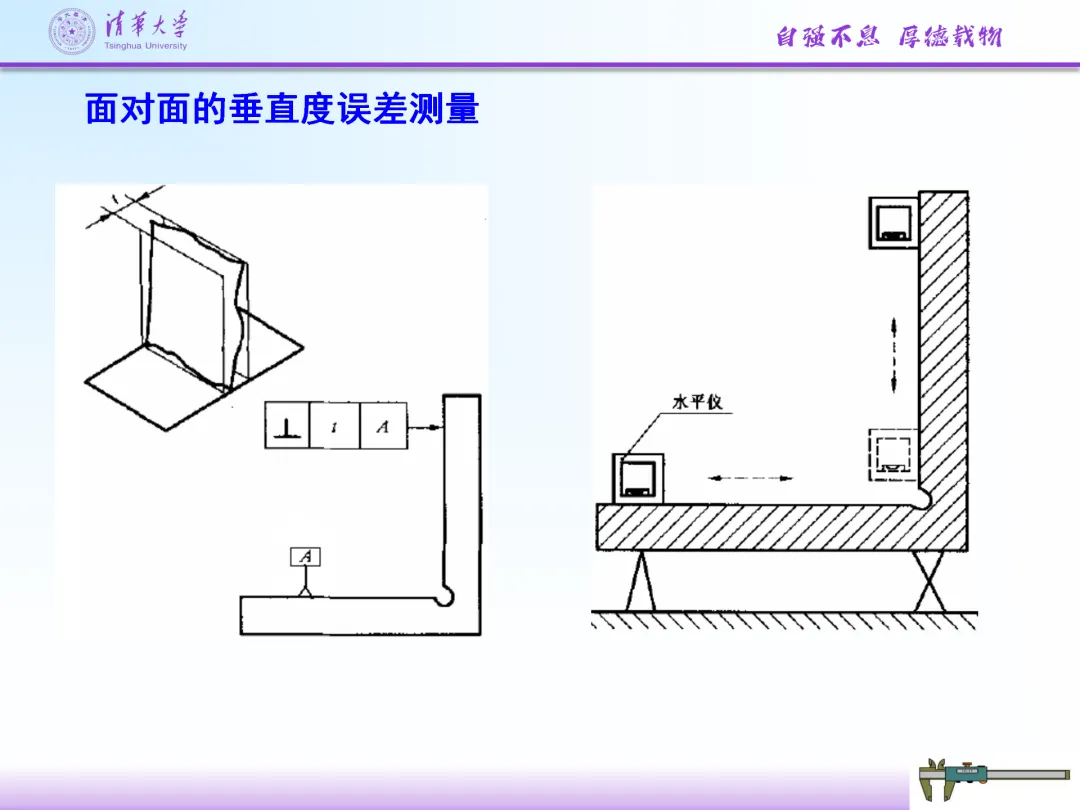
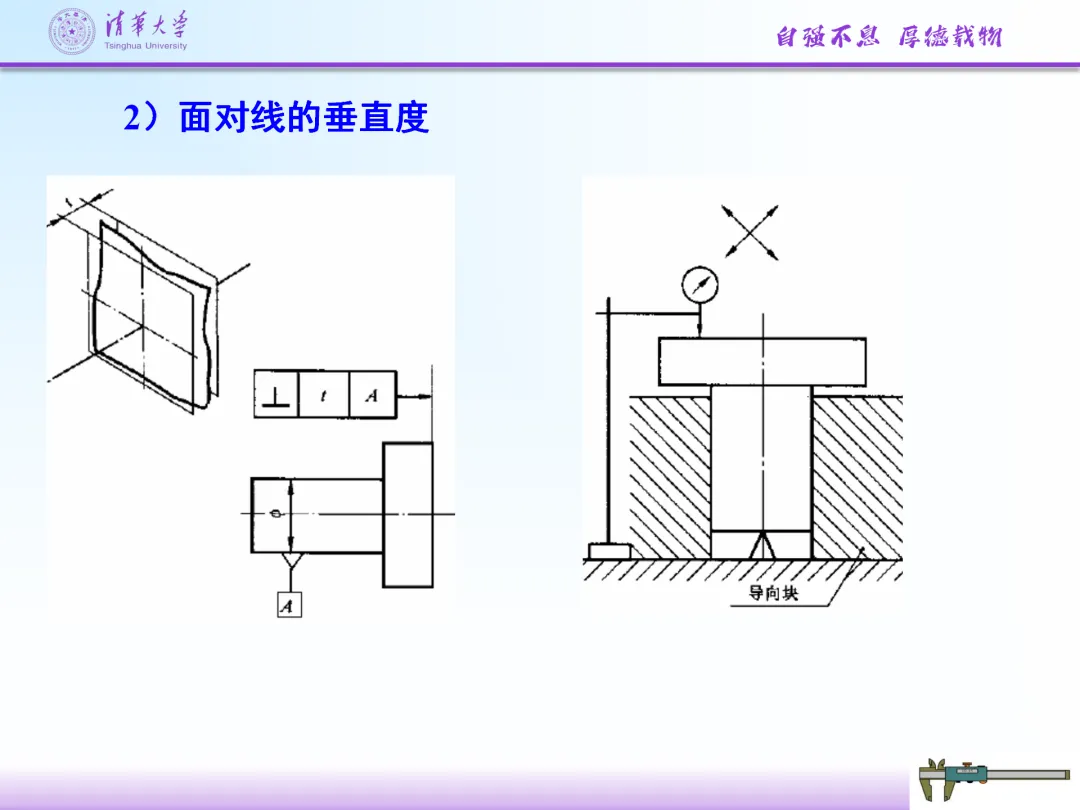
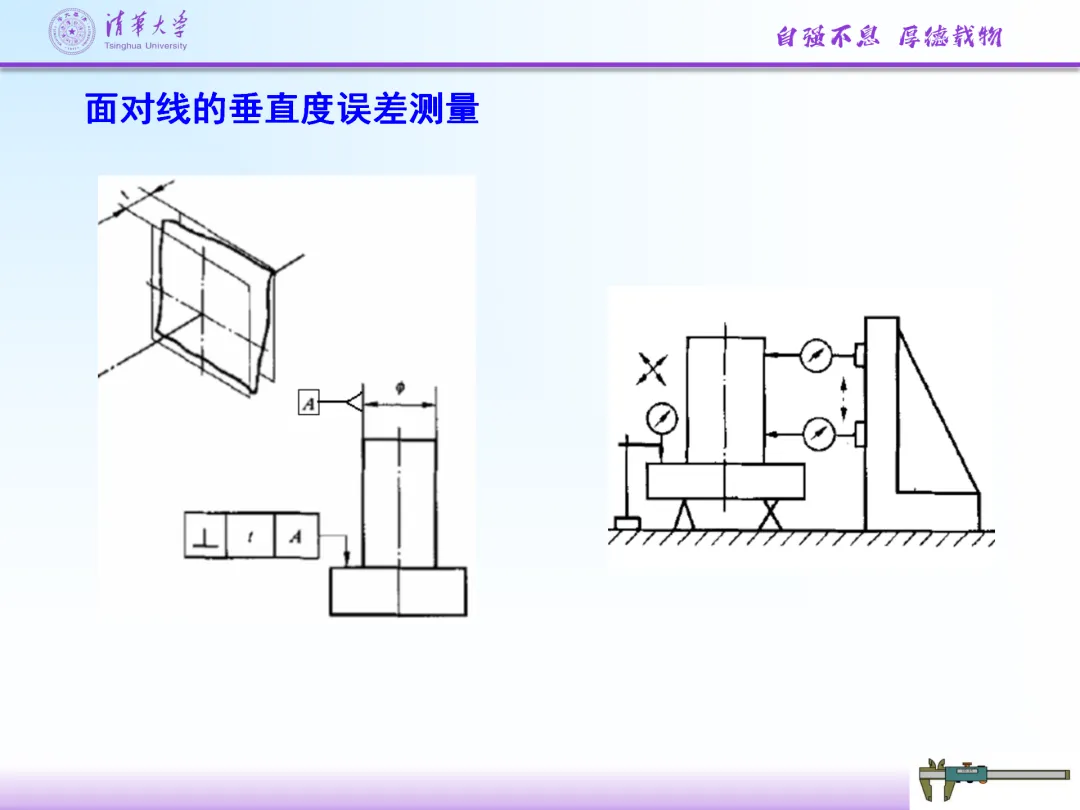
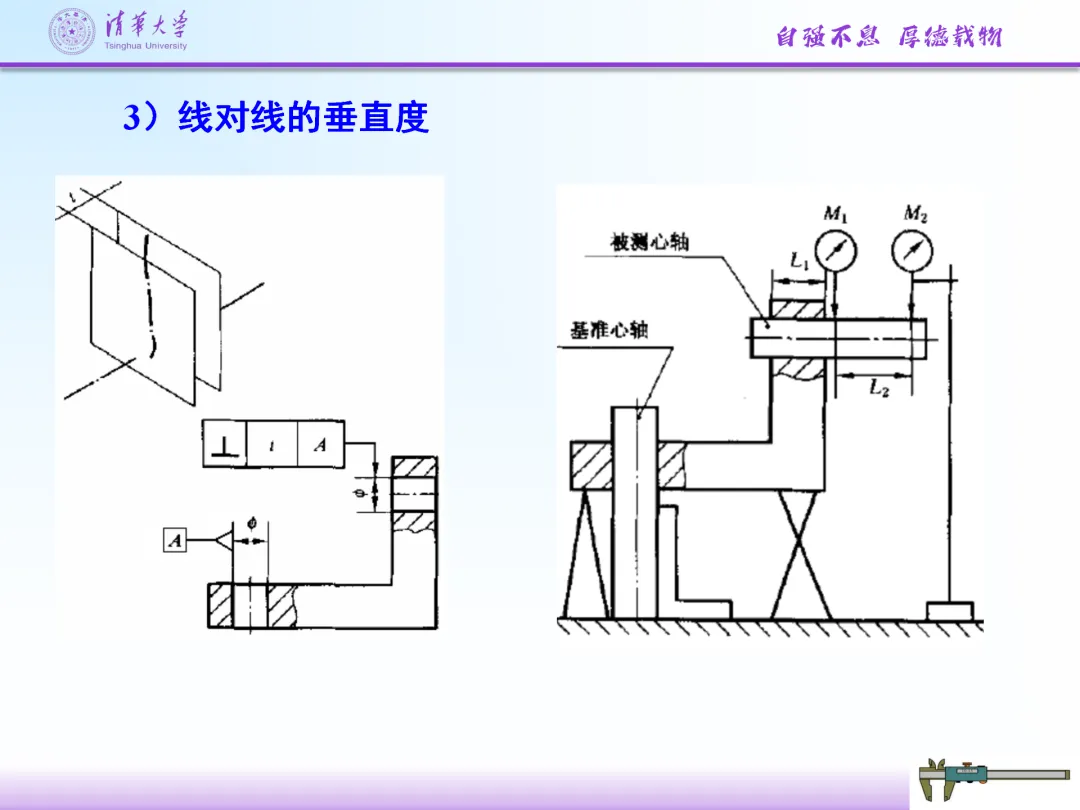
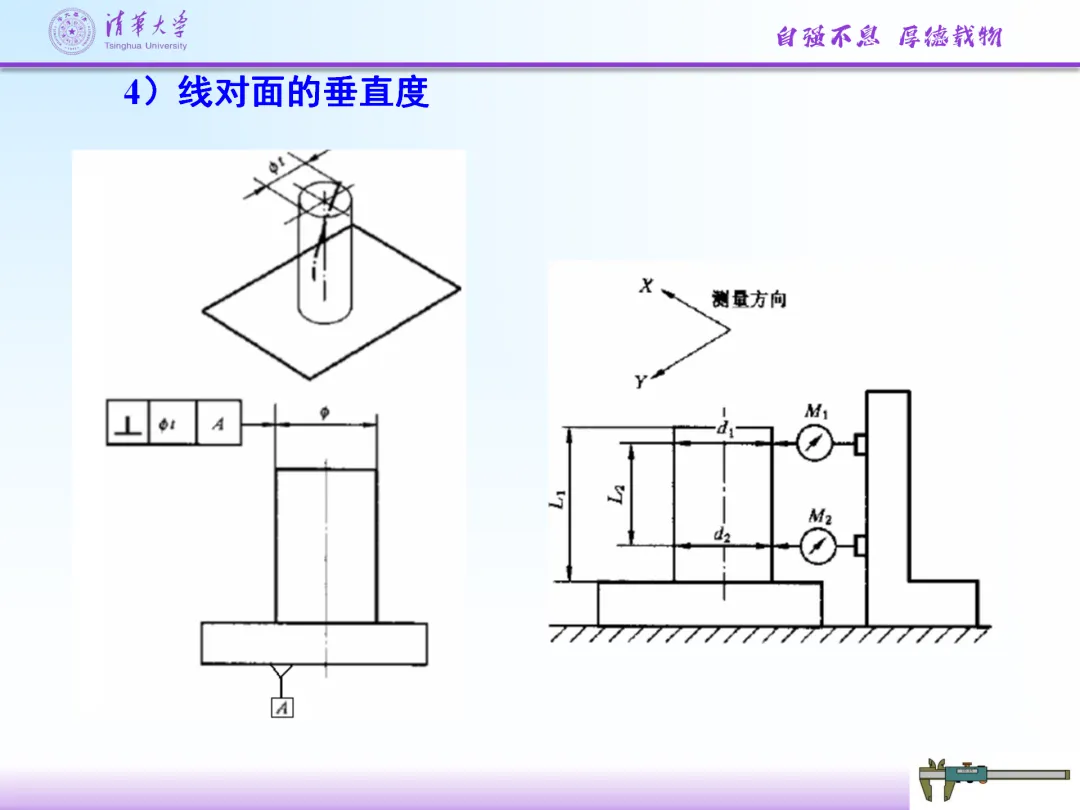
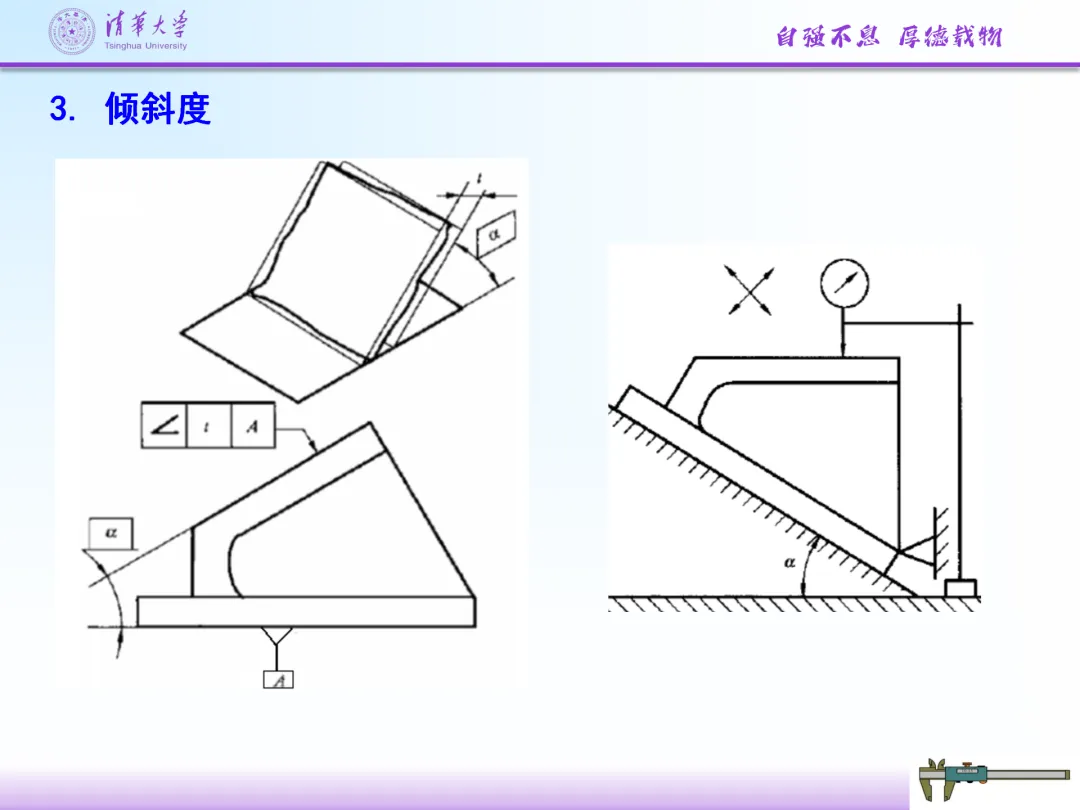
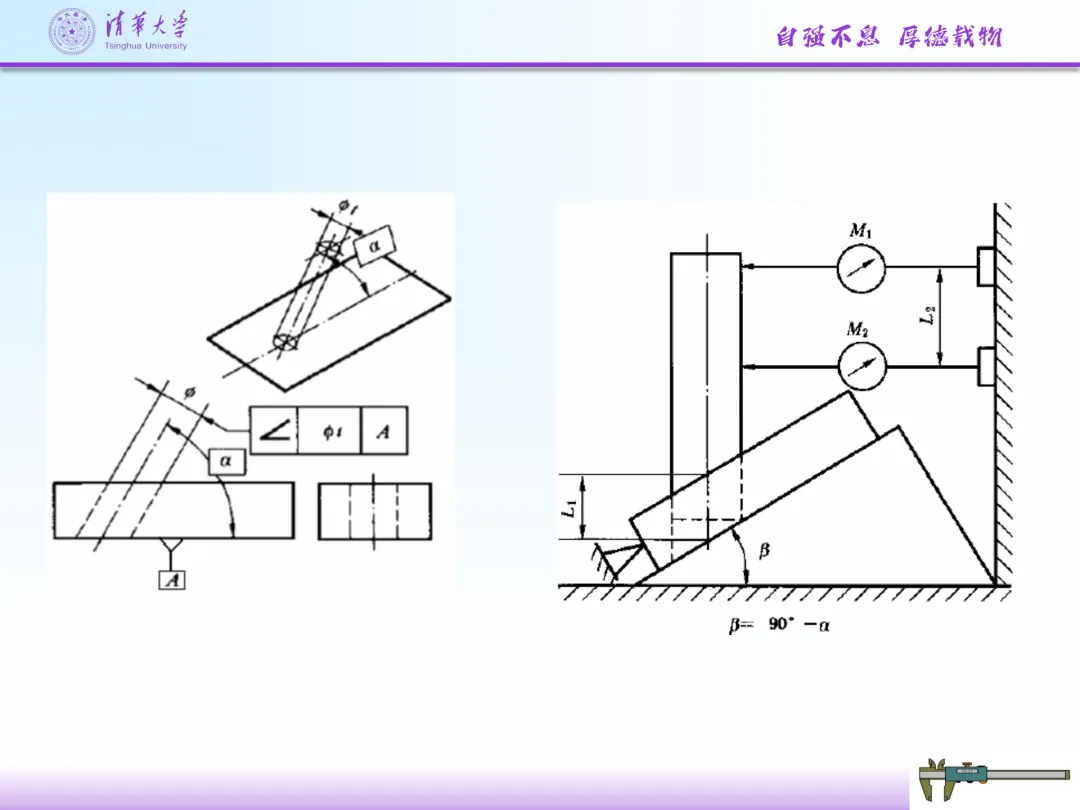
定向公差控制被测要素对基准的方向误差,有平行度(要求被测要素对基准等距)、垂直度(要求被测要素对基准成90°)、倾斜度(要求被测要素对基准成给定角度)三项。
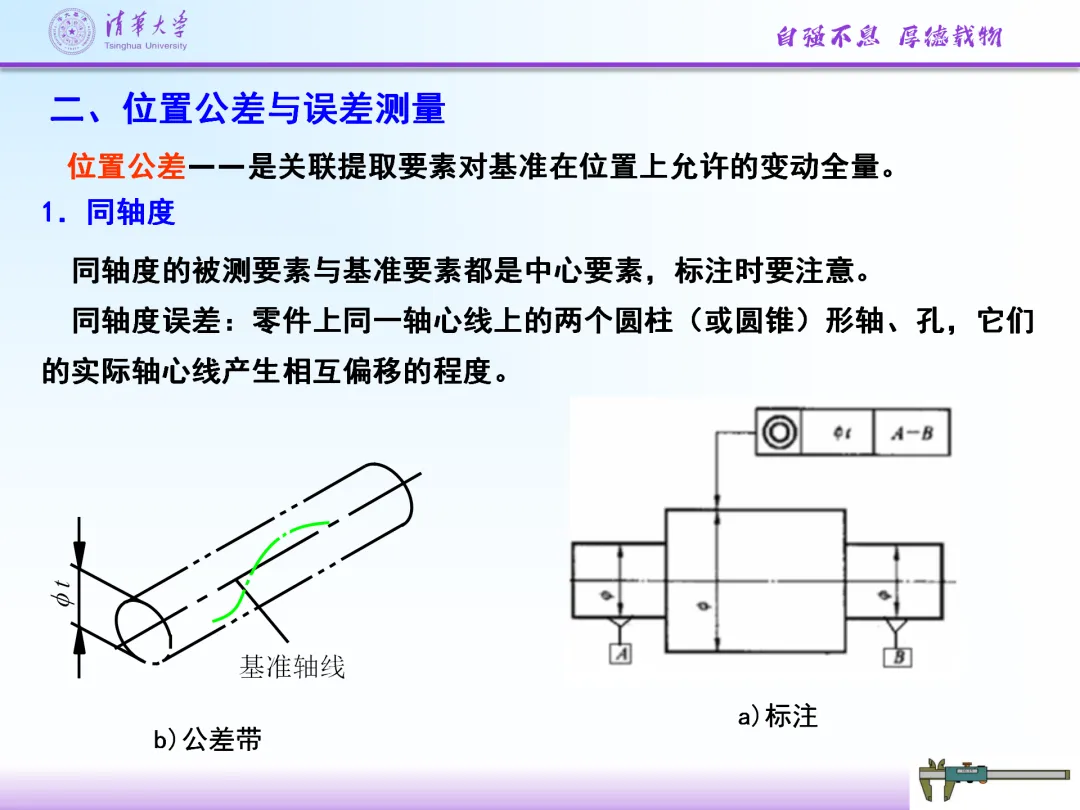
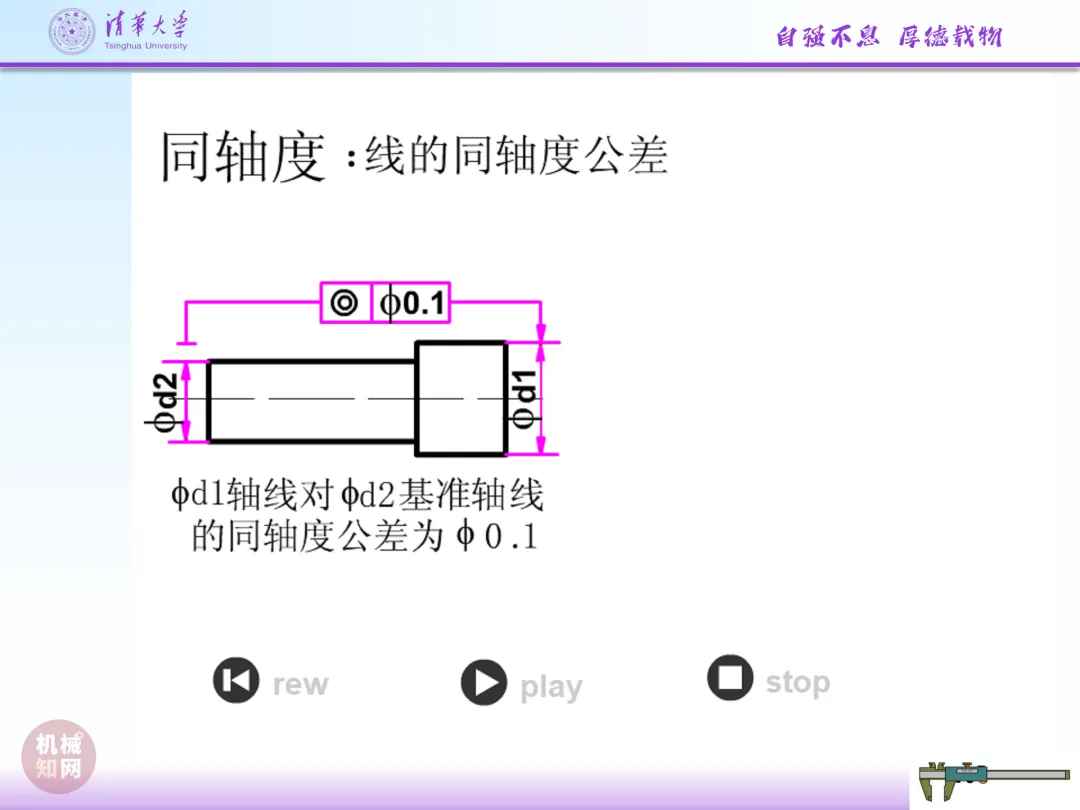
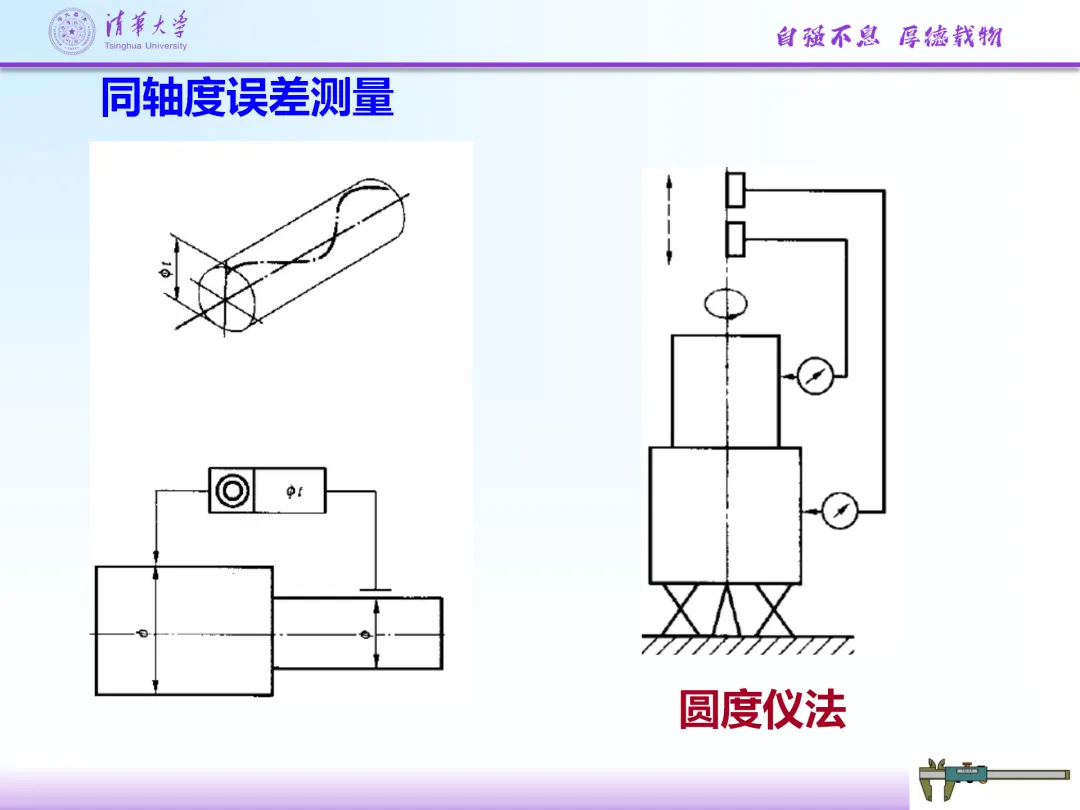
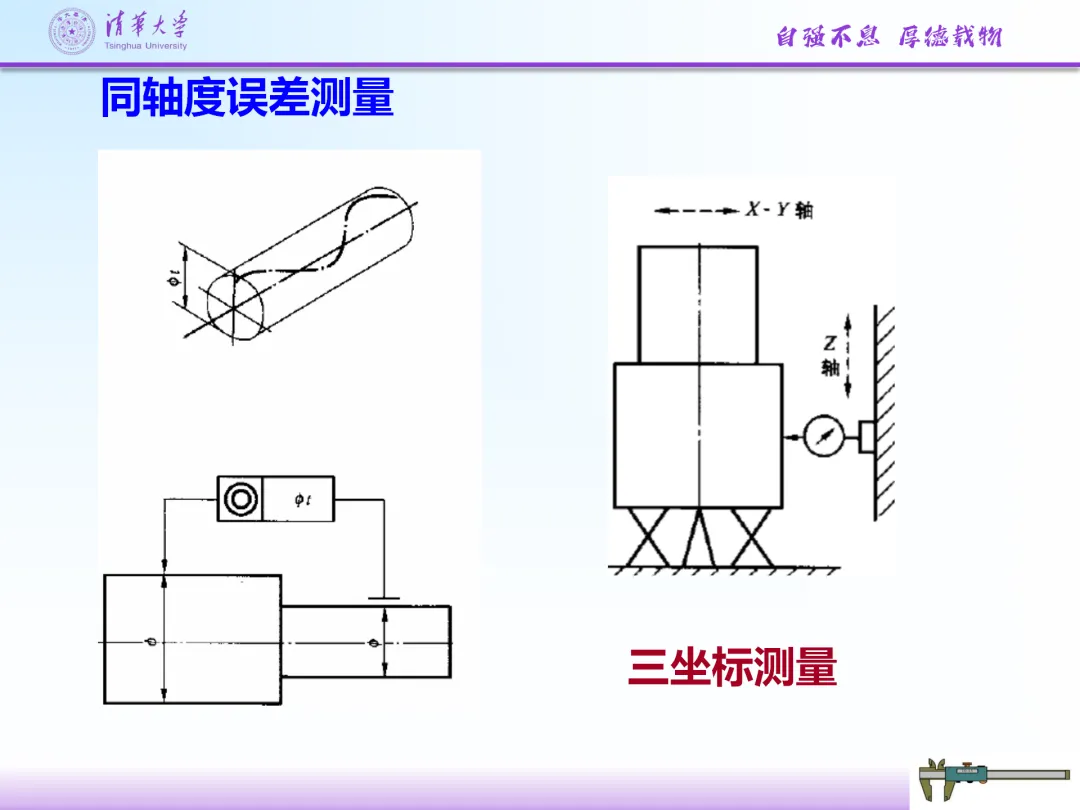
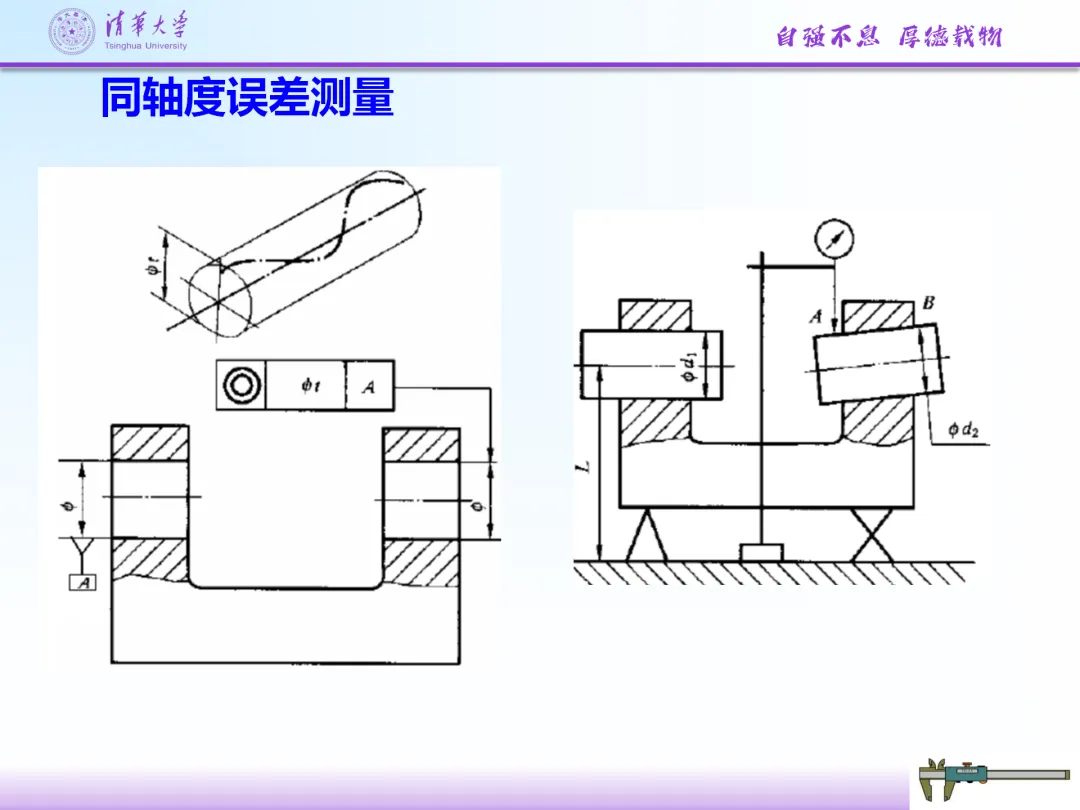
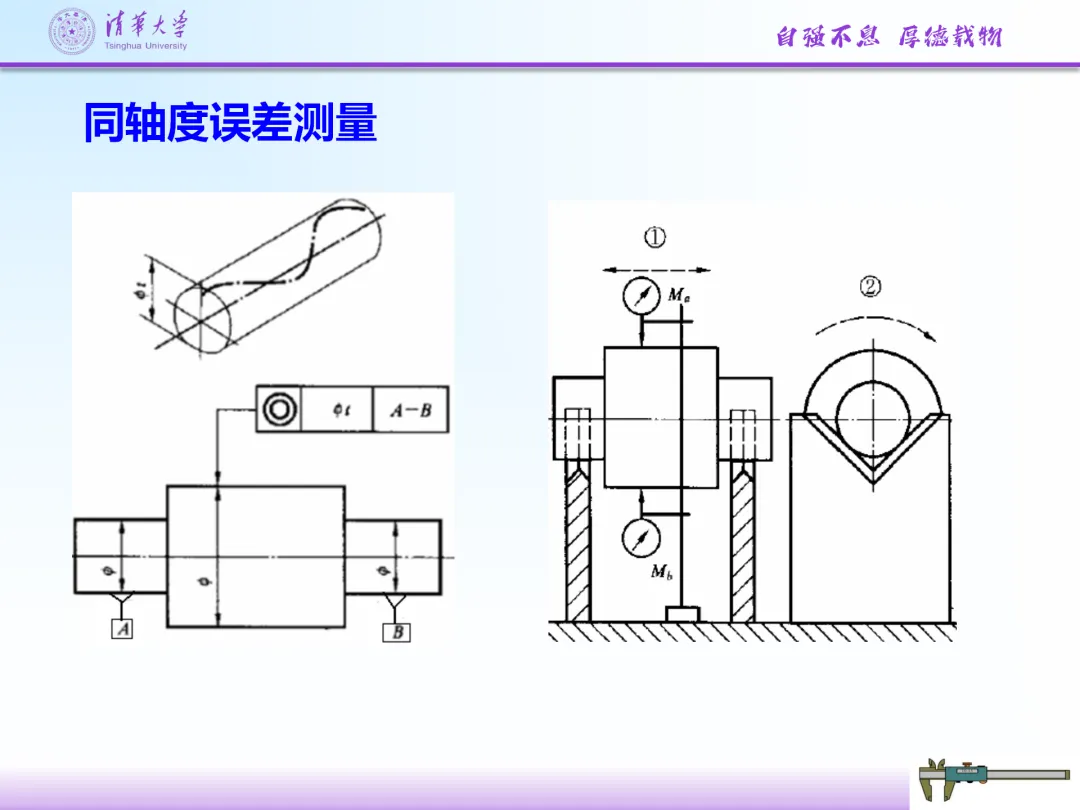
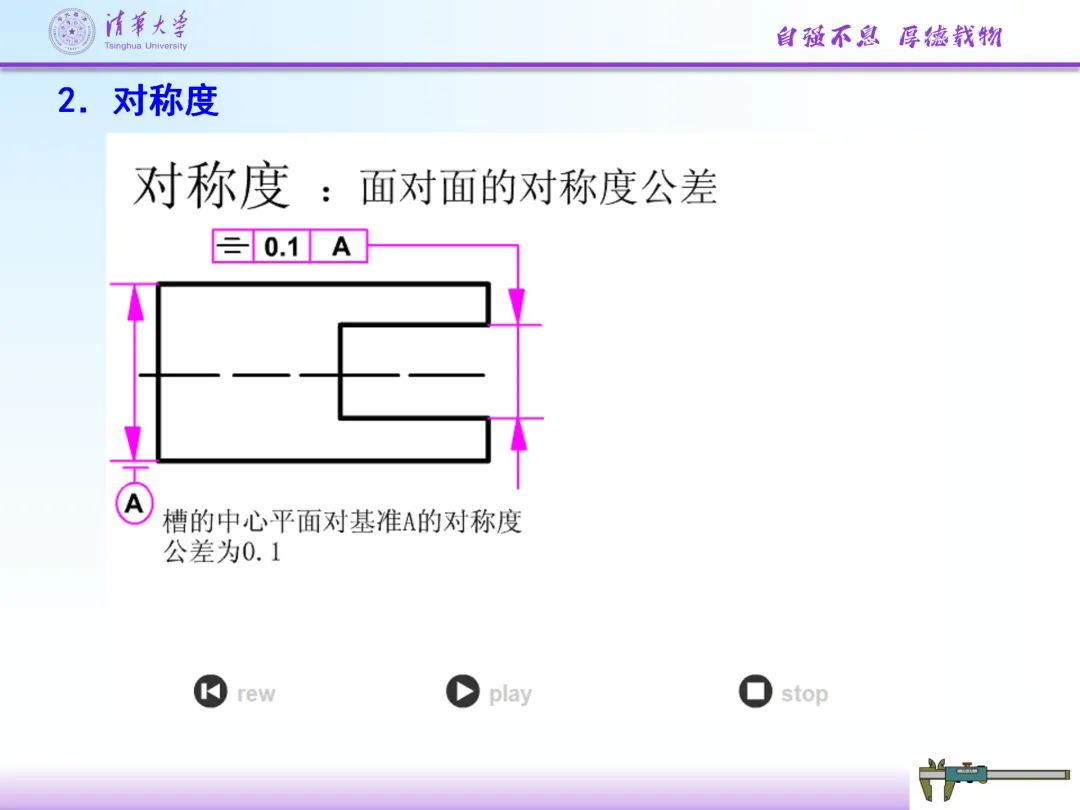
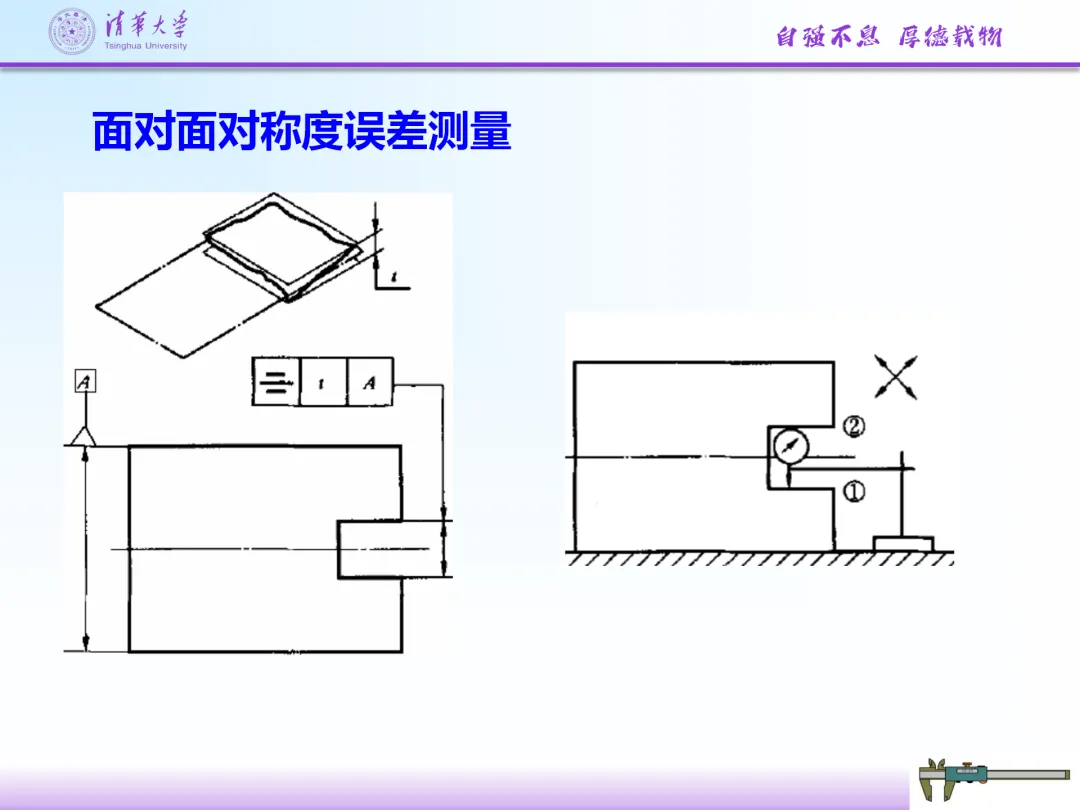
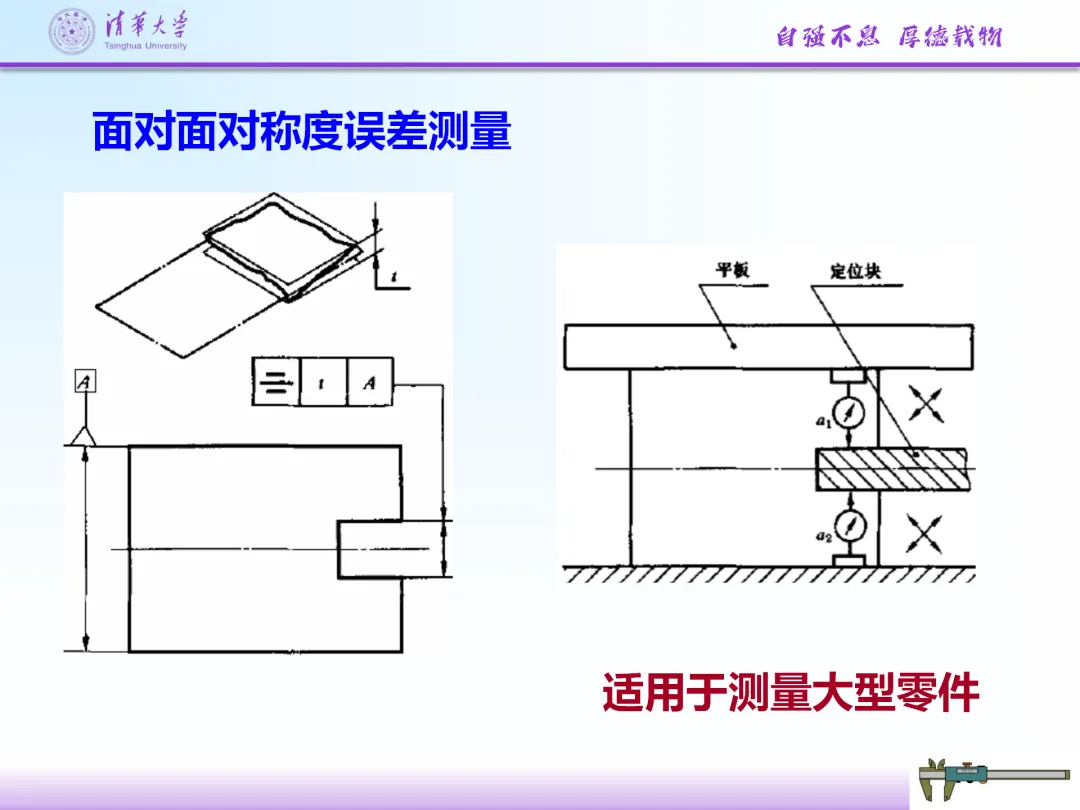
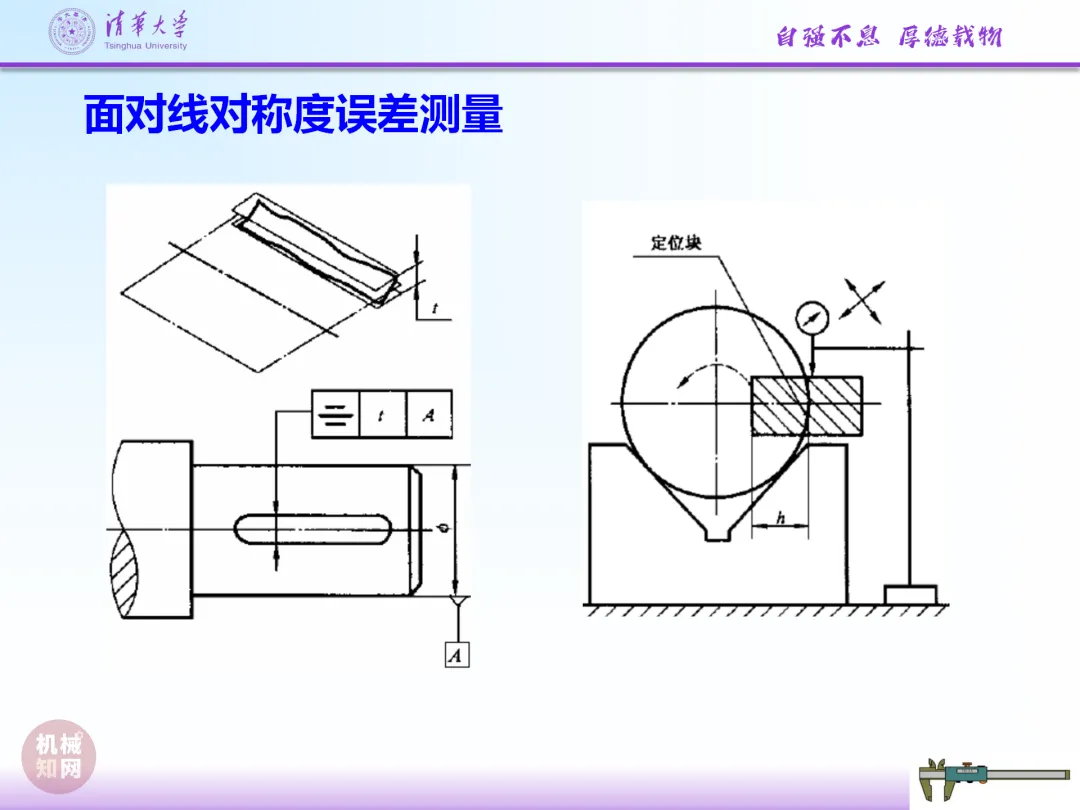
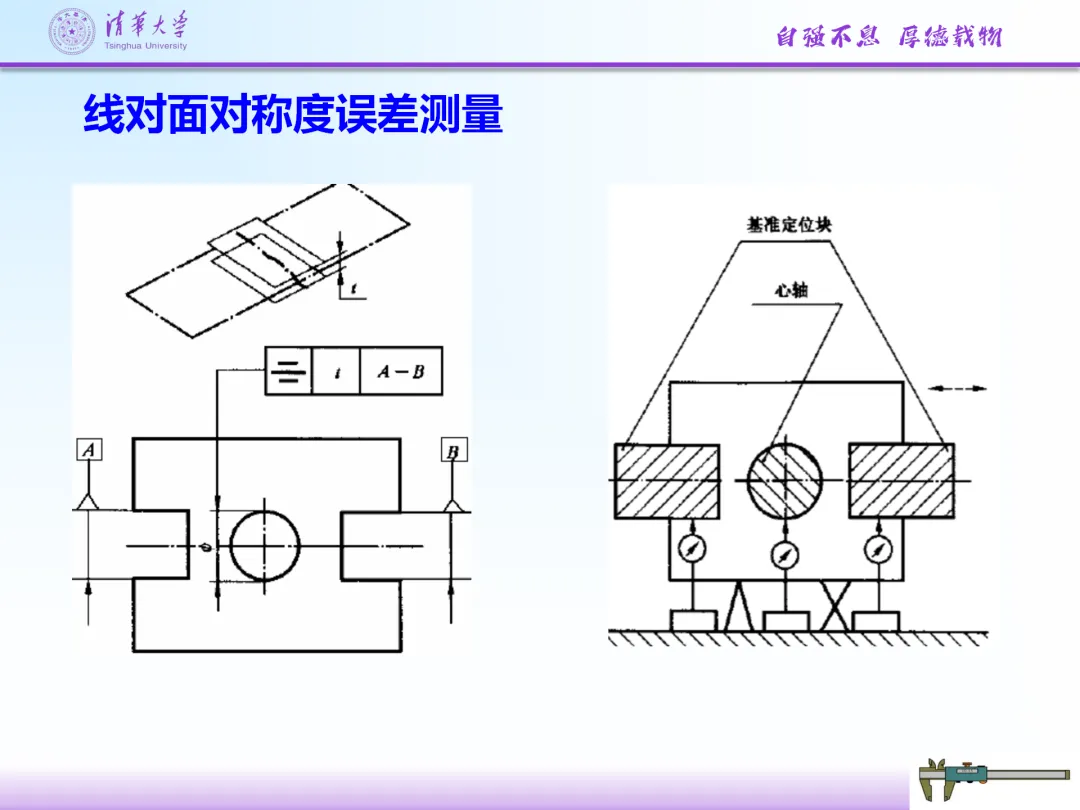
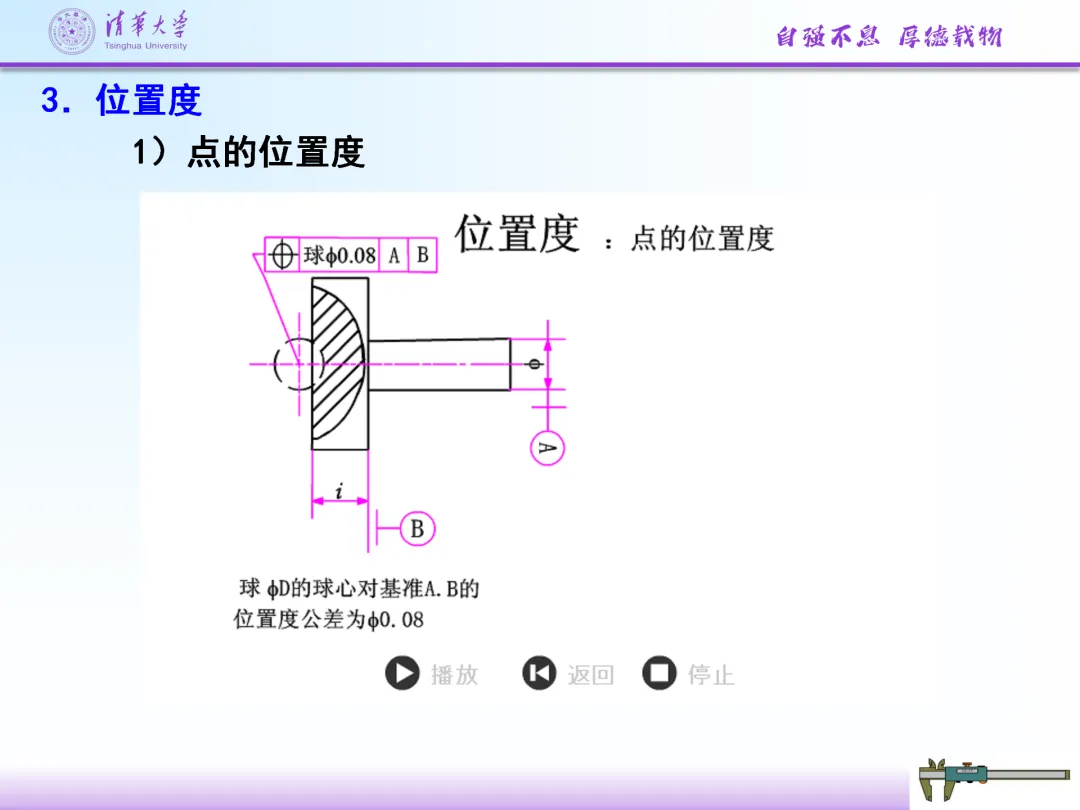
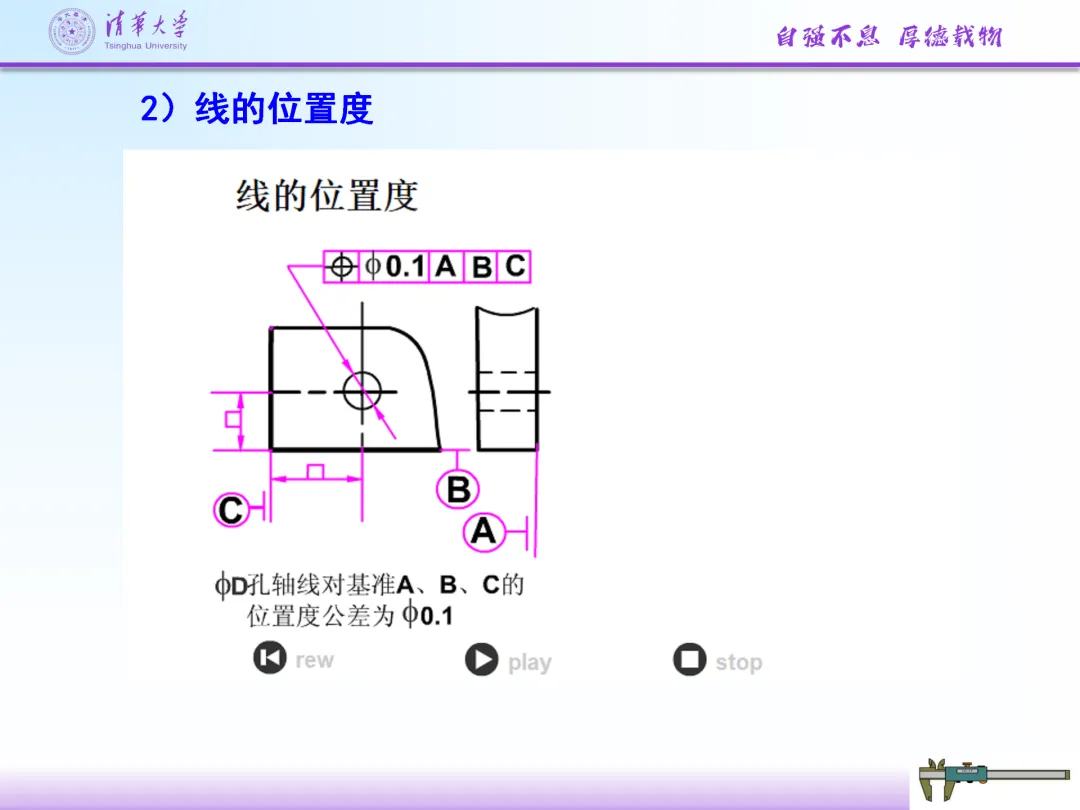
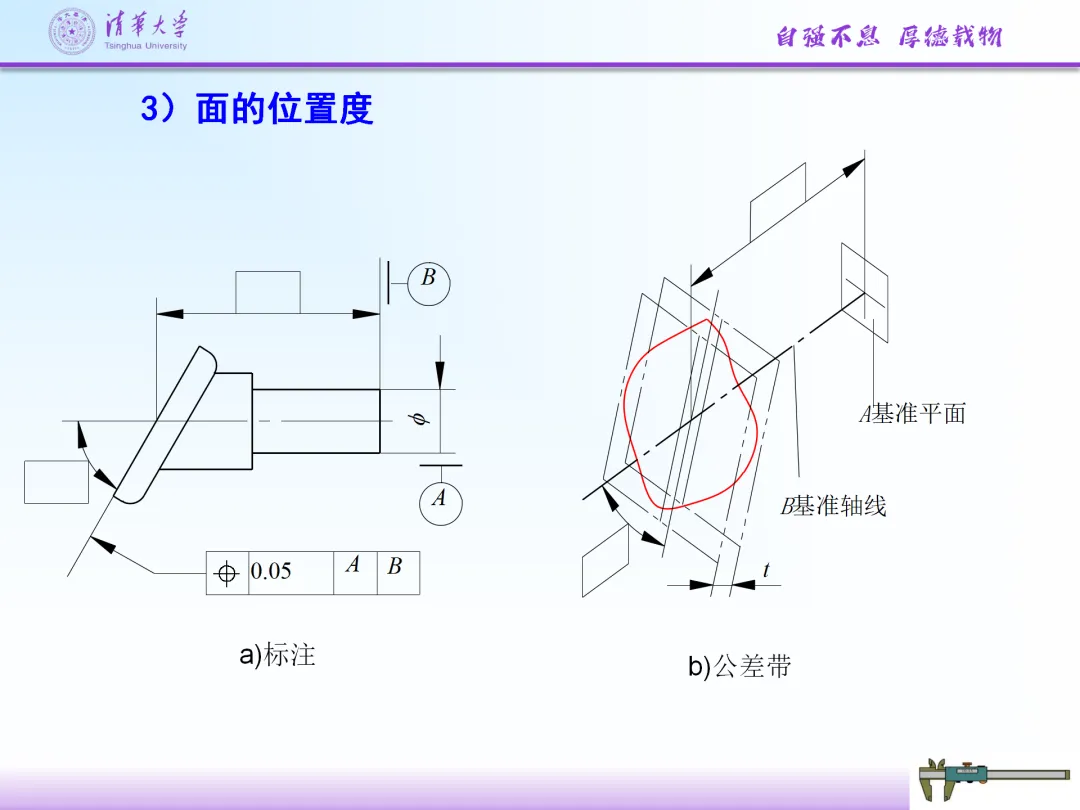
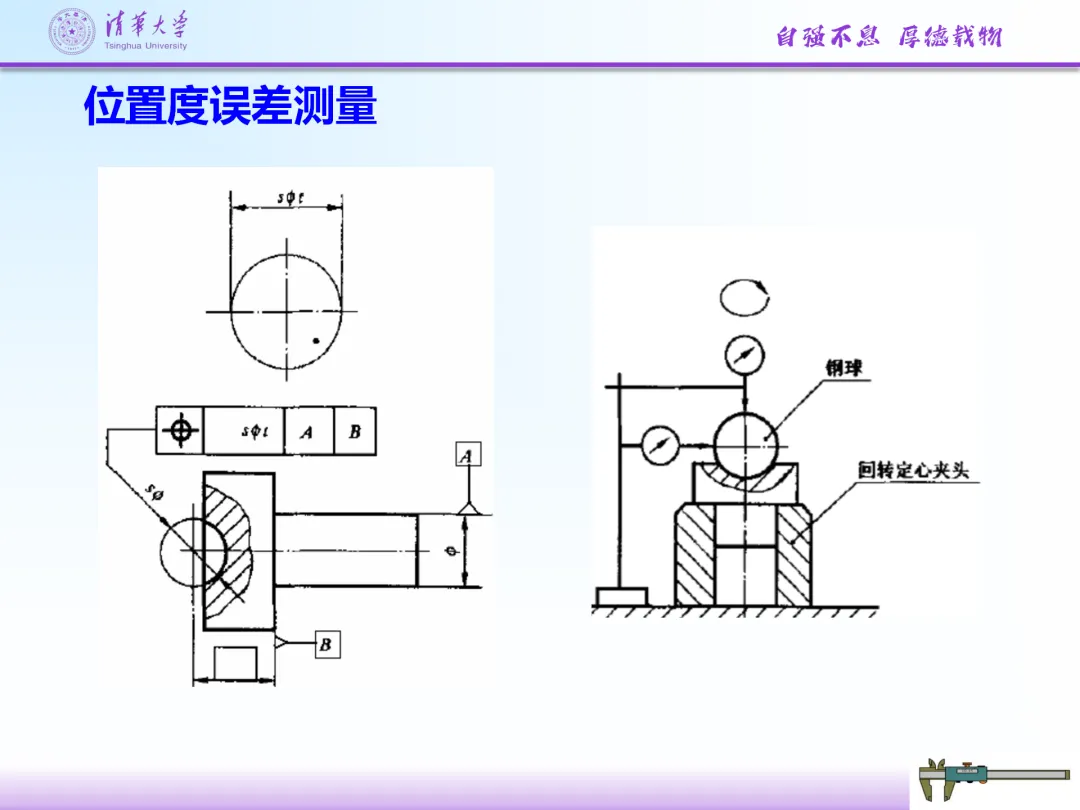
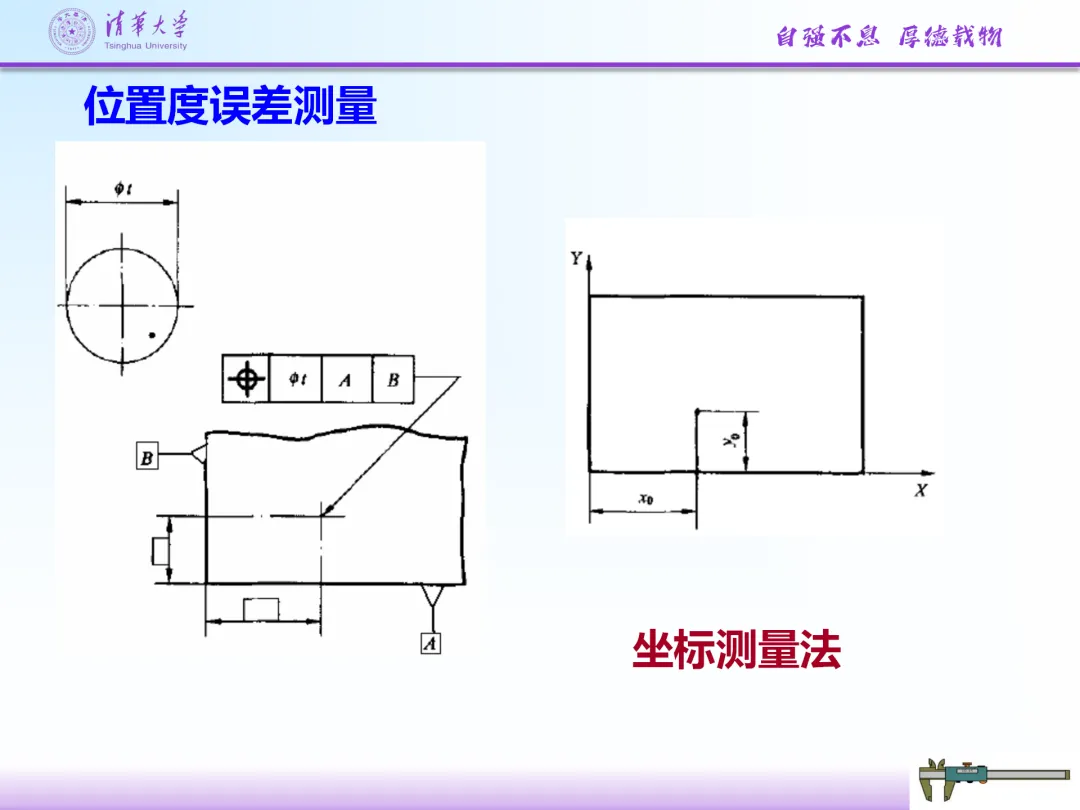
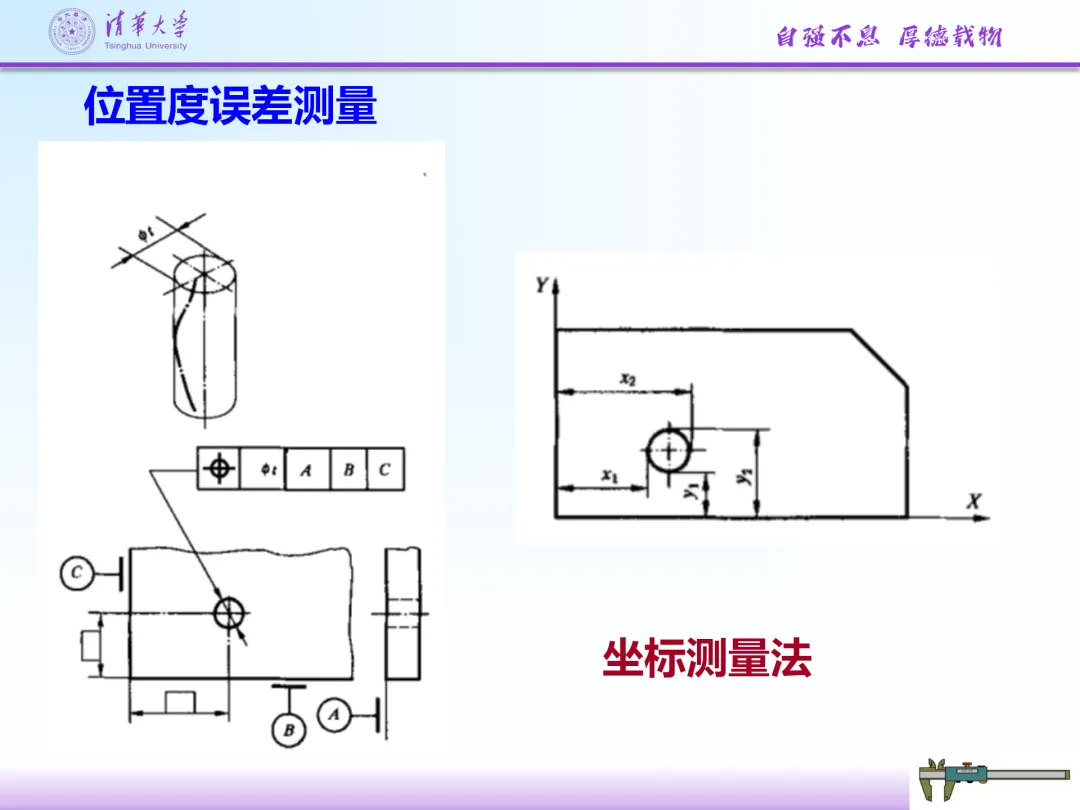
定位公差控制被测要素对基准的位置误差,有同轴度(控制轴线共轴)、对称度(控制中心要素共面)、位置度(控制点线面的理想位置)三项。
四、跳动公差
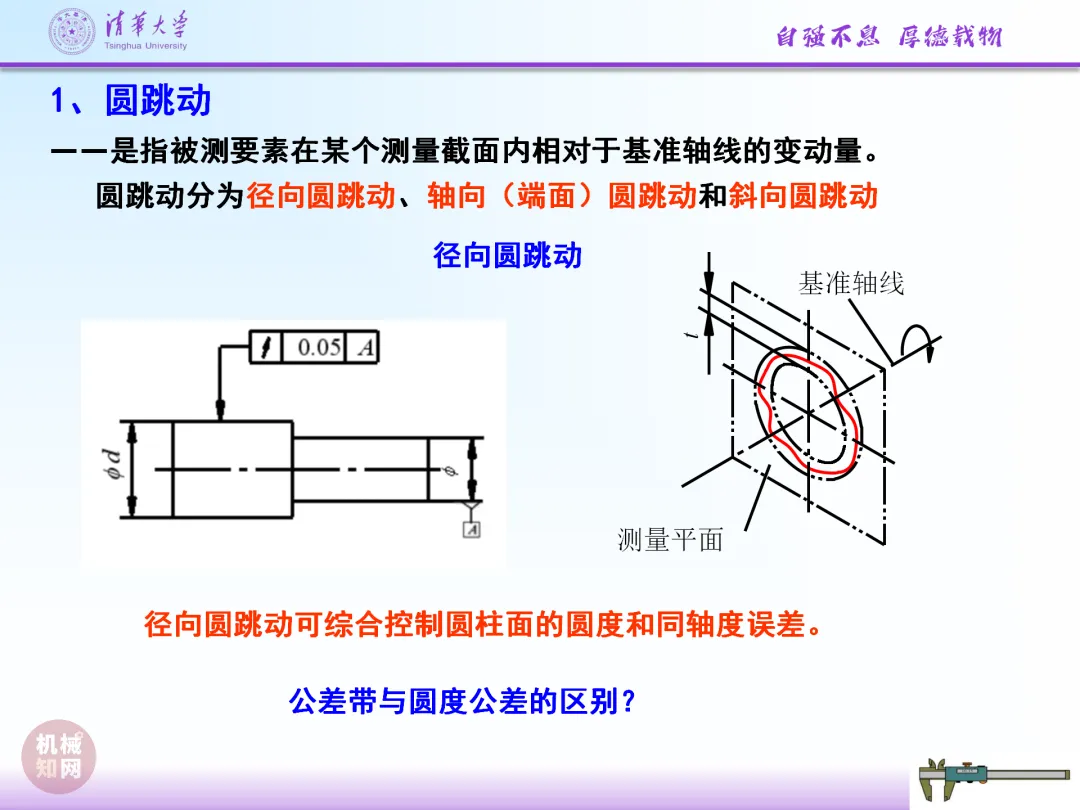
跳动公差是以特定的检测方式为依据而给定的公差项目,分为圆跳动和全跳动。圆跳动是指被测实际要素绕基准轴线作无轴向移动回转一周中,由位置固定的指示器在给定方向上测得的最大与最小读数之差。
全跳动则是指被测实际要素绕基准轴线连续回转,同时指示器沿理想素线连续移动,在整个过程中测得的最大与最小读数之差。
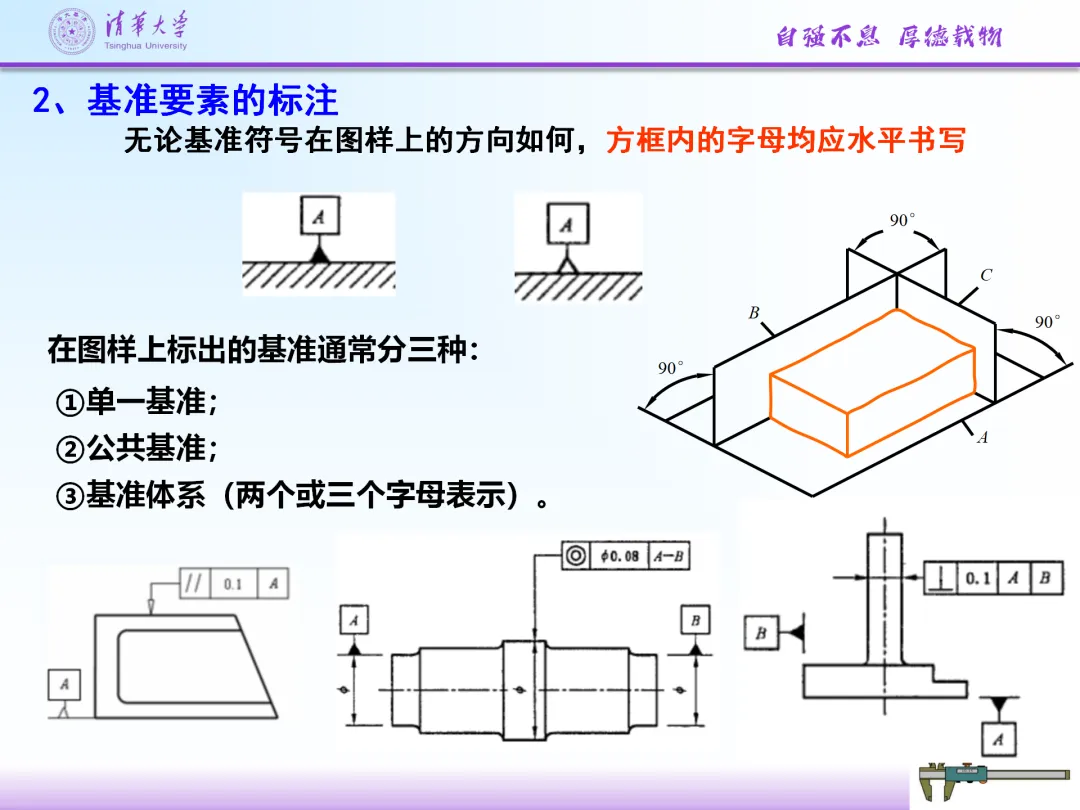
五、公差原则与基准
公差原则包括独立原则、包容原则、最大实体原则和最小实体原则等。
①独立原则是指尺寸公差与几何公差互不干涉、独立发挥作用(ISO标准采用)。
②包容原则要求实际尺寸应在最大实体状态内,通常用于严格保证配合性质的场合。
③最大实体原则允许在零件处于最小实体状态时增大形位公差,适用于仅要求可装配性的场合。
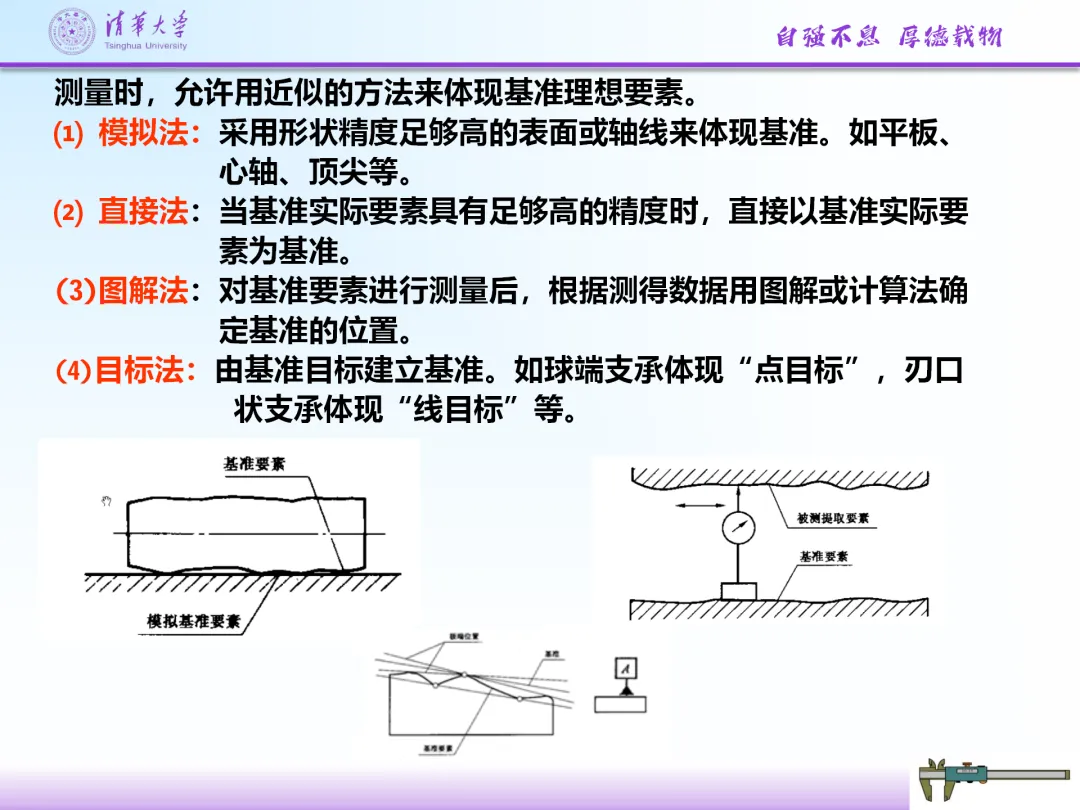
六、检测方法与标注规范
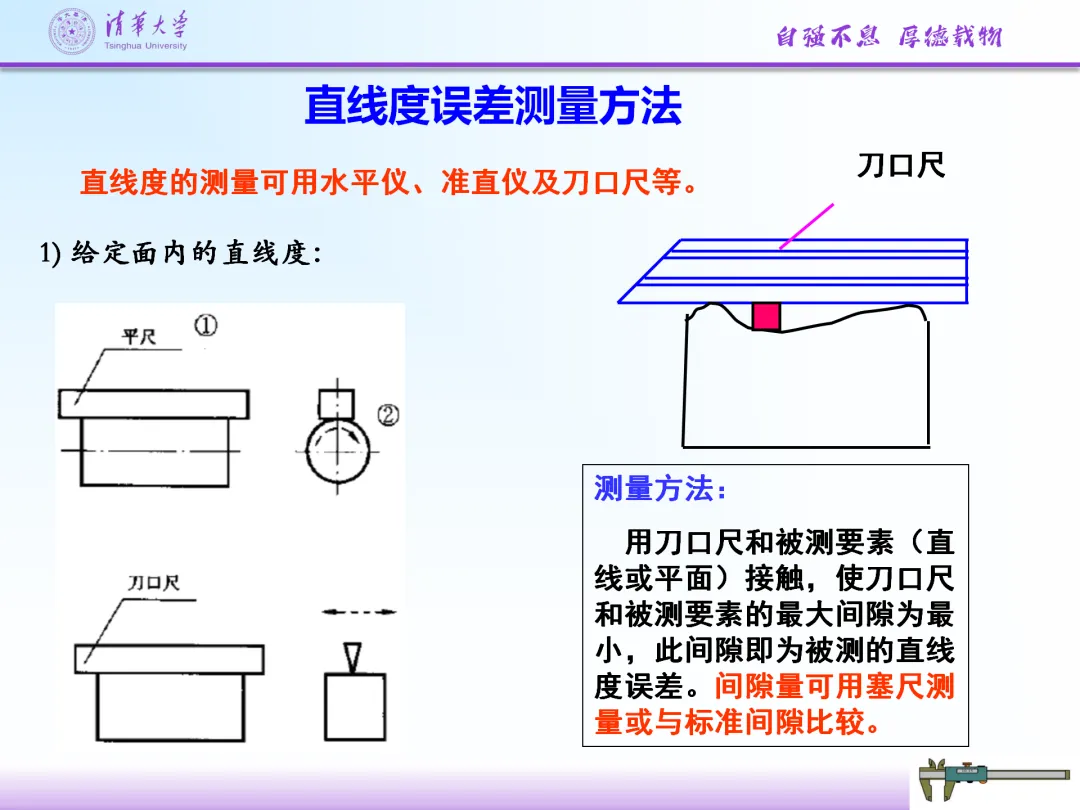
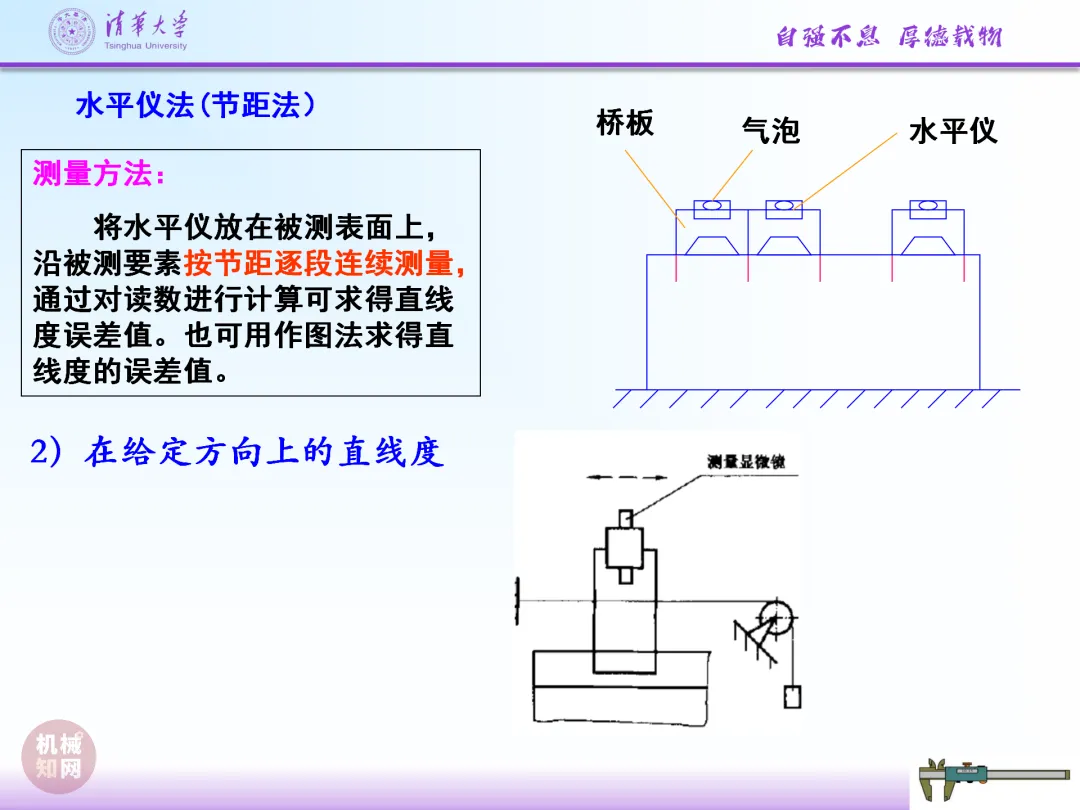
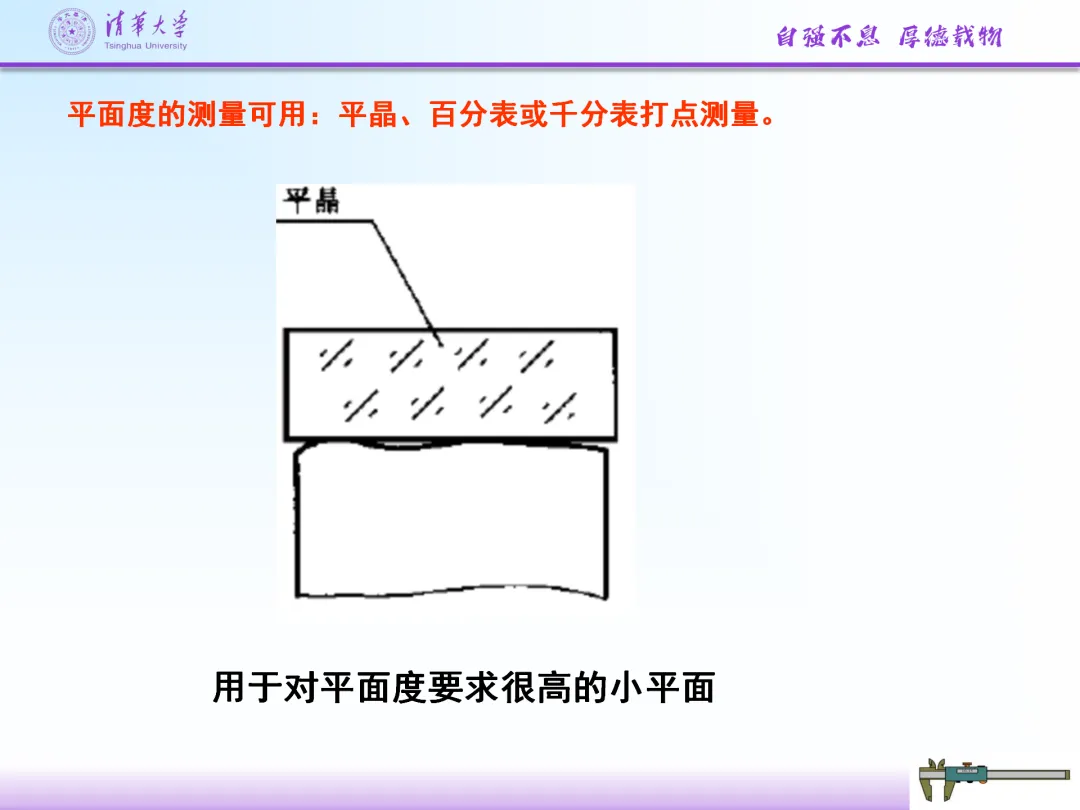
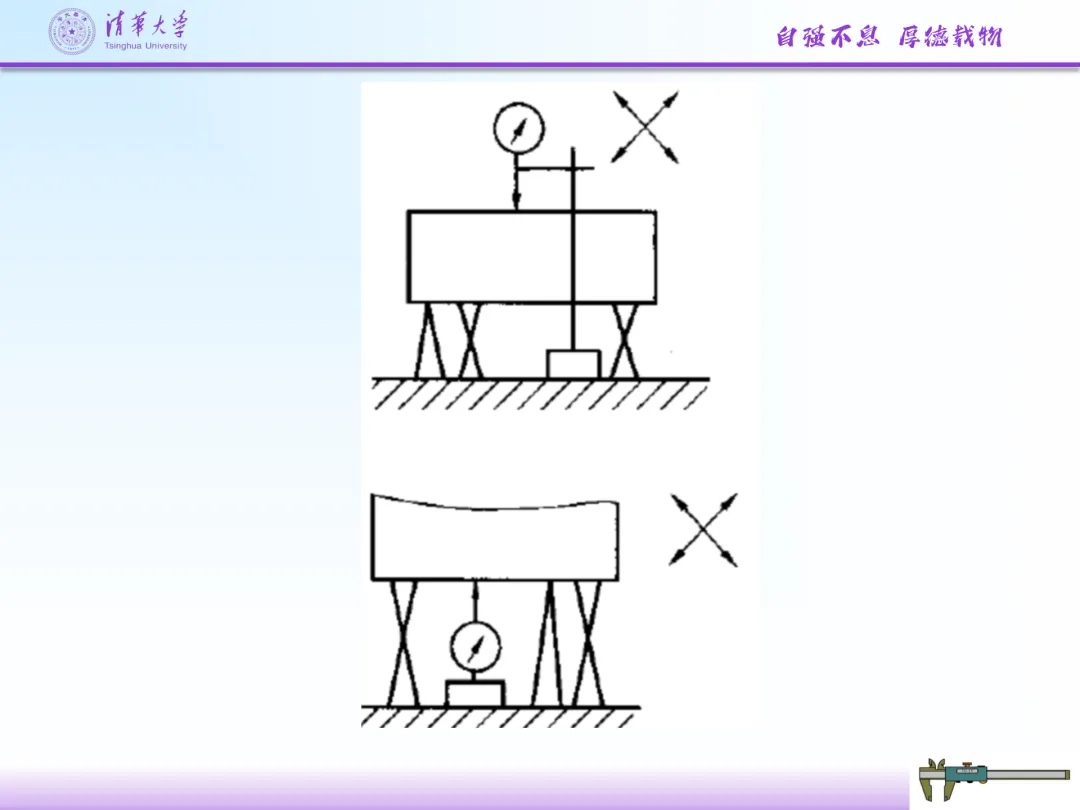
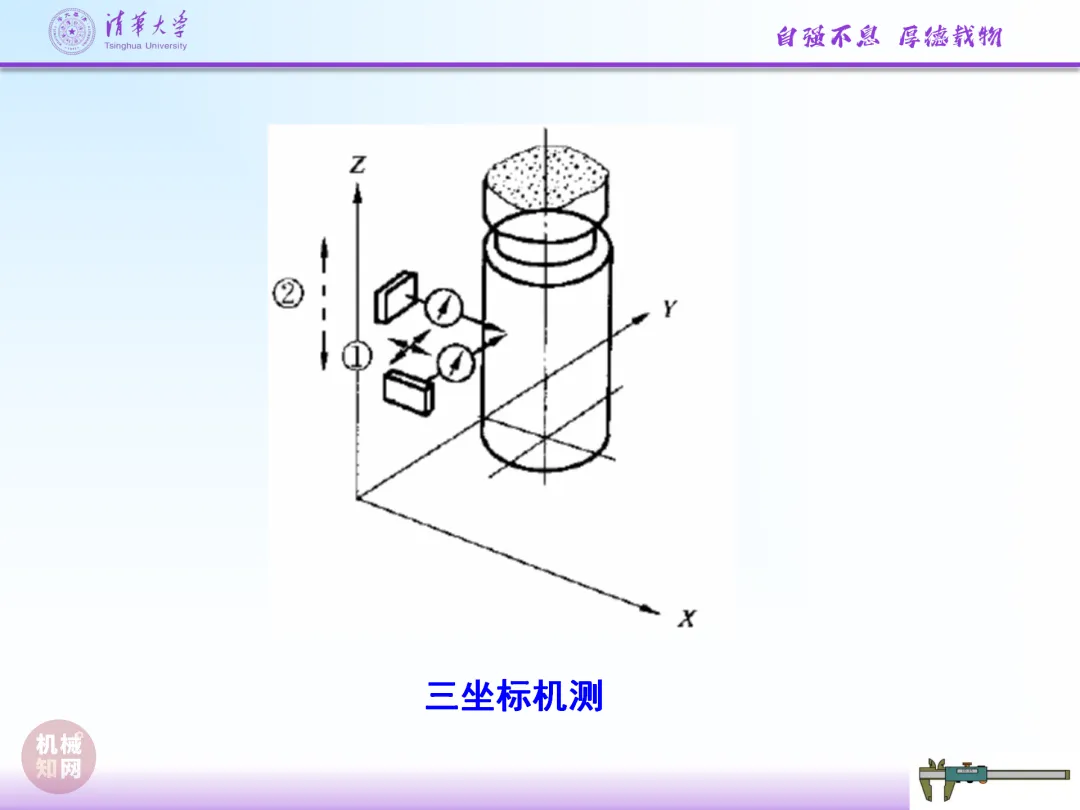
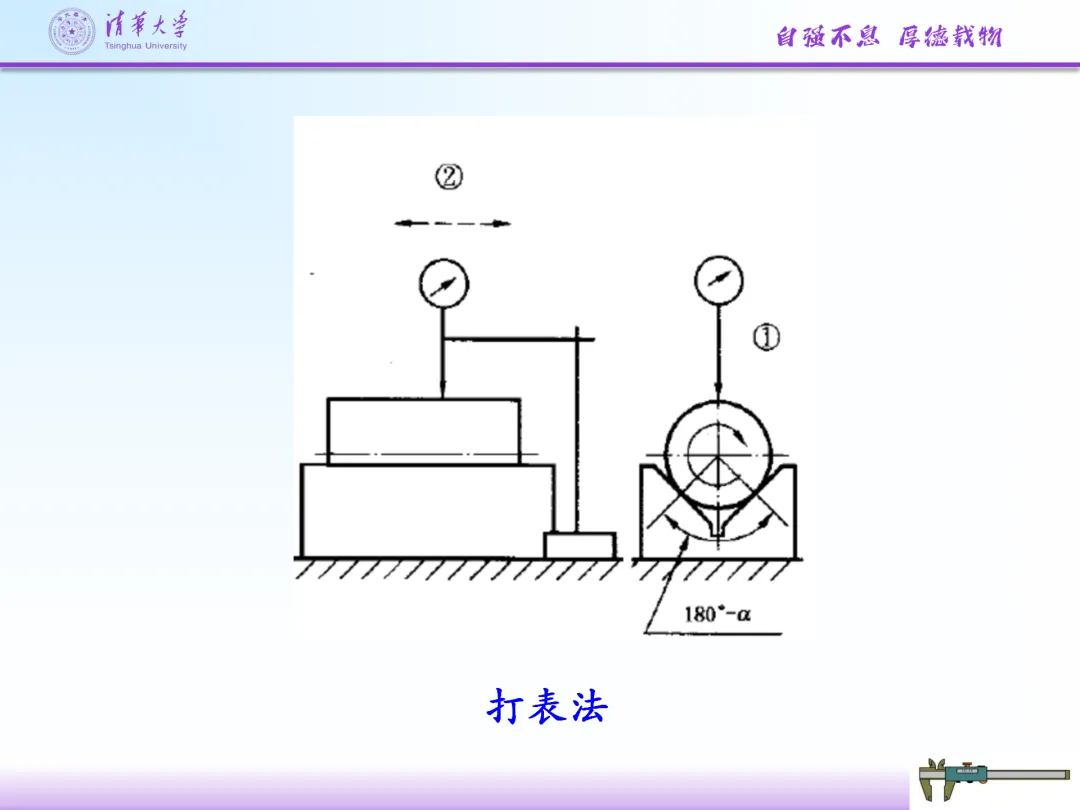
形位公差的检测方法有接触式测量(百分表、千分尺、偏摆仪等)和非接触式测量(激光扫描、三坐标测量机等)。高效测量可采用数据采集仪连接指示表,自动读取数据并分析形位误差。
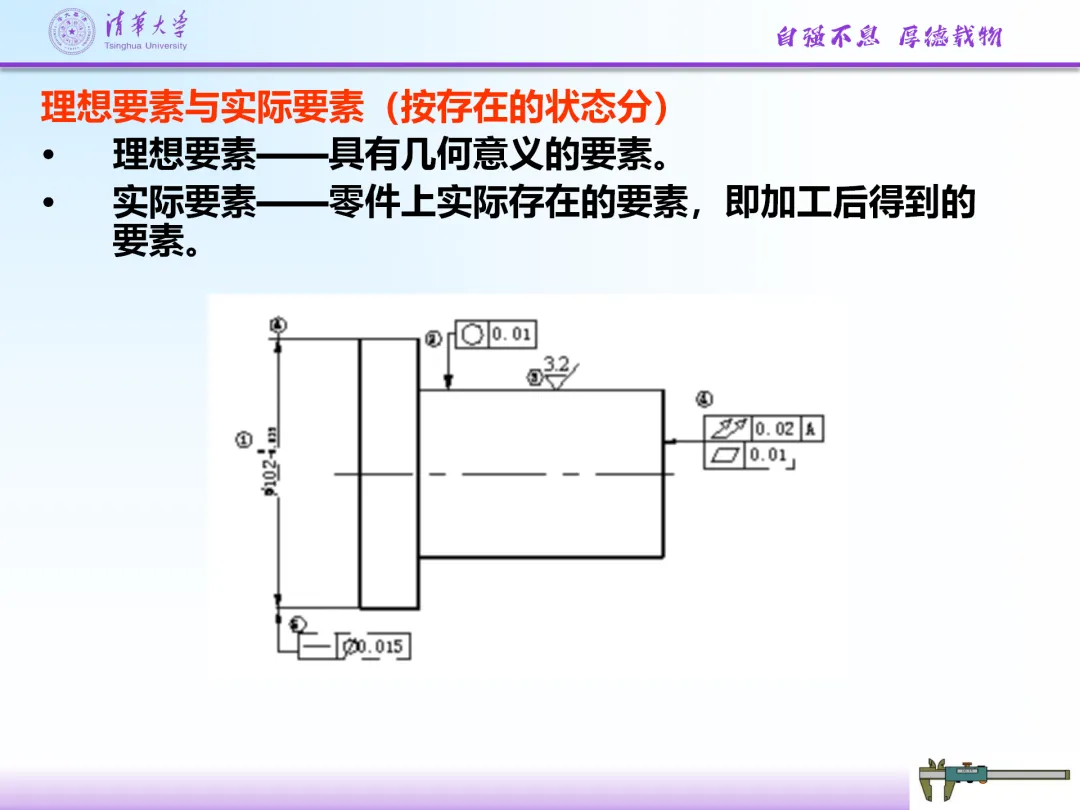
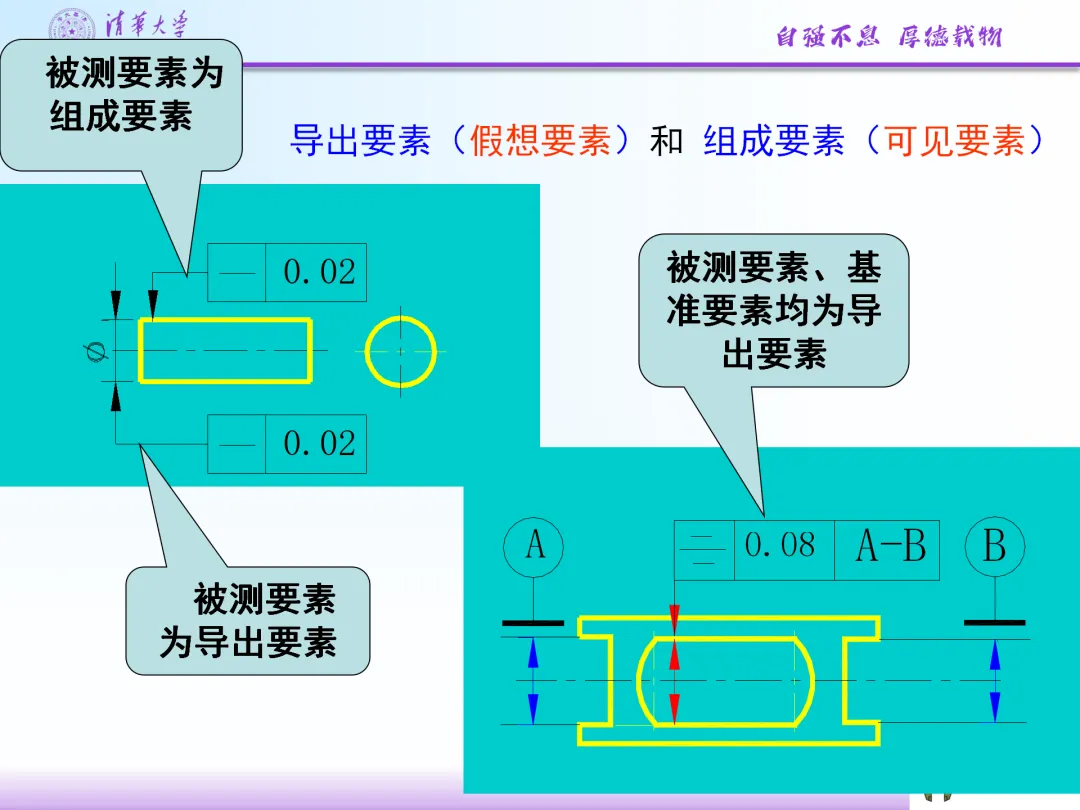
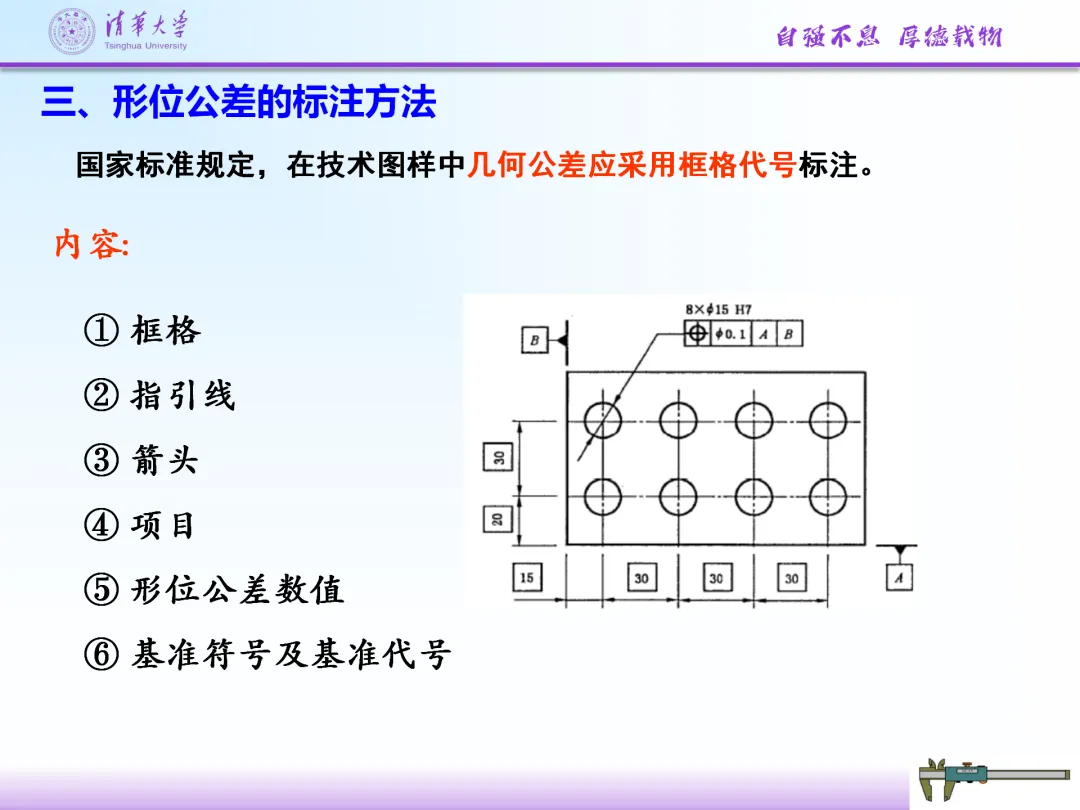
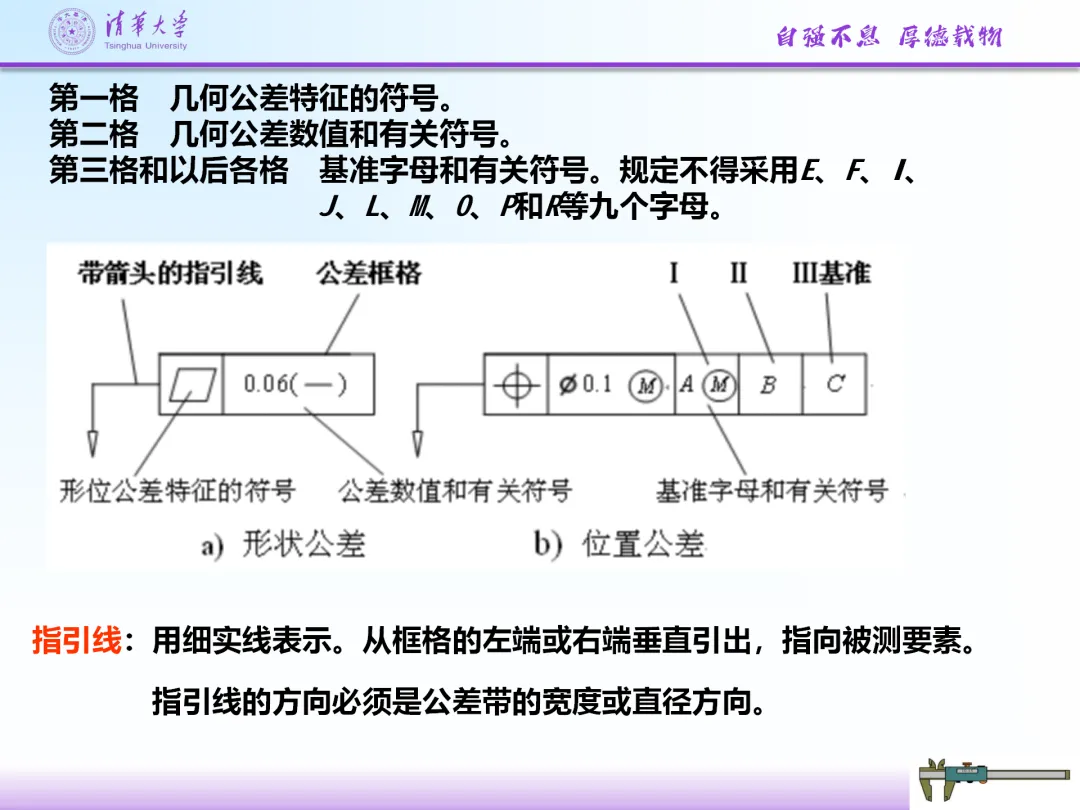
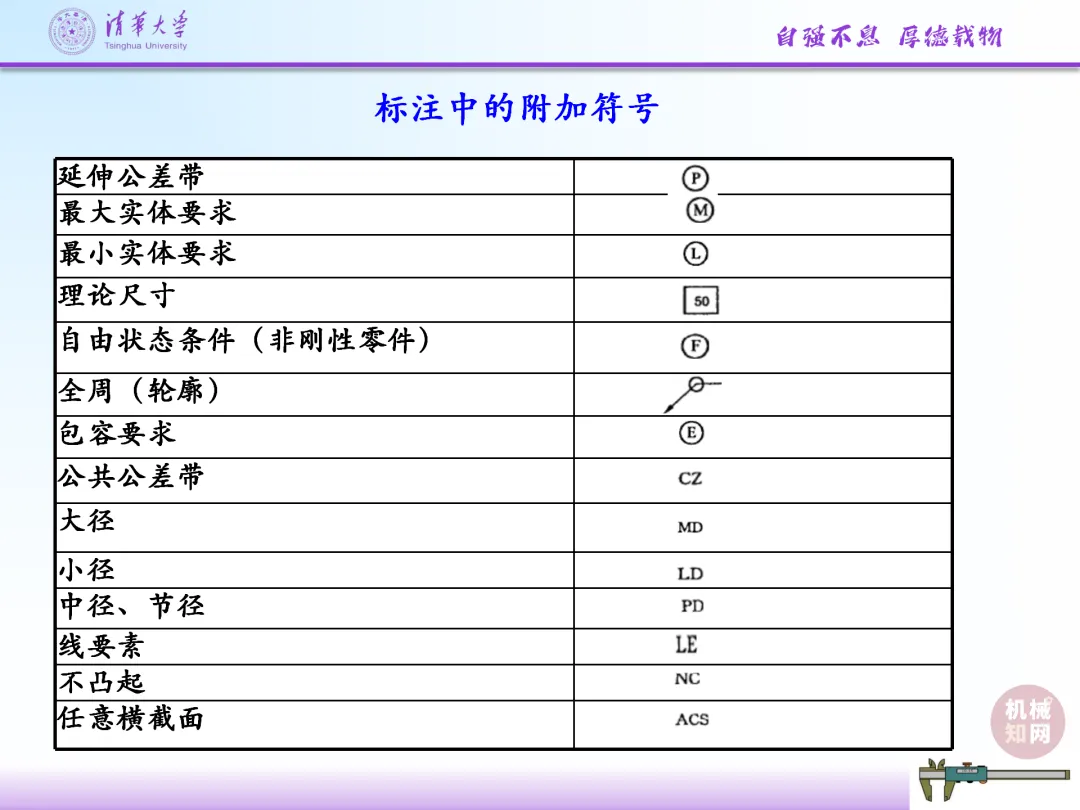
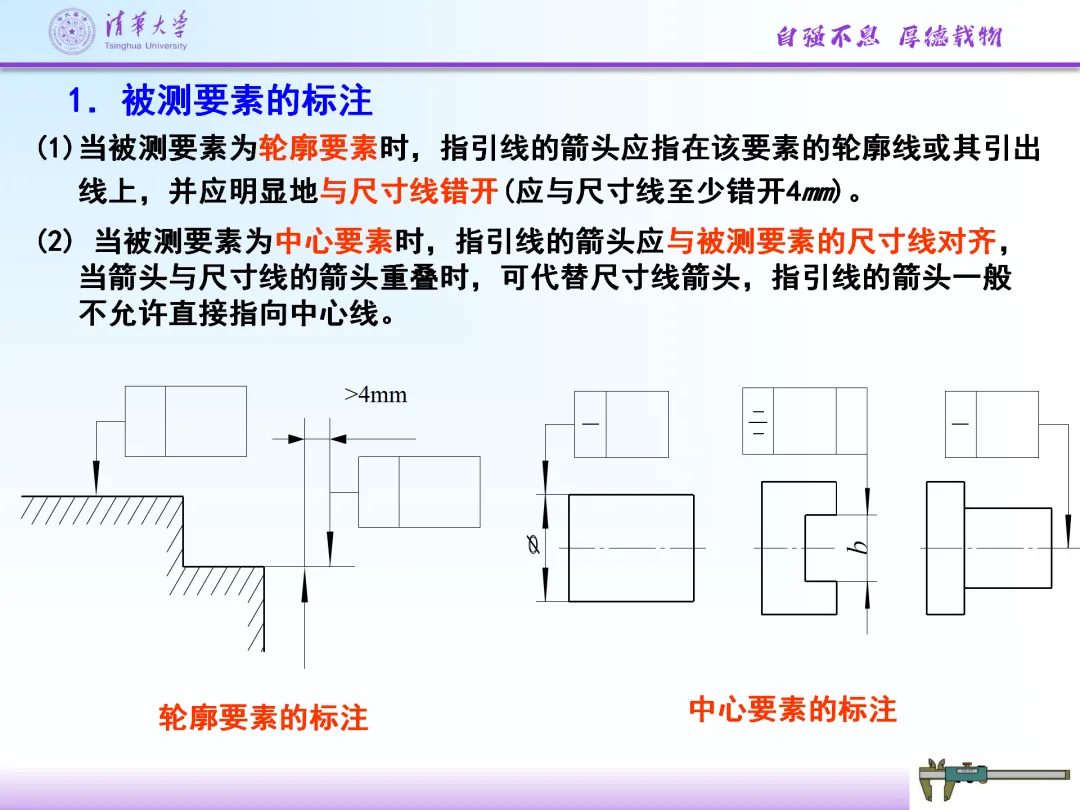
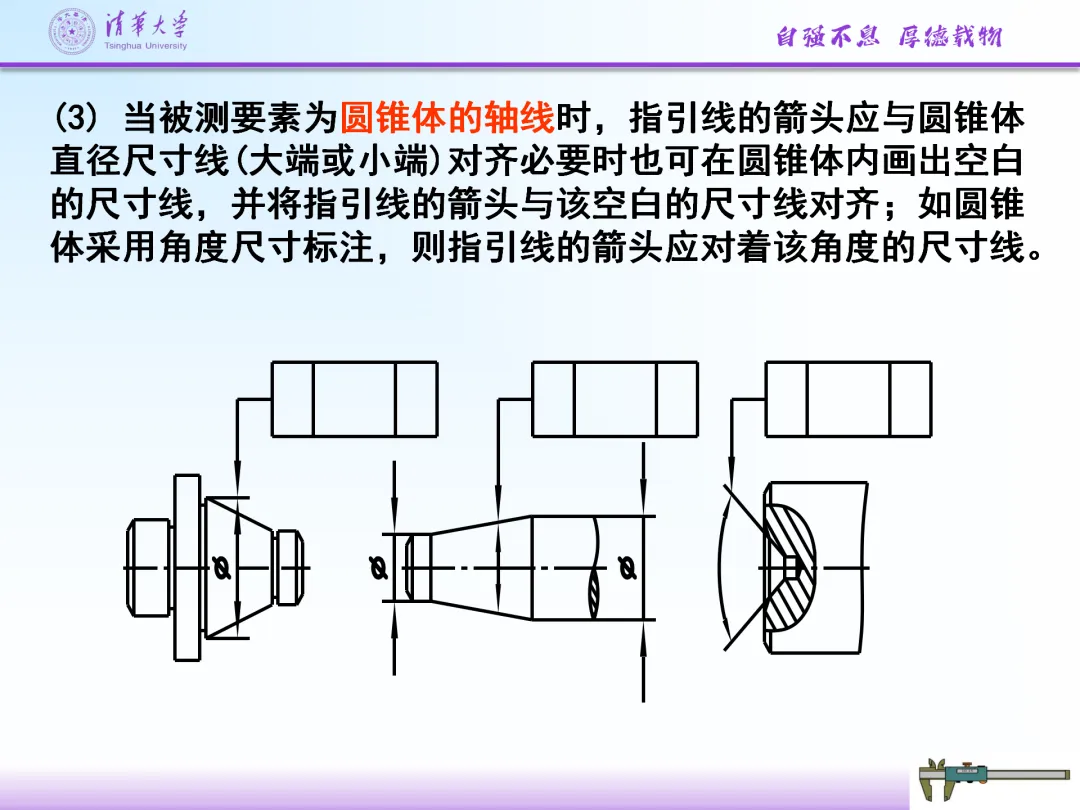
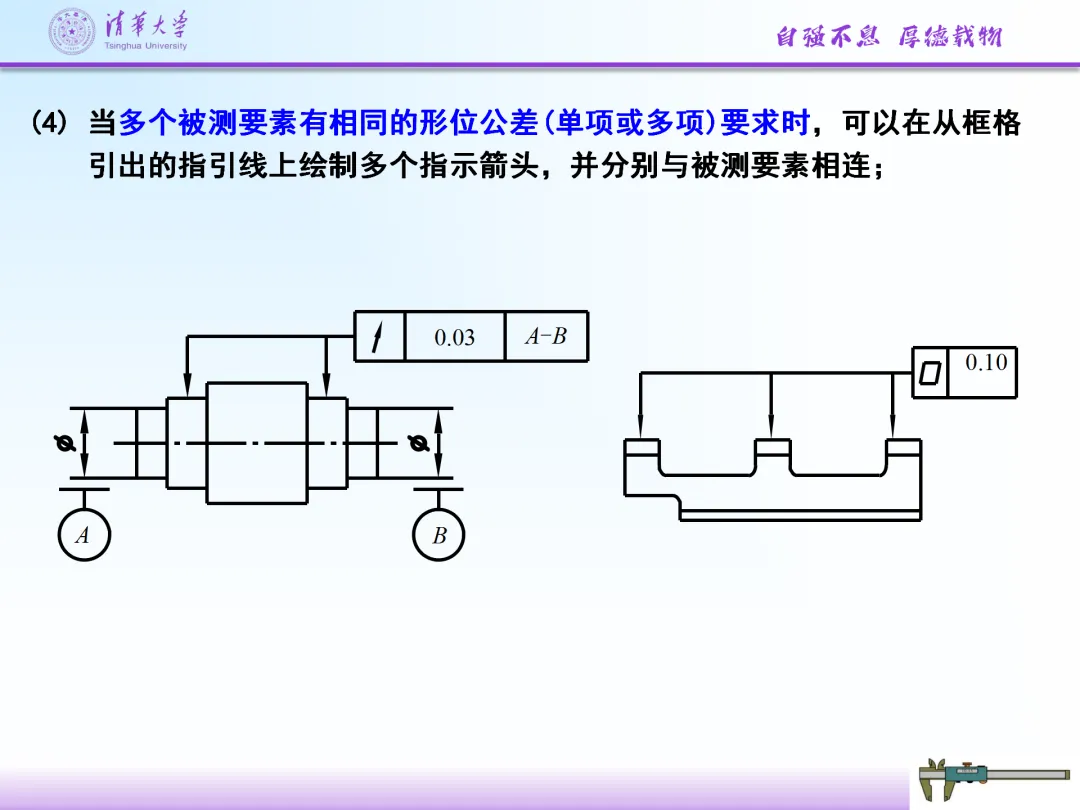
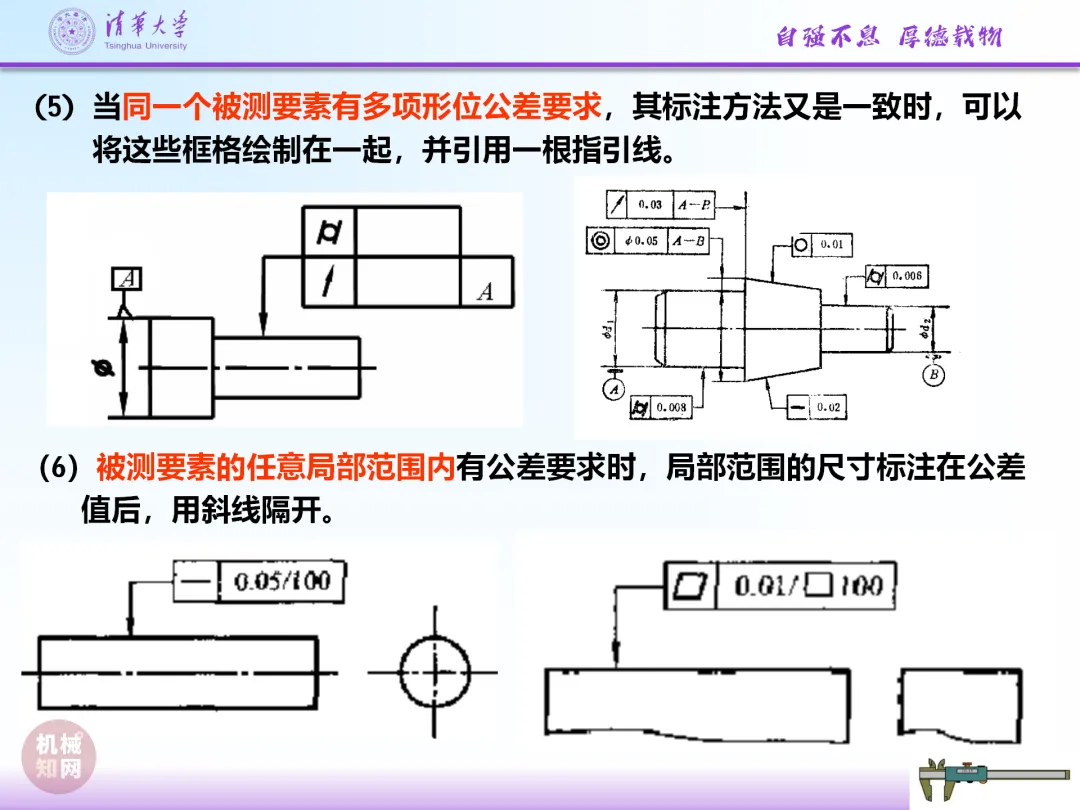
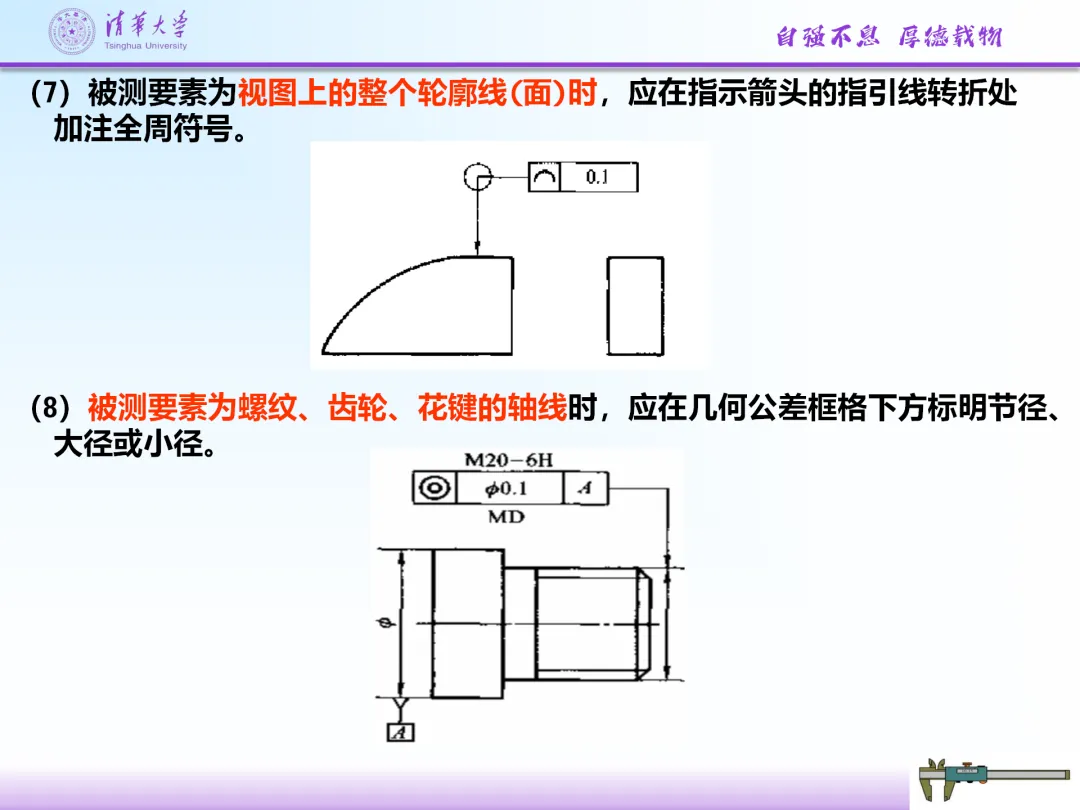
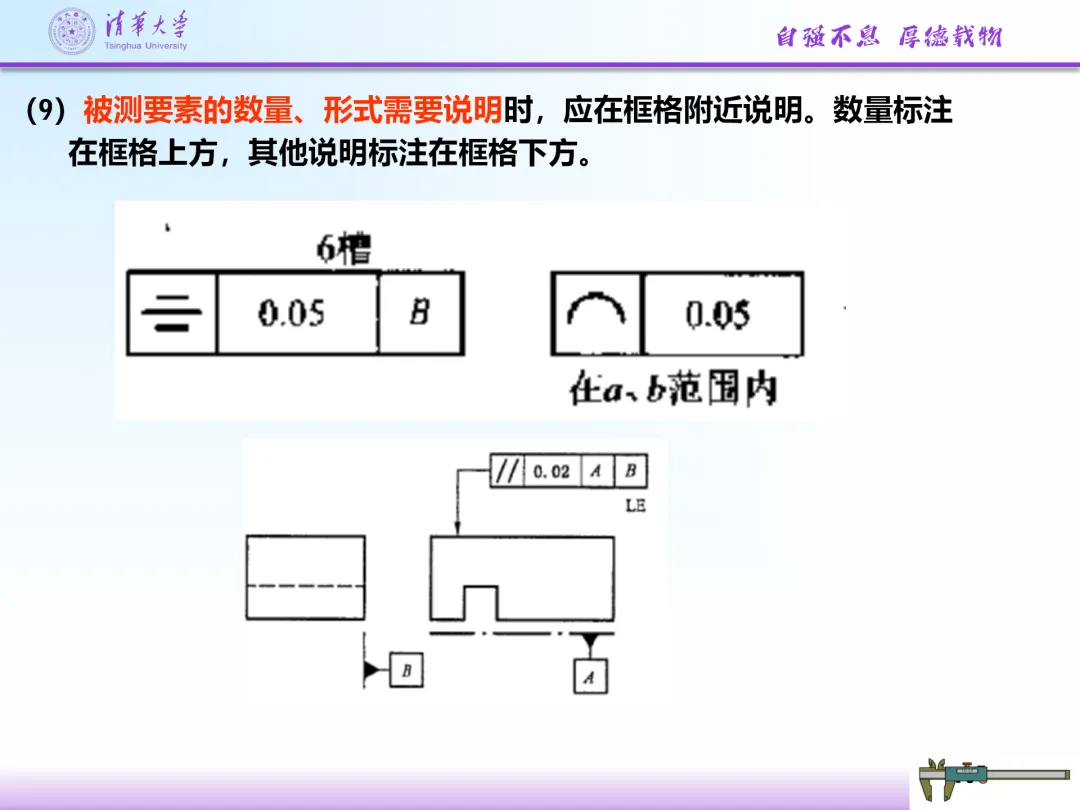
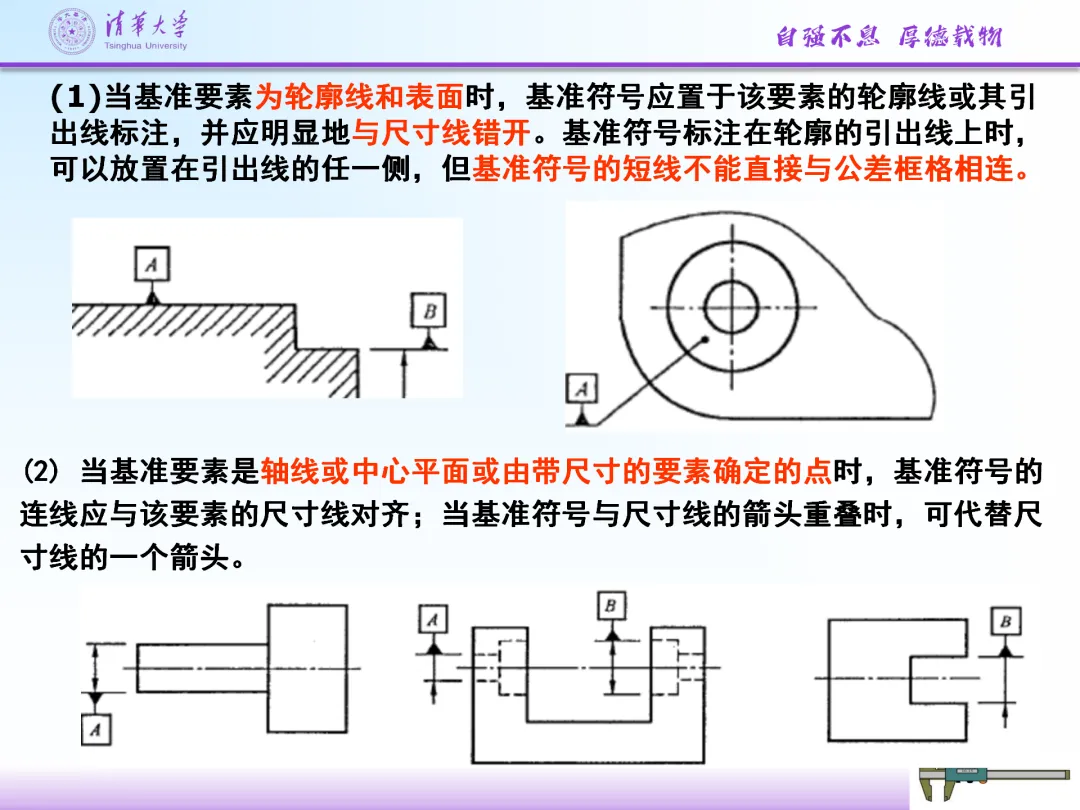
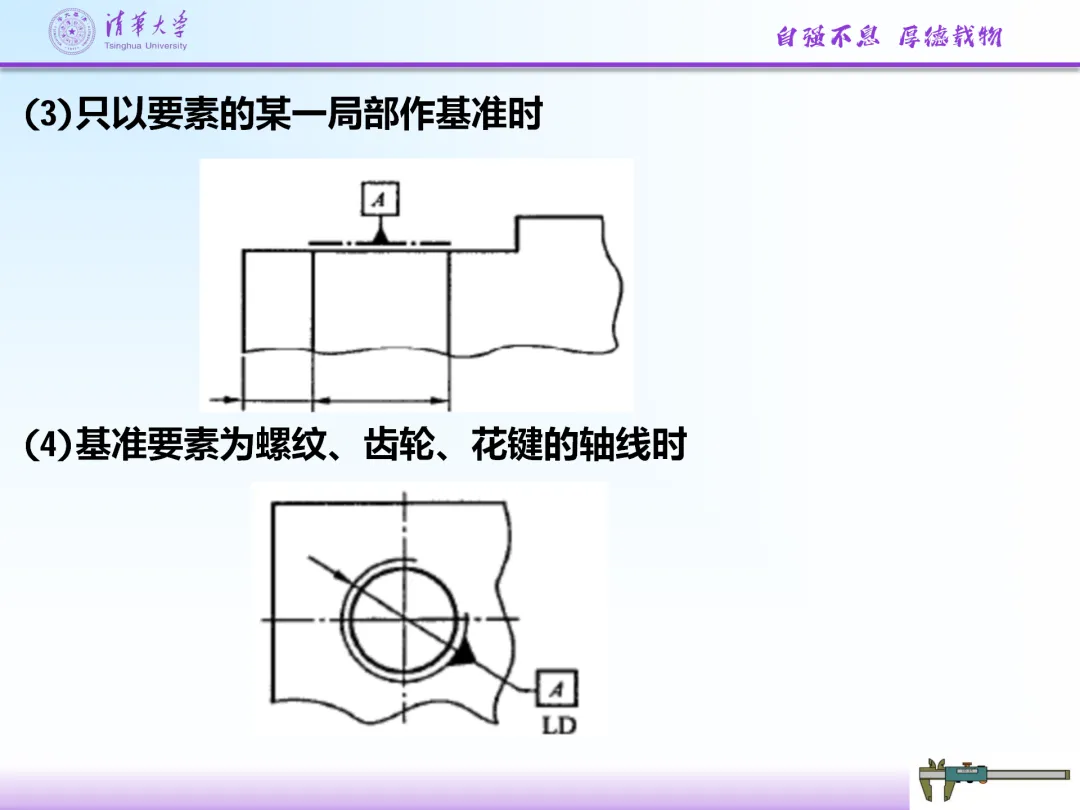
标注时,形位公差内容用框格表示,第一格为项目符号,第二格为公差数值,第三格以后为基准字母。被测要素为中心要素时,箭头必须与有关尺寸线对齐;为轮廓要素时,箭头一般垂直于该要素。公差带为圆形或圆柱体时,数值前加注“Φ”。遵守最大实体要求时,需加符号Ⓜ
50万+工程师都在看↓↓↓
1. 回复【动图】领取10000+个机械动图及视频包
2. 回复【CAD】领取800GAutoCAD全套视频教程
3. 回复【UG】领取800G的UGNX全套视频教程
4. 回复【SW】领取800G的Solidworks全套教程
5. 回复【机械设计】领取800G(非标)机械设计资料